
Fターム[3D041AB00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、適用車種 (2,040)
Fターム[3D041AB00]の下位に属するFターム
一般車両 (1,682)
農業車両 (55)
建設、土木、産業車両 (40)
Fターム[3D041AB00]に分類される特許
21 - 40 / 263
車両用動力伝達装置の制御装置
【課題】電気式差動部を備える車両用動力伝達装置において、全体効率を一層向上して燃費向上を図る。
【解決手段】差動部11を備える動力伝達装置10の電子制御装置80において、電気パス効率の変化可能量とエンジン動作点の変化可能量とに基づいて、車両のシステム効率が最大となるように、電気パス効率及びエンジン動作点が変化させられるので、例えばエンジン8の暖機状態、第3電動機M3の温度状態などの車両状態に基づいて変化可能量が変えられる電気パス効率及びエンジン動作点に合わせて車両のシステム効率が可及的に向上させられる。よって、システム効率を一層向上して燃費向上を図ることができる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジン運転モードの切り替え時、要求駆動トルクを実現しつつ、エンジントルクの増減に伴うトルク変動が駆動輪へ伝達するのを抑制し、段差ショックの発生を防止することができるハイブリッド車両の制御装置を提供すること。
【解決手段】駆動系に、運転モード切り替え装置を有するエンジンEngと、モータジェネレータMGと、第1クラッチCL1と、第2クラッチCL2と、を備えている。このハイブリッド車両において、運転モード切り替え制御手段(図2)は、通常運転モードから燃費運転モードへの切り替え時、第2クラッチCL2のトルク伝達容量を、要求駆動トルク相当まで低下させ、モータジェネレータMGにより回転速度差を保つスリップ締結制御を行い、燃費運転モードから出力燃費運転モードへの切り替え時、第1クラッチCL1のトルク伝達容量を、要求駆動トルク相当まで低下させ、モータジェネレータMGにより要求駆動トルクの増減を調整する制御を行う。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】変速時に運転者に違和感を与えることのないハイブリッド車両の変速制御装置を提供する。
【解決手段】第1回転要素にエンジンが接続され、第2回転要素に第1モータジェネレータが接続され、第3回転要素に駆動軸が接続された動力分配装置と、前記駆動軸に駆動力を伝達する第2モータジェネレータと、前記駆動軸と前記第2モータジェネレータとの間に介在され、変速時にクラッチを解放する有段式の変速機と、前記第1モータジェネレータ及び第2モータジェネレータとの間で充放電を行うバッテリと、を備え、バッテリに充電制限がかかっているときに変速機の変速要求があるときは、変速前にエンジン及び第1モータジェネレータの分担トルクを低下させ、第2モータジェネレータの分担トルクを上昇させ、その後、前期クラッチを開放して変速を行う変速制御手段を備えた。
(もっと読む)
車両の駆動力制御装置
【課題】車両が低車速かつ大舵角旋回をおこなう場合に最大ヨーモーメントを発生させる駆動制御装置を提供すること。
【解決手段】車速が所定車速以下かつ操舵角が所定角以上で車両Veが旋回をおこなう場合に、車両重心点P周りに最大ヨーモーメントMを発生させるように、車両Veの駆動トルクが制御されるとともに、最適な操舵角θが操舵輪に与えられるように構成されている。アッカーマンステアリングジオメトリが考慮されて駆動輪が出力する駆動トルクが制御され、また、最適な操舵角θが与えられるので、車両Veの最小旋回半径を低減させることができる。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
ギアシフトの間にエンジントルクを制御する方法
【課題】最も円滑なギアシフトを実現にするために、変速装置と連動する必要条件が、ドライバによって課せられる必要条件に優先することを可能にすること。
【解決手段】自動式ギア比シフトを有するギヤボックスを備えている自動車に関し、コントロールユニット20が、アクセルペダル24から来るトルク要求情報を基礎としてエンジン運転モード10を制御し、そして、エンジン制御は、ギアボックス16のコントロールユニット22によって伝達されるデータを基礎として修正されることが可能である。自動車の特定の作動位相に対して、ギアボックス16コントロールユニット22は、コントロールユニット20が従属されるエンジン制御コマンドを置き換えるトルク要求情報の作動を禁止する。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法
【課題】変速の有無に関係なく、応答良く車両を減速出来る車両の制動制御を課題とする。
