
Fターム[3C269BB09]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584) | プログラム作成、変更時の操作 (357) | ティーチングの容易化 (119)
Fターム[3C269BB09]に分類される特許
21 - 40 / 119
ティーチングデータ作成方法およびティーチングデータ作成装置
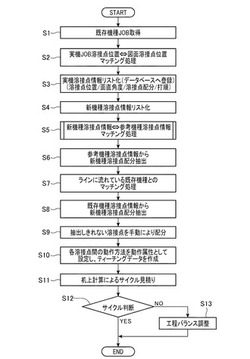
【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
アーク溶接ロボット制御装置

【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットのの動的精度を向上させ、ティーチングに要する時間を短縮する
【解決手段】ロボット2の動作を制御する制御装置3は、軸毎に指令値に対する目標軌跡と実際の動作軌跡との差をサーボ遅れ時間として計算し、その計算した軸毎のサーボ遅れ時間を比較して軸毎のサーボ遅れ時間が複数の軸の全てで一致するように基準時間を決定し、その計算した軸毎のサーボ遅れ時間と当該決定した基準時間とに基づいて軸毎の補償トルクを計算し、その計算した軸毎の補償トルクを反映した指令値を各サーボに出力してロボット2の動作を制御する。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
ロボット教示システム
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
ロボット教示装置、該装置のコントローラ、およびプログラム
【課題】教示用アームを使用する従来技術のロボット教示装置においては、教示用アームの指示具を教示しようとしている作業点に移動させようとした際、教示用アームの可動範囲を越えているために指示具が所望の作業点に届かない場合、教示作業者は、該指示具が教示しようとしている作業点に届くようロボットを動作させるために、教示用アームからプログラミングペンダントに持ち替えて手動でプログラミングペンダントを操作しなければならず、面倒であった。
【解決手段】例えば、ロボットに取り付けられた教示用アームの余裕に関係した余裕度を求め、求めた余裕度が所望の閾値以下である場合に、当該余裕が小さくならないようにロボットの動作を制御するロボット教示装置を提供する。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットのティーチング装置及びティーチング方法
【課題】ロボットを操作するための専門知識を有していなくても作業ノウハウを正確に教示すること。
【解決手段】作業者の手に装着されるモーションキャプチャ2と、モーションキャプチャから送信される3次元座標データに基づき産業用ロボット4を制御する制御部31とを備え、制御部31は、予め定められたサンプリング間隔でモーションキャプチャの位置をサンプリングし、移動距離算出機能31aと、移動速度算出機能31b、および、産業用ロボットの保持部が、ロボットの動作基点設定機能31cで設定された動作基点から移動速度算出機能31bで算出された移動速度で、サンプリングされたすべてのサンプリング点に沿って移動するように、当該産業用ロボットをティーチングする産業用ロボット制御機能31dとを有する。
(もっと読む)
レーザー加工表示装置及びこれを用いたロボットの教示方法
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワーク、スポット溶接ガン及び多関節ロボットの剛性に依存することなく、溶接ワークの対向電極側表面位置を正確に検出する。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極を溶接ワーク表面に接するように位置決めした後、サーボモータで可動電極を対向電極に接近させる方向に移動させると同時に、多関節ロボットを用いて対向電極と溶接ワークとを接近させる方向に同じ速度で相対移動させながら、可動電極の移動速度及び加速度の少なくとも一方を監視することにより、対向電極と溶接ワークとの接触を検出し、このときの対向電極の位置から溶接ワークの対向電極側表面位置を検出する。
(もっと読む)
21 - 40 / 119
[ Back to top ]