
Fターム[3D043EA18]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDの動力伝達装置 (2,416) | 4WDの構成 (754) | クラッチ式4WD (500) | 多板クラッチ (288)
Fターム[3D043EA18]に分類される特許
61 - 80 / 288
作業車の前輪増速装置
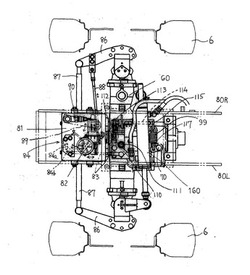
【課題】本発明では、増速機構を作動する増速切換モータに土塊や泥水等が付着し難くすることで、泥水による増速切換モータの作動不良を防ぎ、さらに、例え増速機構が泥で作動不良になっても破損しないようにすることを課題とする。
【解決手段】フロントアクスルハウジング60を左右に設ける帯鉄状の左右サイドフレーム80L,80Rで支持し、このフロントアクスルハウジング60の前側であって左右のサイドフレーム80L,80Rに挟まれた支持台81上に増速切換モータ82を配置すると共に、左右前輪6,6を増速する増速機構105を作動させる増速切換軸70と前記増速切換モータ82の出力軸を引張バネ99で連結し、クラッチ切位置に付勢保持した増速切換軸70を増速切換モータ82の駆動で引張バネ99を引いて増速切換軸70を前輪増速に切換えるようにしたことを特徴とする作業車の前輪増速装置とした。
(もっと読む)
四輪駆動車の動力伝達装置及び動力伝達方法

【課題】四輪駆動状態と二輪駆動状態との切り換え機能、及び、高速レンジと低速レンジとの切り換え機能を有する四輪駆動車に対し、構成の簡素化及び小型化を図ることができる四輪駆動車の動力伝達装置を提供する。
【解決手段】遊星歯車機構30のキャリアCAをモータジェネレータ2の出力軸26に、リングギヤRをリヤプロペラシャフト51に、サンギヤSをフロントプロペラシャフト41にそれぞれ接続する。サンギヤSを車体側に固定可能とするスリーブ機構と、フロントディファレンシャルギヤ44と右側車輪4Rとの間のトルク伝達を遮断可能とするディスコネクト機構46とを備えさせる。スリーブ機構を解放状態とし且つディスコネクト機構46を係合状態とすることで4WD−Loモードを成立させる。スリーブ機構を係合状態とし且つディスコネクト機構46を解放状態とすることで2WD−Hiモードを成立させる。
(もっと読む)
駆動力配分装置
【課題】温度センサ高温異常と温度センサ地絡異常とを正確に判定し、4WDから2WDに切り替えた際の車両走行の安定性を向上した駆動力配分装置を提供することにある。
【解決手段】温度センサ電圧値の低下する温度検出値変化率が温度センサ電圧変化率閾値より小さい場合には、温度センサ電圧高温異常と判断し、また、温度センサ電圧値の低下する温度検出値変化率が温度センサ電圧変化率閾値より大きい場合には、温度センサ電圧地絡異常と判断する。そして、温度センサ電圧高温異常と判断された場合には、駆動力配分を主駆動輪と補駆動輪とによる配分から主駆動輪のみによる配分に徐々に切り替える。
(もっと読む)
作業車両
【課題】エンジンが停止している時に四輪駆動状態から二輪駆動状態に切換え可能にして、後輪の整備時における車輪に対する負荷を無くして、整備性を向上させる作業車両を提供する。
【解決手段】前輪2を後輪3の駆動速度と略等しい速度で駆動する標準油圧クラッチSと、前輪2を後輪3の駆動速度より大なる速度で駆動する増速油圧クラッチBを設けると共に、標準油圧クラッチSに付勢部材33を設けて、エンジンが停止して油圧クラッチS,Bに圧油が供給されていない時に、当該付勢部材33によって標準油圧クラッチSを入りとして四輪駆動状態となす一方、エンジンが停止している際に、四輪駆動状態から二輪駆動状態に切換える二駆・四駆切換機構Aを設ける。
(もっと読む)
四輪駆動車駆動力配分制御装置
【課題】主駆動軸および従駆動輪に作用する軸重を考慮して、その軸重に応じた駆動力配分を行えるよう補正を行うことで、各駆動輪に適切な駆動トルクを配分できる四輪駆動車駆動力配分制御装置を提供する。