【解決手段】変速機ATがコーストフリーの変速段の状態でアクセルオフを検出すると、変速の有無に関係無く、車両減速のための制動を制動装置BRKを介して車輪に付与する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】コースト走行時に跳びダウン変速が実行されるに際して、出力軸トルクのトルク変動を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】自動変速部20のコースト走行中に跳び変速が実施されるに際して、自動変速部20の入力軸回転速度が中間変速段の同期回転速度付近になると、緩変化制御手段88は、入力軸回転速度の変化速度を緩和させるため、入力軸回転速度が中間変速段の同期回転速度付近に達したときに、係合装置の摩擦材間の引き摺りによって生じる引き摺りトルクが低減される。したがって、自動変速部20の出力軸22のトルク変動を低減することができ、ドライバビリティーを向上させることができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】コースト走行時にエンジンフリクショントルクが回生トルクに加えて付与されているときの変速部の変速に際して、フリクショントルク及び回生トルクをブレーキトルクに置き換えるときの制御性を向上する。
【解決手段】コースト走行時にエンジンフリクショントルクが第2電動機M2による回生トルクに加えて付与されているときには、制動力協調制御手段94による制動力協調コーストダウン制御により、フリクショントルク分が一時的に回生トルクに置き換えられ、その後、回生トルク分がホイールブレーキ装置40によるブレーキトルクに置き換えられるので、フリクショントルク及び回生トルクの2自由度を持ったままでのブレーキトルクへの置換えに比べ、回生トルクへの一本化によりブレーキトルクへの置換えが容易になる。また、何れのトルクの置換えもフリクショントルクやブレーキトルクよりも制御性の良い電動機トルク(回生トルク)を介して行われる。
(もっと読む)
車両の駆動力制御装置及びその方法
【課題】主駆動輪のスリップ時に従駆動輪を最適に制御することである。
【解決手段】車両の駆動力制御装置は、主駆動輪がスリップしたらモータの駆動によって従駆動輪を駆動するものであり、主駆動輪の駆動力とモータ4の駆動によって駆動される従駆動輪の駆動力との加算値として車両総駆動力を算出し(ステップS690)、車両総駆動力の増加方向に主駆動輪のスリップ状態を制御する(ステップS700、ステップS710、ステップS720)。
(もっと読む)
車両走行制御方法
【課題】
車両の走行中に有している運動エネルギーの最大限の有効活用による車両走行に必要なエネルギーおよび排出ガス量の削減。
【解決手段】
車両の現地点から車両停止地点までの距離情報、あるいは車両の現地点から交差点までの距離情報および交差点信号の信号状態変移情報を知って、車両停止点での停止あるいは交差点での青信号・無停止通過のための減速を車両が現地点で有している運動エネルギーを活用することによって、即ち惰性走行を最大限に利用することによって、おこなう。また渋滞中においては車両の発進・加速を効率的に行い、発進・加速の結果車両が獲得した運動エネルギーを有効活用しての惰性走行によって省エネルギー・排出ガス量削減走行をおこなう。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】有段変速部を有する車両用動力伝達装置の制御装置において、変速ショック発生の可能性を低減できる車両用動力伝達装置の制御装置を提供する。
【解決手段】トルク補償手段72は、トルク相補償制御において、変速指示に基づいて決定したトルク補償開始時期で第2電動機M2の作動により出力トルクTOUTの変動(落込み)の抑制を開始する場合には、係合装置の油圧値PCXに基づいて上記トルク補償開始時期を決定する場合と比較してトルク補償率を小さくする。ここで、上記変速指示基準で上記トルク補償開始時期が決定されると出力トルクTOUTの落込みと前記トルク相補償制御の進行との間に時間的なずれが生じる可能性がある。従って、その時間的なずれが生じたとしても、変速ショックが大きなること無く変速ショック発生の可能性を低減できる。
(もっと読む)
動力装置
【課題】左右の被駆動部の回転を容易に精度良く制御できることで、ドライバビリティを向上させることができる動力装置を提供する。
【解決手段】動力装置1では、互いの間で動力を伝達可能で、動力の伝達中、互いの間に回転数に関する共線関係を保ちながら回転し、その速度共線図において順に並ぶように構成された第1要素S1、第2要素C1、R3、第3要素R1、R2、C3、第4要素C2、S3および第5要素S2はそれぞれ、第1回転機11の第1ロータ13、左右の被駆動部WFL,WFRの一方、原動機3の出力部3a、左右の被駆動部WFL,WFRの他方、および第2回転機21の第2ロータ23に機械的に連結され、第3回転機31の第3ロータ33は、原動機3の出力部3aに機械的に連結されており、第1回転機11と第3回転機31、および、第2回転機21と第3回転機31はそれぞれ、互いに電気的に接続されている。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】所定の回転部材の回転中に変速比を変更可能な変速部を備える車両用動力伝達装置において、モータ走行から車両停止した際の再発進性能の低下を抑制する。
