
Fターム[3C269EF59]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの作成に関する特徴 (739) | 加工経路の生成 (173)
Fターム[3C269EF59]の下位に属するFターム
加工経路の短縮 (11)
面取り、フィレットの自動付与 (2)
等高線経路、螺旋経路 (24)
オフセット経路 (30)
製品形状が特殊なもの (17)
Fターム[3C269EF59]に分類される特許
1 - 20 / 89
工具背面での切削点指令により加工を行う数値制御装置
レーザ加工方法、装置及びプログラム
【課題】加工経路を最短にした場合であっても、熱による穴径のバラツキ量を最小限に抑え、加工品質を向上させる。
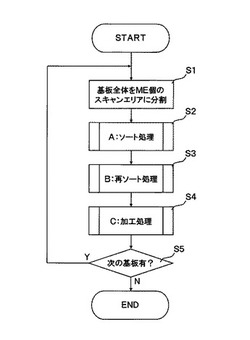
【解決手段】レーザ光を走査させる前記プリント基板を複数のスキャンエリアに分割し(S1)、スキャンエリア内の穴あけの順番を走査経路の距離が最短となるように並べ替え(S2)、並べ替えられた穴のうち、第N番目の穴と第N+1番目の穴(ただし、Nは、「1≦N≦あける穴の最大数−1」の整数)との距離が予め設定された閾値未満と判断され、かつ第N+1番目の穴が前記あける穴の最大数でないと判断された場合、第N+1番目の穴と第N+2番目の穴との順序を入れ替え(S3)、N番目の穴と入れ替えられた第N+1番目の穴との距離が閾値未満と判断された場合、第N番目の穴を加工した後、予め設定された放熱時間Tだけ加工を停止させ、その後、加工する(S4)。
(もっと読む)
自動プログラミング装置および自動プログラミング方法

【課題】簡単な操作で、回転軸を含む多軸制御による加工機での面取り加工面に近似した直交3軸制御による加工機での面取り加工の工具経路を生成し、操作時間が短縮でき加工能率が向上する自動プログラミング装置および自動プログラミング方法を得る。
【解決手段】加工領域形状データと予め記憶されている加工条件データとに基づいて工具パスデータを生成する際に基準とする基準点列の形状データを生成する基準点列生成部121と、基準点列の形状データと予め記憶されている加工条件データおよび使用工具データとに基づいて面取り加工工具が面取り加工を施しながら通過する際の工具位置を決定するための工具基準位置データを生成する工具基準位置生成部122と、工具基準位置データと予め記憶されている使用工具データとに基づいて面取り加工工具の工具パスデータを生成する工具パス生成部123とを備える。
(もっと読む)
工具経路生成装置及び方法
【課題】複数の工具を用いて加工を行う場合に、工具への負荷を軽減できる工具経路生成装置及び方法を得ること。
【解決手段】複数の工具の各々に関して加工を行うことが可能な凸部の最小曲率半径を決定する最小曲率半径決定部4と、複数の工具の中から加工に使用する選択工具を選択する工具選択部3と、現在までに工具経路生成の対象となっていない工具経路未生成領域から、凸部の曲率半径が工具選択部が選択した選択工具に関しての最小曲率半径以上となる工具経路生成対象領域を除去した部分を、新しく工具経路未生成領域として記憶する加工領域抽出部5と、選択工具の情報とポケット加工における加工条件とから、選択工具が工具経路生成対象領域の凸部に内接するように、工具経路生成対象領域に対する工具経路を生成する工具経路生成部7とを備える。
(もっと読む)
工具経路算出装置、工具経路算出方法、及び加工装置
【課題】研削工具(砥石)を持つ加工装置の制御に係わり、工具の磨耗に対処して好適な経路を算出し、費用等を抑える。
【解決手段】本工具経路算出装置10は、加工装置20での研削中に工具に生じる磨耗を考慮した経路を算出する機能を有する。処理部201は、被削材と工具との組合せについて、(1)第1の研削加工(試加工)の結果データに基づき、研削諸元値と工具磨耗量との関係情報を含むデータをDB50に格納する処理と、(2)第2の研削加工(実加工)を行うためのNCデータ52を生成する際に、当該研削諸元値と、DB50とをもとに、第2の研削加工の工具磨耗量を算出する処理と、(3)工具の磨耗を考慮しない経路に対し、上記第2の研削加工の工具磨耗量を反映して補正した工具の経路を算出する処理とを行う。
(もっと読む)
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
数値制御装置
【課題】加工プログラムに射影工具軸ベクトルの向きが急変するような移送対象物の動きを指示する部分が含まれている場合でも、工具とテーブルとの相対的な急回転を防いでワークの加工精度の低下及び機械ショックの発生を抑制する。
【解決手段】数値制御装置2は、姿勢調整箇所の前後に亘る姿勢調整区間において工具106の姿勢を調整するための姿勢調整情報を求める姿勢調整情報導出部16と、媒介変数時間関数を求める媒介変数時間関数導出部18と、媒介変数時間関数から求めた各時点に対応する媒介変数のうち姿勢調整区間内の媒介変数については、先端パス上の先端点の位置座標と、その先端点から当該先端点に対する位置関係を姿勢調整情報に基づいて射影工具軸ベクトルの向きの変化が緩やかになる方向に調整した上空パス上の上空点へ向かう工具軸ベクトルを求めてその位置座標及び工具軸ベクトルから指令パルスを求める移送指令導出部20とを備える。
(もっと読む)
加工装置および加工方法
【課題】ワークの加工精度を向上した加工装置を提供する。
【解決手段】ワーク5と工具10との相対運動によって、ワーク5に対して曲線を含む加工を施す加工装置1であって、ワーク5と工具10とが接触するまでの相対運動をクロソイド曲線に沿った運動に制御する制御手段4を備える。
(もっと読む)
工具通過領域モデリング方法