【解決手段】四輪駆動車駆動力配分制御装置において、四輪駆動車駆動力配分制御装置は、トルク対応締結力調整値と回転速度偏差対応締結力調整値との和である総締結力調整値を補正するための補正係数を決定する補正係数決定部と、車両の前後方向の傾きを検出する車両姿勢検出装置を備え、車両姿勢検出装置の検出結果に応じて補正係数を設定して総締結力調整値を補正する。
(もっと読む)
駆動力配分装置
【課題】副変速機の切換えと摩擦クラッチのクラッチ押付力とに対する応答性を改良した駆動力配分装置を提供する。
【解決手段】駆動力配分装置は、シフトカム37及び摩擦クラッチ駆動用カム60間に相対回転可能に同軸配置された回転駆動部材81と、回転駆動部材81の回転方向と直交する方向に回転可能に設けられ、シフトカムと連動する位置、及び摩擦クラッチ駆動用カム60と連動する位置に切換えられるラチェットレバー87とを備えている。シフトカム37が高速段にあって所定の位置から一方側に回転駆動したとき摩擦クラッチ41の押付力を調整し、一方側とは逆方向に回転駆動したときシフトカム37と連動してシフトカム37を低速段へと回転し、主出力軸6と副出力軸7とを直結する機構110,111を介して低速段を維持する。
(もっと読む)
駆動力配分装置
【課題】副変速機の切替えと摩擦クラッチのクラッチ押付力とに対する応答性を改良した駆動力配分装置を提供する。
【解決手段】駆動力配分装置は、アクチュエータ出力軸72に固定された回転駆動部材81がシフトカム37と板カム60との間に相対回転可能に同軸配置されている。回転駆動部材81には、ラチェットレバー87が回転駆動部材81の回転方向と直交する方向に回転可能に設けられている。回転駆動部材81は、所定の位置から一方側に回転駆動したときシフトカム37から離脱して回転するとともに、一方側とは逆方向に回転駆動したときシフトカム37と連動して回転する。
(もっと読む)
駆動力配分装置
【課題】簡単な構成で、車両走行中における副変速機の切替えを確実に阻止することを可能とした駆動力配分装置を提供する。
【解決手段】駆動力配分装置は、シフトカム37に同軸に支持され、シフトカム37のシフト位置となる2箇所に対応してシフト位置を決めるチェック機構100を備える。このチェック機構100は、シフトカム37との係合を解除する抵抗トルクと回転角とにより計算される吸収エネルギーが摩擦クラッチ41の反発力によりアクチュエータ70を逆転駆動させるときに放出するエネルギーよりも大きくなるように、抵抗トルクと回転角とを設定している。
(もっと読む)
4輪駆動車用駆動力配分装置
【課題】摩擦クラッチの作動中に発生するシフト動作を回避することを可能とした4輪駆動車用駆動力配分装置を提供する。
【解決手段】制御装置70は、位置検出器65からの信号に基づいてモータ正逆回転を制御することで、シフト操作、及び伝達トルク調整を行う。制御装置70は、モータ印加電圧がシフト方向への電圧である場合に電圧時間積分を行い、その電圧時間積分値が所定の閾値を超えた場合にモータ61に摩擦クラッチ駆動方向の電流を流すことで、モータ回転方向を反転させるとともに、位置検出器65からの信号に所定の閾値を超える変化があった場合には電圧時間積分値をゼロリセットする。
(もっと読む)
四輪駆動車
【課題】車両の旋回時における駆動力伝達系の衝撃を低減することが可能な四輪駆動車を提供する。
【解決手段】四輪駆動車101は、トルクを発生するエンジン102と、エンジン102のトルクを第1及び第2のギヤ機構41,42を介して前輪104L,104R及び後輪105L,105Rに伝達する駆動力伝達系106と、駆動力伝達系106に設けられ、後輪105L,105Rへのトルク伝達量を制御可能な多板クラッチ7と、後輪105L側へ伝達されるトルクの一部を軸方向の推力に変換して多板クラッチ7を押圧する押圧機構8とを備え、前輪104L,104Rの舵角が最大値まで変化した場合でも、多板クラッチ7の入力側に連結された中間シャフト54と出力側に連結されたドライブシャフト115Lとの差動回転方向が反転しないように第1及び第2のギヤ機構41,42のギヤ比を設定する。
