
Fターム[3C030DA01]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | 組立ラインへの複数部品の供給 (166)
Fターム[3C030DA01]に分類される特許
1 - 20 / 166
ピッキングシステム
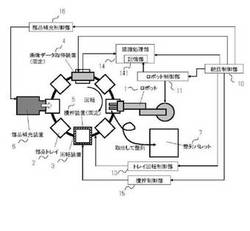
【課題】継続的に部品供給することができるピッキングシステムを提供する。
【解決手段】複数の部品トレイに収容された部品を循環させ、部品トレイに収容された部品の態様から、ロボットがピッキング可能または不可能を判定するピッキング判定手段と、このピッキング判定手段がピッキング可能と判定したときは、この部品トレイに収容された部品を前記ロボットにピッキングさせるロボット制御手段と、ピッキング判定手段がピッキング不可能と判定したときは、この部品トレイに収容された部品を攪拌する攪拌手段と備える。
(もっと読む)
エレベータ部品検索システム

【課題】エレベータの膨大な部品群の管理や必要な部品を探す作業者の手間を省力化できるエレベータ部品検索システムを提供することである。
【解決手段】エレベータ部品検索システムは、管理サーバおよび端末装置を通信可能に接続している。管理サーバは、端末装置から送信される検索要求に基づいて、製番部品情報に示された部品に対応する部品保管情報を検索し、製番部品情報に示された部品が保管エリア内に保管されていない場合は、当該部品に対応する加工実績情報を検索し、検索された部品保管情報を端末装置へ送信する。端末装置は、部品保管情報に基づいて、部品が保管エリア内に保管されているか否かを示す情報を表示部に表示させ、部品が保管エリア内に保管されていない場合は、加工実績情報に基づいて、当該部品が加工されているか否かを示す情報を表示部に表示させる。
(もっと読む)
シャフトとカムロブの組付方法及びその装置
【課題】小スペースでシャフトとカムロブが組付けできる組付方法及びその装置を提供する。
【解決手段】複数のカムロブを載せたパレット80を移動して第一のカムロブ3を準備する工程と、シャフト2の軸芯出しを行いながら両端を保持する工程と、シャフト2の外周に第一の隆起部2aを成形する工程と、パレット80を軸線方向に移動し、パレット80内から第一のカムロブ3を第一の隆起部2aに組付ける工程と、シャフト2の保持を解除しパレット80をシャフト2から取り外し、パレット80を移動して前記複数のカムロブから第二のカムロブを準備する工程と、シャフト2の軸芯出しを行いながら再度両端を保持する工程と、シャフト2の外周に第二の隆起部を成形する工程と、シャフト2の軸線方向の移動を規制した状態で、パレット80を軸線方向に移動し、パレット80内の前記第二のカムロブを前記第二の隆起部に組付ける工程と、を有する。
(もっと読む)
情報表示物およびその累積方法並びに情報表示物を掛けるボード
【課題】 記載されている特定の情報を容易に確認することができると共に、収集に必要な場所を省スペース化でき、且つ回収作業も容易に行うことができる情報表示物およびその累積方法並びに情報表示物用のボードを提供することを目的とする
【解決手段】 前面に特定の情報が記載された情報表示物であって前記情報表示物に切込みを入れることで形成された差込部を備え、前記切込みが差入口として使用可能に形成されており、第1の情報表示物の前記差入口に前面側から第2の情報表示物の差込部を挿入することで、第1の情報表示物の前面に第2の情報表示物を重ねた際に前記第1の情報表示物の前記特定の情報が視認可能に表示されるように、それぞれ同一の位置に前記特定の情報が記載された情報表示物およびその累積方法並びにその情報表示物用のボードを用いる。
(もっと読む)
部品組付け作業システム
【課題】部品・作業工具受け持ちキャリヤーをその部品の被組付け対象物と同期して前進させることにより、その部品の組付け作業性を向上する。