【課題】工具通過領域の形状の定義不能状態を極力回避可能とし、円弧部を含む工具通過領域のモデリング時間の短縮を可能とする。
【解決手段】工具通過領域モデリング方法において、工具経路を直線部と円弧部に分割する(301)。円弧部については、工具経路の内側と外側とに分割し、各々工具経路に沿って工具断面形状をスイープして工具通過領域を作成(303〜305)した後、各工具通過領域を連結して円弧部の工具通過領域を作成する(307)。円弧部について工具経路の内側と外側とに分割して円弧部の工具通過領域を作成する(303〜305)ことで、円弧部における工具通過領域の形状の定義不能状態を極力回避する。
(もっと読む)
加工プログラムの移動経路を修正する機能を備えた数値制御装置
【課題】ピックフィードが切削部分にある加工プログラムの場合でも、良好な加工面を得ることができる数値制御装置。
【解決手段】プログラム入力部2は、自動運転の実行時に加工プログラム1を読み出し、指令解析部3に入力する。指令解析部3は、指令ブロック毎の移動量や送り速度の指令から補間用のデータを生成する前処理部であり、前処理されたデータは、補間処理部7に入力され、各軸の移動指令に分割された後、各軸のサーボモータ8X,8Y,8Zに出力される。指令解析部3の内部において、ベクトル作成部4は、同一方向の連続する指令ブロックを一つにしたベクトルを作成し、ピックフィード判定部5に入力する。ピックフィード判定部5では、入力されたベクトルからピックフィード部分かどうかの判定が行われ、ピックフィード部分であった場合には、経路修正部6で経路の修正が行われる。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム
【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
加工パスの生成方法及び加工方法
【課題】製品設計の3次元CADモデル(以下3D−CADと称する)から,割り落とすことが可能な形状を自動判断し,その割り落とす加工方法の加工パスを自動生成し,製品の加工時間を短縮し,工具摩耗を低減できるようにする。
【解決手段】素材の一部を切削により削除する加工パスを生成する加工パス生成方法を、設計情報を用いて素材の削除する領域を素材に対して第1の方向から切削加工する第1の加工パスを作成する第1の加工パス生成工程と、設計情報を用いて素材の削除する領域を素材に対して第2の方向から第1の方向の側の面よりも下の部分を切削加工する第2の加工パスを作成する第2の加工パス生成工程とを有して構成した。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
数値制御情報作成装置
【課題】削り残しの除去加工のための数値制御情報がより効率的に生成でき得る数値制御情報作成装置を提供する。
【解決手段】第一回転工具での削り残し領域を、第一回転工具より小径の第二回転工具で除去加工する数値制御情報を作成する場合、第一工具での加工範囲を第二工具半径分だけ内側にオフセットした第一形状と、指定形状を取代と第二工具半径との和でオフセットして第二形状と、を算出し、前記第二形状から第一形状を除外して残った追い込み加工形状を生成する。そして、この追い込み加工形状のうち第二形状に由来する要素のみを順次、内側にオフセットする。そして、このオフセット形状および追い込み加工形状に沿って移動する第二回転工具の移動軌跡を求める。
(もっと読む)
工作機械、加工方法、プログラム及びNCデータ生成装置
【課題】断面非円形状のワークと工具との相対移動により、少なくともワークの断面を含む一平面内においてワークと工具との相対的位置及び相対的角度を変化させつつ、加工を行い、ワークに対する工具の傾きの角速度を一定にし、切削送り速度を一定に保つ。
【解決手段】ワーク50上の所定の経路に沿って加工する際、所定の経路上にて工具8による加工が開始される点Psから加工が終了する点Peまでの、ワーク50と工具8との相対的角度変化の総和θseを算出すると共に、所定の経路に沿った加工に要する時間を、工具経路へ等分に配分し、工具8が工具径路上の各時間的等分点を通過する際に、工具8とワーク50との相対角度が、相対的角度変化の総和θseを加工に要する時間と同等に等分した角度分ずつ連続的に変化するように加工を行う。
(もっと読む)
工作機械の制御システム
【課題】事前に工作機械の最適な切削送り速度を算出して、工具経路と算出した最適な切削送り速度とを工作機械の駆動部に直接出力し、ワークと工具とを、工具経路に沿って工具経路の各部における最適な切削送り速度で相対的に移動させる。
【解決手段】形状データに基づいて、工具経路を含むCLデータを生成するCLデータ生成部32と、CLデータを記憶するCLデータ記憶部33と、工作機械4の駆動部6の駆動能力に関する駆動能力データを予め記憶している駆動能力データ記憶部34と、CLデータと駆動能力データとに基づいて、CLデータの工具経路の各部における切削送り速度データを生成する切削送り速度データ生成部35と、切削送り速度データを記憶する切削送り速度データ記憶部36と、CLデータと切削送り速度データとを駆動部6に出力する制御部42とを備える。
(もっと読む)
ロボットの制御装置及びロボットの姿勢補間方法
【課題】ロボットの手先がワークを把持して加工を行う場合の作業精度を向上させる。
【解決手段】制御装置は、手先の先端点を座標原点とするX方向,Y方向,Z方向の各軸について、手先の位置及び姿勢をティーチングする場合に、座標原点から各軸方向の所定距離に手先の姿勢を定める姿勢点を設定すると、ティーチングした姿勢に対応する姿勢点の間について、各軸の姿勢点の移動軌跡がそれぞれ滑らかに繋がるように補間する。
(もっと読む)
1 - 20 / 89
[ Back to top ]