
Fターム[3D034BC03]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構 (1,407) | 操舵操作機構とリンク機構との関連 (186)
Fターム[3D034BC03]に分類される特許
41 - 60 / 186
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 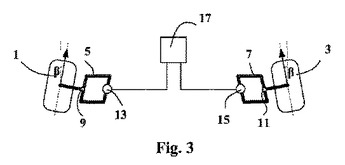 (もっと読む)
(もっと読む)
車両用ステアリング装置
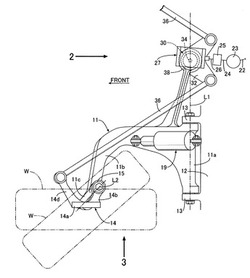
【課題】 簡単な構造でバンプステア現象の発生を最小限に抑えることが可能な車両用ステアリング装置を提供する。
【解決手段】 ステアリングホイールを操作すると等速ジョイント30を介して接続されたピットマンアーム32が回転し、ピットマンアーム32にタイロッド36を介して接続されたナックル14がキングピン軸L2まわりに揺動して前輪Wが転舵される。等速ジョイント30をリーディングアーム11の揺動軸L1上に配置し、かつ等速ジョイント30の出力軸34を支持するシャフトホルダ38と左右一方のリーディングアーム11とを連結部材39で一体に連結したので、リーディングアーム11が上下に揺動するとシャフトホルダ38と共にピットマンアーム32も一体に上下に揺動し、リーディングアーム11とピットマンアーム32との位置関係が一定に保たれるため、ナックル14がタイロッド36で押し引きされるのを防止してバンプステア現象が回避される。
(もっと読む)
障害物回避支援装置

【課題】乗員に違和感を与えることなく、又は、与える違和感を少なくして車高を上げることが可能な障害物回避支援装置1aを提供する。
【解決手段】車高調整装置9を制御して車高を調整し、車両Cに障害物を跨いで回避させる障害物回避支援装置1aにおいて、車両Cの状態量に応じて、障害物を跨ぐ際の車高を変化させ、車両Cが旋回中には、車両Cの車輪11、21の舵角を調整する舵角制御装置1bを制御して、障害物に内輪近傍を通過させ、車高を変化させる際には、車両Cの後輪21の舵角を調整する舵角制御装置1bを制御して後輪21をトーインにする。
(もっと読む)
車両制御装置
【課題】RTCの制御と左右前輪の駆動力配分の制御とを組み合わせて、車両の安定化と旋回のしやすさとを併せて実現させることができる車両制御装置を提供する。
【解決手段】低速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより増加し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより減少することにより、走行中の車両の旋回性能を向上させる。また、高速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより減少し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより増加することにより、走行中の車両の安定性能を向上させる。
(もっと読む)
車両用ステアリング装置
【課題】 ホイールと車体との干渉を抑制しつつ操舵角の増大を実現できる車両用ステアリング装置を提供する。
【解決手段】 アッパステアリングギヤ12uは、アッパフレーム2の上面に前後動自在に保持された第1スライダ21および第2スライダ22と、第1スライダ21を前後に駆動する第1スライドアクチュエータ23と、第2スライダ22を前後に駆動する第2スライドアクチュエータ24と、第1スライダ21の後端に設置されたスイングアクチュエータ25と、第1スライダ21の後端とスイングアクチュエータ25とナックル11の上面後部とに連結された第1ステアリングアーム26と、第2スライダ22の前端とナックル11の上面前部とに連結された第2ステアリングアーム27とを主要構成要素としている。
(もっと読む)
後輪操舵装置
【課題】直進状態のカント路走行時において修正操舵による負担を解消する。
【解決手段】カーナビゲーションからの直進路情報RS信号により直進路走行を判定する直進判定部22と、操舵角θsと車速Vとに基づいて、基準ヨーレイトγfを求めるフィードフォワード部23と、規範ヨーレイトγsを求める規範モデル部24と、規範ヨーレイトから実ヨーレイトγを減算するコンパレータ25と、基準ヨーレイトにコンパレータの結果を加算する加算器27と、加算値に基づいて後輪転舵角δrを求めて駆動制御するアクチュエータ駆動制御部28とを設ける。直進状態のカント路走行時に直進させるべく操舵した場合に、操舵角に応じて後輪を転舵することにより、操舵角を0にしても車両を直進させることができるため、運転者はステアリングホイールをハンドルセンター位置にした操舵力を必要としない楽な状態で直進路を走行することができる。
(もっと読む)
リアトー制御装置