【解決手段】互いに係脱作用する昇降ロッド(37)と揺動アーム(44)との1組を、部品・作業工具受け持ちキャリヤー(C)に取り付ける一方、昇降ロッドを引き下げて揺動アームとの係止状態を保つロッド引き下げ用具(51)とその引き下げ後の昇降ロッドを押し進める駆動片(52)とを、被組付け対象物(M)に設置して、上記キャリヤーを被組付け対象物と同期して前進往動させると共に、そのキャリヤーの往動中にある揺動アームの前端部が固定物(58)側から突出する受け止めストッパー(57)と衝突するや、上記揺動アームとの係止状態を解かれた昇降ロッドが上昇復帰して、キャリヤーだけが自づと後退復帰するように定めた。
(もっと読む)
生産システム、製品の製造方法及び物品収容容器の搬送方法
【課題】タクトタイムを低減できる生産システム、製品の製造方法及び物品収容容器の搬送方法を提供する。
【解決手段】生産システム10は、物品Pが収容された物品収容容器Cをそれぞれの物品供給位置に搬送する搬送機構36a〜36dが複数並んで設けられた物品供給機30と、物品供給位置にある物品収容容器C及びこれに収容された物品を把持して搬送する搬送装置34と、制御装置33とを備え、制御装置33は、物品供給機30に搬送機構36a〜36dの内の1つのみを選択して物品収容容器Cを物品供給位置に搬送させる機能と、搬送装置34に物品供給位置に搬送された物品収容容器Cから物品を把持して搬送位置へ搬送させる機能と、搬送装置34に物品供給位置に搬送された物品収容容器Cを把持し、物品供給位置から、別の搬送機構の物品供給位置の上方を通過して搬送位置に搬送させる機能とを有する。
(もっと読む)
部品供給装置および部品供給方法
【課題】作業者が部品の供給および取出を行う際のロボットの作業時間ロスを抑制してサイクルタイムを短縮する。
【解決手段】部品供給装置は、作業者32によりワークがセットされた第1トレイ10がロボット作業領域側に押し出されスイッチ22aをオンしたことを検知するとロック機構23を動作させ、ロボット30がワークを用いて作業を行う。部品供給装置は、ロボット30が完成品を第1トレイ10へ戻したことを検知するとロック機構23を解除し、作業者32が第1トレイ10を引き寄せて完成品を取出し新たな部品を供給できるようにする。これにより、ロボット30が第1トレイ10のワークで作業する間に、作業者32がもう一方の第2トレイ20の完成品取出と部品供給を行うことができる。
(もっと読む)
組立前準備作業支援システム
【課題】複数の部材を組立てて組立て品を製作する組立工程において、組立に必要なネジを、組立作業前に予め整列させて準備する作業を支援する。
【解決手段】組立に必要なネジを組立作業前に予め準備する作業を支援する組立前準備作業支援システムであって、サーバを備え、サーバは、主部材情報、サブ部材情報及びサブ部材を主部材に組み付ける際に必要なネジに関する情報を登録する組付情報登録手段と、ネジ情報等が、サブ部材を主部材に組付ける組付け順に予め登録された組付工程データベースと、所定の列数を有するマトリックスパターンを出力するマトリックスパターン出力手段と、マトリックスパターンの各行の識別表示をする行識別表示手段とを含み、マトリックスパターン出力手段は、組付け順のネジの仕様毎の本数と等しいセル数を含む最小の行数である仕様毎行数を算出する仕様毎行数算出手段を有する。
(もっと読む)
組立ラインにおける部品配膳システム
【課題】載置された部品がワークに組み付けられて空となったトレイの回収ラインの短縮化ができ、部品を搬送する走行台車の走行経路の短縮化が可能で、ワークに部品を組み付ける搬送ラインを短縮化できるものを提供。
【解決手段】搬送パレット3に積載されたワークWを搬送する連続した複数の平行な搬送ライン2より構成され、隣接する搬送ライン2の搬送方向の各上流端に配設され部品棚17を備えた部品配膳ステーション7と、隣接する搬送ライン2の搬送方向の各上流端の一側に配設された搬送台車分離ステーション4と、隣接する搬送ライン2の搬送方向の各下流端の一側に配設された搬送台車連結ステーション5とを有し、一方の搬送ライン2の部品配膳ステーション7、搬送台車分離ステーション4、他方の搬送ライン2の搬送台車連結ステーション5との間を結び、自走式搬送台車8の軌道Kが配設されている。