(もっと読む)
四輪駆動車及びその制御装置
【課題】2輪駆動状態での車両の発進時にスリップが発生した場合でも、噛み合いクラッチを介してトルクが伝達される補助駆動輪に速やかにトルクを伝達することが可能な四輪駆動車及びその制御装置を提供する。
【解決手段】四輪駆動車101は、駆動源であるエンジン102と、エンジン102のトルクを前輪104L,104R及び後輪105L,105Rに伝達する駆動力伝達系106と、駆動力伝達系106に設けられ、凹部と凸部との係合により後輪105L,105R側にトルクを伝達することが可能な噛み合いクラッチ130と、路面の摩擦係数に関連する指標値に基づいて、路面の摩擦係数が所定値よりも低いか否かを判定する判定手段9b1と、判定手段9b1により路面の摩擦係数が所定値よりも低いと判定されたとき、発進前に噛み合いクラッチ130の係合を行わせる制御信号を発生する制御手段9b2とを有する。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
駆動力配分装置
【課題】 四輪駆動車両において、駆動力配分装置から発生するギア音が聞こえ得る状態で、ギア音を低減する。
【解決手段】 駆動輪WFR、WFL及び従駆動輪WRR、WRLを備えた四輪駆動車両1において、制御手段8a2は、変速段検出手段8a3によって検出された四輪駆動車両1の変速機TMの現在の変速段が所定の変速段以上で、直進状態判定手段8a1が直進状態と判定した場合、四輪駆動車両1のアクセルペダルの操作量が所定の操作量以上であるとき、従駆動輪WRR、WRLに配分する駆動力を減少する。
(もっと読む)
四輪駆動車両の駆動力配分制御装置
【課題】車両挙動を不安定にしたり、カント路面を駆け上がるモーメントを発生させることのない、オーバーステアおよびアンダーステア緩和用左右駆動力差制御を提供する。
【解決手段】S14でオーバーステアと判定する場合、S17で後輪合計駆動力用のフィードバック制御係数K1を0とし、後輪駆動力差用のフィードバック制御係数K2も0とすることで、二輪駆動走行状態にする。よって当該オーバーステア状態で、四輪駆動走行されることによる旋回走行不安定を回避することができる。S15でアンダーステアと判定する場合、S18でK1=1とし、K2=0とすることにより、四輪駆動走行させるも左右後輪間に駆動力差を設定しない。これにより、当該アンダーステア状態で四輪駆動走行による優れた走破性を享受しつつ、左右後輪間に駆動力差が設定されることによる、カント路面駆け上がり現象を回避することができる。
(もっと読む)
四輪駆動車の駆動システム及び四輪駆動車の駆動システムの制御方法
【課題】四輪駆動車の2輪駆動状態から4輪駆動状態への切り換えに要する時間を短縮しながら、4輪駆動状態への切り換え時における衝撃や振動を抑制することが可能な四輪駆動車の駆動システム及び四輪駆動車の駆動システムの制御方法を提供する。
【解決手段】四輪駆動車101の駆動システム1は、エンジン102の駆動力を後輪105a,105bに伝達するプロペラシャフト2と、エンジン102とプロペラシャフト2との間の連結を遮断可能な噛み合いクラッチ3と、プロペラシャフト2と後輪105a,105bとの間の伝達トルクを調整可能なトルクカップリング4と、トルクカップリング4による伝達トルクを高めてプロペラシャフト2の回転速度を上昇させた後にトルクカップリング4による伝達トルクを低減し、伝達トルクを低減した状態で噛み合いクラッチ3を連結状態とするECU5とを備える。
(もっと読む)
車両の制御装置
【課題】新たなアクチュエータを必要とすることなく車両の走行特性を制御する。