【課題】車両が所定の種類の施設の位置にあるときは、運転者の駐車操作を支援するように後輪のトー角を設定するリアトー制御装置を提供する。
【解決手段】駐車場や洗車場など、車両Vを駐車する施設を所定の種類の施設とする。車両Vのナビゲーション装置8は、車両Vの位置が所定の種類の施設の位置と一致したこと、又は車両Vの位置が所定の種類の施設の位置の近傍であることを検出すると、車両制御ECU10にナビゲーション信号Nsを入力するように構成する。そして、車両制御ECU10は、ナビゲーション信号Nsが入力されたら、左右の後輪2L,2Rをトーインにする指令を、トー角変更制御ECU37を介してアクチュエータ30に与え、アクチュエータ30が動作して左右の後輪2L,2Rをトーインにする。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時の乗り心地を改善することができる車両の後輪操舵制御装置を提供する。
【解決手段】 車体1と後輪3rl,3rrとの間に介装され、伸縮することによって後輪3rl,3rrのトー角を変更する電動アクチュエータ8を備えた車両の操舵制御装置6であって、車両Vが走行している路面の状態を推定する路面状態推定手段(路面状態推定部63)を有し、路面状態推定手段63によって悪路判定がなされた場合、アクチュエータ8を中立状態に維持することを特徴とする。
(もっと読む)
ボールジョイントの製造方法
【課題】高温の溶融材料がシート部材に与える熱影響を低減できるボールジョイントの製造方法を提供する。
【解決手段】ボールジョイントを製造する場合、まず、ボール部となる球体51の外周側にシート部材6を組み付けることによりシート付球体52を得る。次いで、ハウジングの略凹型形状の連結部の孔部を形成する形状の凸部55を有する型56内にシート付球体52をセットする。その後、型56内に溶融材料をその一部が凸部55に当たってからシート付球体52の外周側に流れ込むように供給し、ハウジングを成形する。
(もっと読む)
操舵装置
【課題】操舵ハンドルの操作に応じてアクチュエータを作動させて車輪を操舵する操舵装置において、走行安定性を向上させること。
【解決手段】端部に車輪30a,30bが連結されたロッド9a,9bと、操舵ハンドルの操作に応じて作動してロッド9a,9bを移動させることによって車輪30a,30bを操舵するアクチュエータ1とを備える操舵装置100において、アクチュエータ1は、車体に揺動自在に支持され、かつロッド9a,9bを軸方向に移動させる第1アクチュエータ10と、第1アクチュエータ10を揺動させ、その揺動に伴ってロッド9a,9bを上下方向に移動させる第2アクチュエータ20とを備える。
(もっと読む)
ステアリング装置
【課題】四輪車両において、位相調整およびトー角調整可能な非円形歯車組式ステアリング装置を提供する。
【解決手段】操舵力は入力軸8aから減速機8に至り、これによる減速後に転舵軸設定部材側非円形歯車7および車輪支持部材側非円形歯車6を経て車輪支持部材2に達し、これを介して転舵輪1が転舵軸中心01の周りに転舵される。かかるステアリング装置の車体組み付け後のトー角調整に際しては、ステアリングホイールを含む回転系と、減速機入力軸8aとの回転位相を調整して両者を一体結合させ、この位相調整中における非円形歯車組6,7の回転に伴う転舵輪支持部材2および転舵輪1の非転舵中立位置からのずれ(トー角のずれ)を、ナット12の回転による伸縮部材11の伸縮で転舵軸設定部材3の対応方向への回転を介してゼロとなるようにする。
(もっと読む)
車両運動制御システム
【課題】車両の旋回運動時にアンダステア状態またはオーバステア状態になったとき、スムーズな旋回運動に移行ができる車両運動制御システムを提供する。
【解決手段】車両用ブレーキ液圧制御装置の制御機能部であるVSA制御部は、車両の旋回状態がアンダステア状態であるか否か、また、車両の旋回状態がオーバステア状態であるか否かを判定する。VSA制御部は、車両の旋回状態がアンダステア状態と判定したときは、旋回内側の車輪に制動力を付与し、後輪トー角制御部が、VSA制御部のこの判定を受けて、旋回外側の後輪をトーインに設定する。VSA制御部は、オーバステア状態と判定したときは、旋回外側の車輪に制動力を付与し、後輪トー角制御部が、VSA制御部のこの判定を受けて、旋回内側の後輪をトーインに設定する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 車輪を転舵する転舵モータが失陥しても、トー角調整用モータを転舵の駆動源に転用して転舵を行うことができるステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用の操舵軸10と機械的に連結されないステアリングホイールと、操舵角センサと、操舵反力モータと、転舵モータおよび操舵反力モータを制御するステアリング制御部とを備える。転舵モータ6から操舵軸10に動力を伝達して転舵を行なわせる転舵動力伝達機構18のほか、トー角調整用モータ7から操舵軸10に動力を伝達してトー角調整を行なわせるトー角調整動力伝達機構28を設ける。転舵モータ6が失陥したとき、転舵モータ6の転舵動力伝達機構18からの切り離し、トー角調整動力伝達機構28の固定、トー角調整用モータ7による転舵を行なわせる切換手段17を、転舵動力伝達機構18およびトー角調整動力伝達機構28の途中部分に設ける。