【解決手段】モータ走行の際に、無段変速機20の変速応答性に基づいて最大変速比γmaxが変更されたり、走行路面の摩擦係数μに基づいて最大変速比γmaxが変更されたり、蓄電装置68の出力制限に基づいて最大変速比γmaxが変更されたり、或いは無段変速機20の出力軸回転速度NOUTに基づいて最大変速比γmaxが変更されるので、モータ走行の際にエンジン8が始動させられる場合にモータ走行からエンジン走行への切換えがスムーズ(速やか)に行われたり、或いはまた無段変速機20の効率を向上できると共に、モータ走行から車両停止した際の再発進性能の低下を抑制することができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機によって差動状態が制御される電気式差動部と、動力伝達経路の一部を構成する変速部とを、備えた車両用動力伝達装置において、エンジン始動時に発生する歯打ち音の発生を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】変速比設定手段92は、エンジン停止時の第2電動機M2による走行中の自動変速部20の変速比を、第1電動機M1によってエンジン8を始動させるときの第1電動機M1の電圧波形に応じて設定するため、自動変速部20のギヤ比が好適に設定され、第1電動機M1によるエンジン始動時の歯打ち音を抑制することができる。
(もっと読む)
ハイブリッド車両
【課題】短時間で停止状態から車両の走行を開始させることができるハイブリッド車両を提供することにある。
【解決手段】内燃機関及び電気モータと、駆動輪と、複数の変速段及び入力軸を備え、入力軸と駆動輪とを係合させることが可能な変速機構及び、内燃機関の機関出力軸と入力軸とを係合させることが可能なクラッチを含み、入力軸が、電気モータのロータとも係合している変速機と、出力を変化可能な補機と、各部の動作を制御する制御手段と、を有し、制御手段は、停止状態から発進する場合に、クラッチを半係合状態とし、電気モータの回転数を低下させた後に、複数の変速段のいずれか1つを係合状態とし、その後、電気モータの駆動力を駆動輪に伝達させることで上記課題を解決する。
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
ハイブリッド車両
【課題】アクセル操作が行われていない場合に、駆動力抜けを生じさせることなく、内燃機関を始動させることが可能な、デュアルクラッチ式変速機を備えたハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、アクセル操作が行われていないときに、電気モータ50から出力される機械的動力のみを駆動輪88に伝達して当該駆動輪88に生じるモータ駆動力により車両を駆動するクリープ走行を行わせることが可能なものである。ECU100は、ブレーキ操作が行われている場合には、電気モータ50の力行を停止して、第1変速機構30の変速段31,33,35を全て解放状態にする。一方、ブレーキ操作が行われていない場合には、車速が、予め設定された目標車速以上となるように、モータ駆動力(クリープ走行駆動力C)を設定して電気モータ50を力行させる。
(もっと読む)
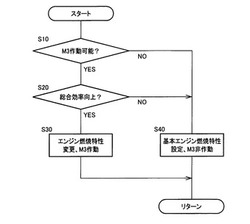
車両の制御装置
【課題】路面状態に応じた走行モードの切替中におけるドライバビリティの悪化を防止し、かつ、従来の車両に低コストで追加可能な、動力分配機構と連携した電子制御を行う車両の制御装置を提供すること。
【解決手段】ECUのCPUは、走行モードの入力があった場合(ステップS13でYes)、入力された走行モードに応じて動力分配機構の切替を指示し(ステップS14)、動力制御機構については、記憶した走行モードに応じて制御を行う(ステップS15)。動力分配機構の切替が完了したと判定した場合には(ステップS16でYes)、入力された走行モードに応じて、動力制御機構の特性を切り替えるが、動力分配機構の切替を指示してから、切替が完了しないまま一定の時間が経過したと判定した場合には(ステップS18でYes)、動力制御機構の特性を、記憶した走行モード(ステップS12)に対応する特性に維持する(ステップS19)。
(もっと読む)
車両の制御装置
【課題】車輪速センサの故障時に差動装置を過度な負荷から保護することができる車両の制御装置を提供する。
【解決手段】駆動制御ECUは、車輪速センサの故障時において、エンジン回転数センサおよびモータジェネレータの回転数センサから入力される信号に基づき、差動装置の入力回転数RevFinを算出する(ステップS11)。そして、差動装置の入力回転数RevFinが、差動装置において許容される左右の車輪の回転数差から求められる上限値を超えないよう、駆動力発生装置を制御する(ステップS13)。
(もっと読む)
21 - 40 / 263
[ Back to top ]