(もっと読む)
部品配膳・組み立てシステム
【課題】組立工場における部品の入荷作業、組立作業、および生産品種切替時の作業の誤り防止するとともに、配膳エリアの削減、作業効率向上を図る。
【解決手段】生産計画システムが作成した生産計画に基づいて製品の組立に使用する部品の組立前の入荷を指示する部品入荷指示システムと、前記部品入荷指示システムの入荷指示に応じて入荷された部品を移動可能な部品配膳台車の予め定められた部品配膳エリアへの配膳を指示し、予め与えられた製品組立指示情報を基に前記部品配膳台車の部品配膳エリアから所定の部品を取り出して部品組立作業を行うように指示する部品組立作業指示システムを備え、前記部品配膳台車には、一台の部品配膳台車で複数の品種の製品を組み立てることができ、且つ、使用する全ての部品配膳台車に収納する部品の全てが所定の作業時間内に製品の組み立てに使用されるように部品を振分けて収納する。
(もっと読む)
部品組立システム
【課題】自動化された部品組立システムにおいて、搬送台車の走行スペースを削減する。
【解決手段】主部品6を搬送する主部品搬送台車3が走行する主搬送路1から、副部品12を搭載して移動する副部品搬送台車4の部品投入路2を分岐・合流させる。副部品搬送台車4により、副部品12を組立ステーション9のストッカ17に補充するときは、副部品搬送台車4を部品投入路2に分岐させて、集中部品庫38から副部品12を積み込んだ後、主搬送路1へ合流させて目的の組立ステーション9へ運ぶ。
(もっと読む)
搬送装置及び搬送方法
【課題】等間隔に配列された複数のワークを、不等間隔に供給できる搬送装置を提供すること。
【解決手段】搬送装置1は、等間隔に配列された複数のワークWを把持して搬送し、任意の間隔で供給パレット7に供給し、ワークWを把持する第1把持部11、第2把持部12、第3把持部13及び第4把持部14と、これら第1把持部11〜第4把持部14が連接された把持基体部20と、を備え、把持基体部20は、第1把持部11〜第4把持部14をワークWの配列方向に相互に近接、離間させる第1摺動部210、第2摺動部220、第3摺動部230及び第4摺動部240を備え、第1把持部11〜第4把持部14は、それぞれ別個にワークWと係脱する第1係合部110a及び第2係合部110b、第1係合部120a及び第2係合部120b、第1係合部130a及び第2係合部130b、第1係合部140a及び第2係合部140bを備える。
(もっと読む)
生産システム用汎用セル及び該汎用セルを用いた生産システム
【課題】生産システムを構成する汎用セルとしての高い汎用性によってラインレイアウトの自由度を高く維持し、ひいてはライン構成の変更等に際しての時間的、コスト的なロスをより好適に削減する。
【解決手段】生産システムを構成する汎用セルとして、被加工物(ワーク)の加工に最低限必要とされる要素、すなわちロボット60が支持されたベースユニット10、ロボット60に対してワークの部品を供給する部品供給ユニット20、そしてベースユニット10の外側に延設される加工エリア30をセットとして1つの汎用セル100を構成する。ベースユニット10は、平面形状が正六角正からなって、少なくともワークの搬送に用いられるロボット60をこの正六角形からなる平面領域上を移動可能に支持する。そして、このロボット60の動作範囲を、加工エリア30の少なくとも一部を含むかたちで、ベースユニット10の内側から外側に至る範囲に設定する。
(もっと読む)
サイドメンバ組立ライン
【課題】サイドメンバの組立ラインを簡素化し、異なる車種のサイドメンバの組立を一本の組立ラインで行うことを可能とする。