(もっと読む)
アライメント制御装置
【課題】直進する車両が最良の燃費で走行可能なホイールアライメントに設定できるアライメント制御装置を提供することを課題とする。
【解決手段】直進する車両Vに適したホイールアライメントを判定する車両制御ECU10と、左右の後輪2L,2Rのトー角を変更可能なトー角変更装置120を備えるアライメント制御装置とする。そして、車両制御ECU10は、左右の後輪2L,2Rのトー角が、制駆動力が発生していない状態で車両Vが直進するときに速度低下率が最も低くなるトー角に設定されるホイールアライメントを、直進する車両Vに適したホイールアライメントと判定することを特徴とする。
(もっと読む)
運転支援システム
【課題】 運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】 車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの外側に傾斜され、運転者に対する走行レーンの視覚を、ずれ方向と逆方向に傾けて認識させ、車両のずれを修正する状態に運転者に操舵を促す。
(もっと読む)
運転支援システム
【課題】運転者が煩わしさを感じることがなく、しかも、簡単な制御で走行車線内での車両の走行を維持する。
【解決手段】運転集中状態にない時に車両1に横ずれが生じた場合、車両1のずれ量に応じてアクチュエータ15が動作されて車両1が走行レーンの内側に傾斜され、走行レーンの内側に移動する力を車両1に発生させ、車両1を走行レーンの内側に移動させる。
(もっと読む)
ロッド接続構造
【課題】ロッドの座屈方向を特定することができるロッドユニットを提供する。
【解決手段】タイロッド14は、第1ロッド24、第2ロッド25および座屈部材46を備えている。座屈部材46は、第1ロッド24と第2ロッド25とを同軸に接続している。座屈部材46は、鋼製の長尺部材であり、略円筒形状に形成されている。座屈部材46の中間部分には、座屈部としての楕円筒部53が形成されている。この楕円筒部53は、横断面形状が外郭楕円形をなしている。座屈部が楕円筒部53によって形成されているので、タイロッド14に過大な荷重が加わった際には、楕円筒部53がその短軸方向である二方向のいずれかに向けて座屈し易い。
(もっと読む)
レーンキープ又はレーン逸脱防止システム
【課題】車両挙動の安定を確保しながら、走行レーンからの逸脱を抑制してレーンキープすること。
【解決手段】ステアリングハンドル3による操舵を電動機4で補助し、前記ステアリングハンドル3の操作角に対する前輪1L、1Rの転舵角との舵角比を変化させる舵角比可変機構113を有する電動パワーステアリング装置110と、後輪2L、2Rのトー角を変更可能とするトー角変更装置120L、120Rと、走行レーンをキープする際に設定される目標とのずれを判定する操舵制御ECU130と、操舵制御ECU130の判定結果に基づいて、前記舵角比可変機構113の舵角比及び前記後輪2L、2Rのトー角をそれぞれ制御する。
(もっと読む)
車両操舵装置
【課題】運転者が走行中に自車の後輪のトー角状態を把握でき、後輪トー角の制御に運転者の意図を反映することが可能な車両操舵装置を提供する。
【解決手段】少なくとも前輪の転舵角及び車速に基づいて左右の後輪のトー角を変更可能とするトー角制御装置を備えた車両操舵装置において、左右の後輪のトー角状態を運転者に視覚的に提示する提示手段を備え、機能中の後輪トー角の制御モードを説明するメッセージを出力する機能を備えた。さらに、運転者が後輪トー角を手動で操作する操作手段を備えた。
(もっと読む)
車両ステアリング制御装置
【課題】スプリットμ路の路面状態と後輪操舵機能の故障時のトー角の方向とに応じて、ステアリング制御装置に最適な制御を行わせる車両ステアリング制御装置を提供する。
【解決手段】後輪操舵装置120が故障して故障フラグが1になるとスイッチ119aがONする。このとき、スプリットμ路における路面左右μ差信号と後輪操舵装置120の故障時の後輪舵角信号とが操舵方向決定部114に入力されてそれぞれの極性が比較される。ここで、路面左右μ差が右側高μ(+)であって、後輪舵角が左側(−)に傾いているときは、スプリットμ補正ゲインマップ117により補正ゲインを1より大きくし、スプリットμ制御部113の出力のスプリットμ制御信号に乗算して電動機4を制御する。これにより制動時における車両の走行方向を安定化させることができる。路面左右μ差信号と後輪舵角信号との極性比較により補正ゲインを増減させてスプリットμ制御を行う。
(もっと読む)
41 - 60 / 186
[ Back to top ]