
Fターム[3D046HH08]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 操舵状態 (651)
Fターム[3D046HH08]に分類される特許
1 - 20 / 651
車両のヨーモーメント制御装置
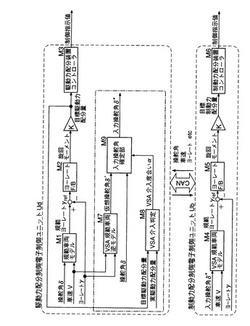
【課題】 制動力配分制御電子制御ユニットに大幅な改修を施すことなく、駆動力配分制御電子制御ユニットとの協調制御を可能にして車両のヨーモーメント制御装置のコストダウンを図る。
【解決手段】 駆動力配分制御電子制御ユニットUdのVSA規範車両逆モデルM7が車速Vおよびヨーレートγから仮想操舵角δ′を算出し、目標駆動力配分量に対する実駆動力配分量の偏差が小さくて制動力配分装置を作動させる必要がないときには、入力操舵角確定部M9が制動力配分制御電子制御ユニットUbへの入力操舵角δ* として前記仮想操舵角δ′を出力する。これにより、駆動力配分装置を優先的に作動させて制動力配分装置の作動量を最小限に抑え、制動力配分装置の作動に伴う車両の減速を防止しながら、既存の制動力配分制御電子制御ユニットUbを設計変更することなくそのまま使用してコストダウンに寄与することができる。
(もっと読む)
牽引車両及び被牽引車両

【課題】旋回しながらの後退時における被牽引車両の旋回の曲率半径を減少できると共に、被牽引車両の幅寄せや車庫入時の切返し回数及び走行距離を低減できる被牽引車両を提供する。
【解決手段】被牽引車両40には、一対の車輪42a,42bそれぞれを互いに独立して制動する制動ユニット70が組み込まれている。この制動ユニット70は、一対の車輪42a,42bそれぞれを制動する一対の制動機(ブレーキ)72a,72bを備えている。制動機72aだけを作動させて車輪42aだけを制動させて回転できないようにする一方、制動機72bを作動させずに車輪42bは自由に回転できるようにしておくことができる。この逆もできる。勿論、2つの制動機72a,72bを共に作動させないようにすることもできる。
(もっと読む)
車両の制御装置及び制御方法
【課題】
対地速度センサが異常と判定された場合に、車両挙動が不安定になることを抑制する。
【解決手段】
車輪速センサの出力信号から求めた車輪速に基づいて第1推定車体速を求める第1車体速推定部3と、対地速度センサの異常状態を検出する対地速度センサ異常検出部6と、対地速度センサの出力信号から求めた車体速、第1推定車体速、及び対地速度センサの異常状態に基づいて第2推定車体速を求める第2車体速推定部5と、車両制御において使用する推定車体速を選択する推定車体速選択部7と、対地速度センサの異常状態に基づいて、車体速と車輪速に基づいて車両を制御する第1の車両制御部8と、推定車体速選択部7により選択された推定車体速に基づいて車両を制御する第2の車両制御部9のいずれかを選択する車両制御選択部10とを有する車両の制御装置。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】車両の運動制御装置において、電動モータの回転数を低下させてもホイールシリンダに対する増圧応答性を適切に得る。
【解決手段】車両の運動制御装置は、モータ制御手段(306,314)が電動モータ33の回転数を低下させる場合、弁制御手段(ステップ312,314)が、マスタシリンダとホイールシリンダとの間に介在する液圧制御対象の増圧弁を駆動してホイールシリンダ側に流出される単位時間あたりのブレーキ液の流量を増大させる。
(もっと読む)
車両用運転支援装置
【課題】操作ミスを犯した場合にも、衝突をより確実に回避し得る車両用運転支援装置を提供する。
【解決手段】車両用運転支援装置において、障害物を検出する障害物検出手段と、上記障害物検出手段による障害物の検出結果に基づき、自車両と障害物との衝突可能性を判定する衝突可能性判定手段と、上記衝突可能性判定手段により衝突可能性があると判定された場合に、衝突を回避するよう車両制御する衝突回避手段と、上記衝突回避手段による車両制御に関連したドライバの操作状態を検出するドライバ操作状態検出手段と、ドライバの運転姿勢を検出する運転姿勢検出手段と、上記ドライバの運転姿勢に応じて、上記自動衝突回避手段による車両制御及びドライバ操作状態検出手段により検出されたドライバによる操作制御のいずれかから優先する制御を判定する優先制御判定手段と、を設ける。
(もっと読む)
駆動力配分制御装置
【課題】安全に小回り制御を実行することができる駆動力配分制御装置を提供する。
【解決手段】車両1の各輪21〜24の空気圧に関する情報を取得する空気圧情報取得手段41〜44を備え、車両1の旋回時に内輪の駆動力を小さくし、車両1の機械的特性で決まる最小回転半径よりもさらに回転半径を小さくする小回り制御を行う際、旋回内輪の空気圧情報に基づいて、駆動力変更手段55により車両1前後の内輪に対する駆動力の配分を変更することで、空気圧が低下している内輪が小さい駆動力で旋回することを回避し、これによって、リム外れを回避する。
(もっと読む)
車両の運動制御装置
【課題】モータの負荷を考慮してポンプの作動音を低減すると共に、W/C圧を目標W/C圧にすることが円滑に行えるようにする。