【解決手段】車両1は、エンジン10からのトルクが直接伝達される前輪14,14と、エンジン10からのトルクがカップリング装置30を介して伝達される後輪18,18とを備え、アクチュエータ31によりカップリング装置30の状態を変化させることによって、前後輪のトルク配分を変更するように構成されている。そして、車両1では、カップリング装置30のアクチュエータ31へ出力されるPWM制御出力の周波数を、カップリング装置30によるトルク配分の変更制御を行う場合のPWM制御出力の周波数よりも低周波側へ変更することによって、後輪18,18に対し、その回転方向に沿う振動を与える。
(もっと読む)
車両の駆動状態制御装置
【課題】オンデマンド式装置において、4輪駆動状態から2輪駆動状態への切り換えの際、クラッチ駆動電流が無駄に消費されること、並びに、車輪に大きなスリップが発生することを抑制すること。
【解決手段】2輪駆動状態において駆動輪(後輪)に加速スリップが発生したとき、駆動システムが2輪駆動状態から4輪駆動状態へと切り換えられる。即ち、多板クラッチ機構の伝達可能最大トルクTが「0」から所定値T1に増加する。4輪駆動状態では、車輪の何れにも加速スリップが発生しない状態で車両が所定距離Daだけ走行する毎に、伝達可能最大トルクTが現在値から所定値Aだけステップ的に減少していく。即ち、多板クラッチ機構C/Tに供給されるクラッチ駆動電流Iが徐々に(ステップ的に複数回)減少していくとともに、前輪(後輪)への駆動トルク配分が徐々に減少(増加)していく。
(もっと読む)
四輪駆動車の前後駆動力配分比制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる四輪駆動車の前後駆動力配分比制御装置を提供することを目的とする。
【解決手段】四輪駆動車における前後駆動力配分比を、その四輪駆動車のスタビリティファクタが目標値に追従して変化するように制御する四輪駆動車の前後駆動力配分比制御装置において、前後加速度に基づいて前記スタビリティファクタの目標値を求める目標値設定手段(ブロックB1〜B4)と、その目標値設定手段で求められた前記目標値とスタビリティファクタの実際値とに基づいてスタビリティファクタの補正量を求める補正量算出手段(ブロックB5〜B6)と、その補正量算出手段で求められた前記差が小さくなるように前記前後駆動力配分比を設定する前後駆動力配分比設定手段(ブロックB9〜B11)とを備えている。
(もっと読む)
車両の制御装置
【課題】ドライバの意図した車両旋回走行が為されるようにタックインを抑制する為の駆動力を適切に制御する。
【解決手段】操舵角θSWに基づいて算出される目標ヨーレイトRYtと、ヨーレイトセンサ68により検出された実ヨーレイトRYaとのヨーレイト偏差ΔRYに基づいて推定したドライバのタックインさせる意図が大きい程、そのタックインが発生し易いようにタックイン抑制制御におけるタックイン抑制トルクTYoffが抑制されるので、例えば車両旋回中におけるタックインの発生に際してドライバのタックインさせる意図をも考慮した形でタックインを抑制する為のタックイン抑制トルクTYoffを適切に制御することができる。つまり、ドライバの意図した車両旋回走行が為されるようにタックイン抑制トルクTYoffを適切に制御することができる。
(もっと読む)
前後輪駆動車両の制御装置
【課題】エンジンの自動始動時に好適なトルク伝達状態を実現する前後輪駆動車両の制御装置を提供する。
【解決手段】予め定められた第1の条件が成立した場合にエンジン12を自動停止すると共に、予め定められた第2の条件が成立した場合にバッテリ38の電力を用いてエンジン12を自動始動するエンジン制御手段80と、そのエンジン制御手段80によりエンジン12が自動始動させられる前にバッテリ38の電力を用いて電磁クラッチ26に所定の予備トルクTecmを付与するプレトルク制御を行う伝達トルク制御手段84とを、備えたものであることから、エンジン12の自動始動と同時に電磁クラッチ26の伝達トルク増加制御が行われる場合であっても、バッテリ電圧の低下を抑制して速やかに所望の伝達トルクを実現することができる。
(もっと読む)
61 - 80 / 288
[ Back to top ]