
Fターム[3D041AC18]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 変速装置 (1,781) | 有段変速 (425)
Fターム[3D041AC18]に分類される特許
81 - 100 / 425
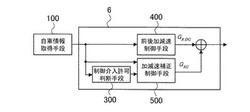
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
車両の速度制御装置

【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
周辺車両監視装置及び周辺車両監視方法
【課題】交通事故の発生をより高い確率で抑止し、運転者のストレスを低減する。
【解決手段】自車両と先行車両との間に一定の車間距離があり、自車両の隣接車線を走行する周辺車両が自車両の斜め前方を走行している状況において、周辺車両の挙動から該当周辺車両が自車両と先行車両との間に割り込みを行うと予測される。そして、運転者に対して割り込みの可能性が報知されるとともに先行車両との車間距離を更に取る様にアドバイスされ、状況によっては自車両の制動制御が自動的に行なわれる。この様にして、周辺車両の微妙な挙動から起こりうる危険な状況を予測して未然に回避することによって、運転者の交通事故回避に対するストレスを軽減させ、交通事故の防止を図ることができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機と、その電動機に動力伝達可能に連結された変速部とを備える車両用動力伝達装置において、回生制御中に変速が実施されるに際して、トルク相中に発生する引き込み感を減少することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】回生制御手段実行中に自動変速部20の変速が実施されるとき、回生制御手段94は、自動変速部20のトルク相中において、自動変速部20への回生トルク(入力負トルク)を減少させるため、トルク相中に発生する回生トルク(入力負トルク)によって生じる引き込み感を減少させることができる。
(もっと読む)
車両の制御装置
【課題】複数の要求値の調停処理を繰り返して制御目標値を設定する車両において、要求値の追加あるいは削除を行なう際の調停処理ロジックの変更量を低減する。
【解決手段】この制御装置は、PDRM9010および複数の駆動力要求システム(9030〜9033)からの要求駆動力を調停する駆動力調停部9020と、ギヤ段変換部9110および複数のギヤ段要求システム(9130〜9132)からの要求ギヤ段を調停するギヤ段調停部9120と、トルク変換部9210および複数のトルク要求システム(9230、9231)からの要求トルクを調停するトルク調停部9220とを備える。さらに、この制御装置は、各要求システムで設定された要求値の各々に、各調停処理で共通して用いられる優先順位を付与するID付与部9300を備える。
(もっと読む)
車両の制御装置
【課題】ギヤ段の切り換え指示がなされて切り換え予定のギヤ段を成立させるためのワンウェイクラッチが係合するとき、トルクダウン処理を実行できずに上記係合に伴うショックを抑制できなくなることを回避できるようにする。
【解決手段】変速処理におけるトルクダウン処理の実行条件として、タービン回転速度がワンウェイクラッチの係合に繋がる同期回転速度に到達すると予測されるという条件の他、ギヤ段の切り換え指示があってからマスク時間が経過しているという条件も加えられ、上記各実行条件のうちのいずれかが不成立であればトルクダウン処理の実行が禁止される。そして、上記マスク時間に関しては、ギヤ段の切り換え指示がなされてから現在のギヤ段を成立させるべく摩擦係合されている摩擦係合要素を解放するまでに必要な時間、言い換えれば同摩擦係合要素に作用する油圧を上記解放を実現可能な値まで低下させるために必要な時間に設定される。
(もっと読む)
制御システムおよび車両
【課題】車両の円滑な減速を可能にする制御システムおよびそれを備えた車両を提供する。
【解決手段】変速制御システムは、CPU、スロットルセンサ、シフトアクチュエータおよび燃料噴射装置を備える。CPUは、スロットルセンサの検出値によりスロットルバルブの制御不良を検知した場合、自動二輪車が予め設定された負の目標加速度で走行するように燃料噴射装置を制御してエンジンの出力を調整する。また、CPUは、自動二輪車の速度低下に従って変速機が段階的にシフトダウンされるようにシフトアクチュエータを制御する。
(もっと読む)
変速制御システムおよび車両