【解決手段】本発明に係るサイドメンバ組立ライン100は、アウタパネル2にエクステンション4(中間部品)及びクウォーターインナ5(インナ部品)を完成品と同様の状態で仮組して仮組体1’を構成する仮組ステーション20と、仮組体1’を溶接ステーション30まで搬送する台車10(搬送手段)と、溶接ステーション30において仮組体1’からクウォーターインナ5を取り外すマテハンロボット33(保持手段)と、マテハンロボット33でクウォーターインナ5を取り外した状態で、アウタパネルとエクステンション4とを溶接する溶接ロボット31(第1溶接手段)と、マテハンロボット33でクウォーターインナ5を再びアウタパネル2に装着し、この状態でアウタパネル2とクウォーターインナ5とを溶接する溶接ロボット31(第2溶接手段)とを備える。
(もっと読む)
同期台車
【課題】本発明は、車両に対して希望する位置に同期台車を配置して、その同期台車をコンベヤと同期走行させられるようにすることを目的とする。
【解決手段】本発明に係る同期台車20は、車両を載せて搬送するコンベヤ10と同期して走行可能に構成されており、部品箱29を載せるテーブル25を備える同期台車であって、コンベヤ10に吸着可能に構成された吸着部材31と、吸着部材31をコンベヤに対する吸着位置と、コンベヤから離れた格納位置間で移動可能に支持する吸着部材支持機構30と、部品箱29がテーブル25から離れることで、吸着部材31を格納位置から吸着位置まで移動させ、部品箱29がテーブル25に載せられることで、吸着部材31を吸着位置から格納位置まで移動させる吸着部材移動機構40,50とを有する。
(もっと読む)
搬送装置
【課題】簡単な構造でコンパクトな汎用性の高い搬送装置を提供する。
【解決手段】搬送装置1は、支持手段21に支持されたトレー11の下方位置で、無端の駆動チェーン33をトレー11の循環経路に沿って走行させて、チェーン案内手段32Bによって直進動作の開始位置から終了位置まで案内し、直進動作の終了位置で駆動チェーン33の走行方向を列方向から横方向に変更し、横進動作の開始位置から終了位置まで案内し、横進動作の終了位置で駆動チェーンの走行方向を横方向から列方向に変更する。そして、トレーブロックへの押し当てが直進動作の開始位置から終了位置までの間と横進動作の開始位置から終了位置までの間で交互に行われるように複数のローラアタッチ34を駆動チェーン33に所定のピッチで設ける。
(もっと読む)
作業システム、ロボット装置、機械製品の製造方法
【課題】人手による作業のための既存の作業スペースや作業設備をできるだけ用いながら、ワークに対する作業を精度良く行なうことができるようにした作業システム及びロボット並びに機械製品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
ワーク検出装置
【課題】光源からワークまでの距離が変化する場合であっても、ワークの材質や仕様の判定を行うことができる。
【解決手段】表面の光の反射特性が異なるワーク3が複数積み重ねられ、ワーク3の取り出し毎に最上部に位置するワーク3の種類を判定するワーク検出装置1であって、ワーク3を載置するパレット6と、パレット6から所定距離隔てて配置されると共に、所定の光量でワークの表面を撮像するカメラ8−1、8−2と、ワーク3の種類及び積層高さに対応した複数のワーク3の基準画像を記憶するメモリ13と、カメラ8−1、8−2により撮像された撮像画像と基準画像との照合を行う画像処理装置9とを有することを特徴とする。
(もっと読む)
生産システム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備え、省スペース化された生産システムを提供する。
【解決手段】ワーク13と、前記ワーク13が載置されたワークストッカ12と、前記ワークストッカ12の搬出口に配置された双腕ロボット11と、前記双腕ロボット11の胴体前方に対向するように配置された第2のロボット21とから構成されたものである。
(もっと読む)
ロボットシステム及び物品加工方法並びに工業製品の製造方法
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
1 - 20 / 166
[ Back to top ]