【課題】変速ショックを十分に抑制することができる変速制御システムおよびそれを備えた車両を提供する。
【解決手段】変速制御システムは、ECU、スロットルアクチュエータ、クラッチアクチュエータおよびシフトアクチュエータを備える。スロットルアクチュエータはECUの制御によりスロットル開度を調整し、クラッチアクチュエータはECUの制御によりクラッチの状態を調整し、シフトアクチュエータはECUの制御により変速機のギアポジションを変更する。変速機がシフトダウンされる場合には、エンジンの回転速度が上昇するようにスロットル開度が第1の値に調整されるとともにクラッチが切断される。そして、クラッチが切断された状態で変速機のギアポジションが1段下げられる。その後、スロットル開度が第2の値まで減少され、クラッチの接続動作が開始される。第2の値は最小値よりも大きい値に設定される。
(もっと読む)
車両の走行制御装置
【課題】後続車の接近中に自車両の目標車速が変更されたときの加減速度を適正に制御することにより乗員の安全性向上を図る。
【解決手段】本発明の車両の走行制御装置は、自車両の走行速度をあらかじめ設定された目標車速に一致させる自動速度制御を行う自動速度制御手段2と、上記目標車速を一定速度刻みで増大または減少させる目標車速変更指示手段(23)と、自車両の後方を走行する後続車を検知する後続車検知手段(11)とを備える。上記自動速度制御手段2は、上記目標車速変更指示手段(23)により目標車速が変更されたときに、上記後続車検知手段(11)からの入力情報に基づき後続車が自車両に対し接近していることが確認されると、上記目標車速の変更に応じて自車両を加速または減速させる際の目標加減速度を、後続車が接近中でないときに設定される通常の目標加減速度βとは異なる値(α,γ)に変更する。
(もっと読む)
車両用駆動装置の制御装置
【課題】駆動力源であるエンジン及び電動機と変速部とを備えた車両用駆動装置の制御装置において、駆動力源の切替え時のショック発生を抑制するとともに、駆動力源の切替え時におけるトルク応答性の向上を図る。
【解決手段】アクセル踏み込み等の要求駆動トルクの増加により駆動力源の切替えが、例えば電動機によるモータ走行中からエンジン始動である場合、切替え時にアウトプットトルクが直ぐに立ち上がるようにエンジン始動を優先して実行する。また、車速増加によりモータ走行中からエンジン始動を行う場合、変速部の変速比変更を優先して実行し、例えばエンジン走行に対応した変速比(小さい変速比)に変更した後に、エンジンを始動することにより、エンジン始動時のショック発生を抑制する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】車両用動力伝達装置において、変速ショックを低減できる制御装置を提供する。
【解決手段】係合圧制御手段78は、第2電動機M2の作動が電動機電力収支Wmに対する制約によって制限されるとの判定を電力収支制約判定手段72が肯定した場合には、そうでない場合と比較して、自動変速部20の変速中における係合側係合圧を高くする。従って、自動変速部20の変速中における上記係合側係合圧が適切に調整されることにより、自動変速部20の変速中における自動変速部20の入力回転速度N18を適切な変化率で変化させ、変速ショックの低減を図り得る。例えば、自動変速部20のアップシフト中の係合側係合圧が高められることは、第2電動機M2の作動制限により自動変速部20の入力トルクが相対的に増加する場合に、その入力トルク増加が入力回転速度N18の変化率に与える影響を打ち消す方向に作用する。
(もっと読む)
変速機付エンジンの制御装置。
【課題】慣らし運転時のアップシフトのタイミングを的確に把握することができると共に、慣らし運転中であっても緊急時に必要な駆動力を得ることができるようにする。
【解決手段】車両の総走行距離Dに基づいて慣らし上限エンジン回転数Naを設定し(S3)、この慣らし上限エンジン回転数Naに基づいて変速段毎の慣らし上限車速Saを設定する(S4)。そして車体の加速度Gxに基づき設定時間t後の推定車速Smを算出し(S12)、推定車速Smが慣らし上限車速Saを超えている場合、予告警報フラグF1をセットする(S14)。予告警報フラグF1がセットされると、スピーカからエンジン回転数Neが許容回転をオーバーする旨の音声が出力され、運転者に注意を喚起する。運転者はスピーカからの音声を認識することで、アクセルペダルの踏込みを緩める等してアップシフトさせる。
(もっと読む)
ハイブリッド車両
【課題】電気モータのロータが入力軸に係合する変速機構において、当該入力軸に対応するクラッチを係合状態にしたまま、変速段を切替える動作を行うことが可能なハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、第2変速機構40において現在、係合状態にある変速段である現変速段から、第2変速機構40において新たに係合状態にする変速段である新変速段に切替える場合、機関出力軸8から第2入力軸28に伝達されたトルクを打ち消すよう、電気モータ50により当該トルクとは逆向きのトルクを第2入力軸28に作用させて、第2変速機構40において現変速段を解放状態にする解放動作を行わせ、その後、第2入力軸28の回転速度が、車速と新変速段に基づいて設定された目標回転速度となるよう、内燃機関5及び電気モータ50を協調して作動させて、解放状態にある新変速段を係合状態にする係合動作を行わせる。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
車両の制駆動制御装置及び自動運転制御方法
【課題】自動運転の解除時の走行状況に応じて運転者の違和感を緩和する。
【解決手段】自車両の加減速制御を行い少なくともカーブ進入前にカーブを走行可能な目標車速に制御する自動運転制御を備える。その自動運転制御が解除されても、次のカーブまで自車両の減速状態が維持しない状態と推定される場合には、減速制御を維持する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線を検出できない場合があっても、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両側方の障害物を検出すると、運転者の操舵入力に基づき所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が、上記障害物に近い側の車線区分線を基準とした判定閾値に到達若しくは当該判定閾値よりも障害物側と判定すると、側方障害物に対する支援制御の開始と判定する。但し、障害物に近い側の車線区分線を検出できない場合には、上記制御開始を判定する際に基準とする車線区分線を車線幅方向外側へ変位させる。
(もっと読む)
内燃機関のEGR装置
【課題】内燃機関のEGR装置において、EGR弁が目標開度に合わない場合であってもEGRガスを適正量供給することができる技術を提供する。
【解決手段】内燃機関の排気通路と吸気通路とを接続するEGR通路と、EGR通路で開閉するEGR弁と、EGR通路が接続されるよりも下流側の吸気通路において吸気の通路断面積を調節する調節装置と、EGR弁の開度が目標開度に合わないときであって該目標開度よりも大きい場合には、EGR弁の開度が目標開度に合っているときと比較して、調節装置よりも上流側のガスの圧力が上昇する方向へ該調節装置を作動させる制御装置と、を備える。
(もっと読む)
ハイブリッド車両
【課題】運転者の操作により変速が行われた際に、運転者が自然な変速感を体感することができるハイブリッド車両を提供すること。
【解決手段】ハイブリッド車両20は、エンジン22と、MG1と、遊星歯車機構30と、MG2と、バッテリ50と、エンジン22の運転制御、MG1およびMG2のそれぞれに対して力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行うハイブリッド制御装置(エンジンECU24、モータECU40、バッテリECU52、ハイブリッドECU70)とを備える。ハイブリッド制御装置は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、要求駆動力設定部70aにより要求駆動力Tnをトルク比tに基づいた値に変更する。
(もっと読む)
車両用走行路面検出装置
【課題】簡単な構成でかつ小さい処理負担で、自車両が走行する走行路面の勾配状態を検出できるようにする。
【解決手段】第1地点で撮像された第1画像中の走行路面に基づいて、上記第1地点から該第1地点に対して所定距離先にある第2地点まで同じ勾配が継続すると仮定して、その仮想走行路面での第2地点の走行路幅を第1走行路幅として算出し(ステップS3,S4)、第2地点の手前近傍の地点に達したときに撮像された第2画像中の走行路面に基づいて第2地点の走行路幅を第2走行路幅として算出し(ステップS8,S9)、上記第1走行路幅と上記第2走行路幅との大小関係に基づいて、第2地点での走行路面の勾配状態を判定する(ステップS10)。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
81 - 100 / 425
[ Back to top ]