【解決手段】横滑り防止制御の制御対象輪が含まれる制御系統が1つのみであるか2つであるかによりモータ60に掛かる負荷を判定する。そして、制御系統が1つのみの場合にはモータ60に掛かる負荷があまり大きくないと判定して、目標W/C圧の大小に関わらず第1、第2差圧制御弁16、36のうち制御対象輪の配管系統に含まれる側の差圧制御弁で発生させる差圧を一定値に設定する。また、制御系統が2つのみの場合にはモータ60に掛かる負荷が大きいと判定して、目標W/C圧の大きさに応じて第1および第2差圧制御弁16、36で発生させる差圧を設定する。これにより、ポンプ19、39の吐出口側のブレーキ液圧が比較的高くならないようにされ、ポンプ駆動が抑制されないようにできる。
(もっと読む)
駆動トルク伝達システム
【課題】デファレンシャル装置において、アクチュエータの電気的な作動制御に対応する機械的な進展を図ることを可能とする。
【解決手段】エンジン11からの駆動トルクを前輪17,19に分配して伝達可能なフロント・デファレンシャル装置3と、分配アクチュエータにより動作して分配を調整するトルク配分調整機構5と、分配アクチュエータの作動を制御するコントローラ7とを備えた駆動トルク伝達システム1であって、差動歯車機構9は、駆動トルクの入力を受けるデフ・ケース21と、デフ・ケース21と共に公転可能に支持され且つ自転可能な円筒状のピニオン・ギヤ23と、ピニオン・ギヤ23にそれぞれ噛み合い配置され相対回転可能な一対のフェース・ギヤ25,27とからなることを特徴とする。
(もっと読む)
車両用乗員保護装置
【課題】車両の衝突回避操作に際し、シートベルト未装着の乗員を確実に保護する車両用乗員保護装置を提供する。
【解決手段】乗員保護装置において、障害物との衝突可能性を予測する衝突発生予測手段と、上記衝突発生予測手段による衝突発生予測に応じて、衝突を回避するよう車両制御する衝突回避手段と、シートベルトを装着していない乗員を検知するベルト未装着乗員検知手段と、上記ベルト未装着乗員検知手段により検知されたベルト未装着の乗員に対し、該乗員に安全姿勢をとらせるよう誘発する安全姿勢誘発手段と、を設ける。上記ベルト未装着の乗員を検出したとき、上記安全姿勢誘発手段を作動させた後、所定条件の成立時に上記衝突回避手段を作動させる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 3軸以上の多数の車軸を備えた車両をヨーモーメント制御するにあたり、車
両走行時の挙動修正を的確に行い、車両走行時の安定性を高める。
【解決手段】 3軸以上の車軸が設けられた車両100の最も前の車軸と最も後ろの車軸
を除いた中間軸のタイヤに加えるブレーキ力を調整することにより、車両100のヨーモ
ーメントを制御する。
(もっと読む)
制動制御装置
【課題】前輪と後輪が回生について非対称である車両について、要求総制動力に対する制御精度が高くて滑らかな制動を可能とし、しかも走行安定性を確保しつつ回生量を増加させることができるようにする。
【解決手段】制動制御装置は、要求総制動力の配分を制御する制動力配分手段を備えており、制動力配分手段は、回生配分で要求総制動力の配分を行う。そしてその回生配分は、前輪と後輪が同時にロックする配分を与える理想配分線ILよりも後輪に配分率が偏る後輪優位の範囲であり、かつ制動時の路面摩擦係数との関係で後輪がロックする後輪ロック限界線μ2L以下の範囲であることを条件とし、さらに要求総制動力の変化に伴う前輪制動力の変化に対する後輪制動力の変化の比率である後輪制動力変化率が常に正となることを条件とするようにされている。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
ブレーキ装置
【課題】液圧式ブレーキがフェードした場合であっても適切な制動力を得ることができ、乗用車等の小型車にも適用が容易なブレーキ装置を提供する。
【解決手段】ブレーキ装置を、ブレーキフルードの圧力に応じた制動力を発生する液圧式ブレーキ80と、電動アクチュエータ20によって駆動される電動式ブレーキ10と、液圧式ブレーキ80のフェード状態を検出するフェード状態検出手段40と、液圧式ブレーキ80のフェード状態が生じた場合に、フェード状態による液圧式ブレーキ80の制動力低下量に応じた制動力で電動式ブレーキを制動させる電動式ブレーキ制御手段40とを備える構成とする。
(もっと読む)
自動車およびその制御方法
【課題】トラクション制御や姿勢保持制御の実行の有無に応じたストール発進を行なう。
【解決手段】ストール発進時にトラクションコントロールか姿勢保持制御のいずれかがオンの状態のときには回転数が低く調整された通常時の目標回転数設定用マップを用いてエンジン目標回転数Ne*を設定し(S130)、トラクションコントロールも姿勢保持制御もオフの状態のときにはより大きな回転数が目標回転数Ne*に設定されるオフ時の目標回転数設定用マップを用いてエンジンの目標回転数Ne*を設定し(S140)、設定した目標回転数Ne*によりエンジンが回転すると共にアクセル開度Accに応じた要求トルクTr*が駆動軸に出力されるようエンジンとモータMG1,MG2を制御する(S150〜S210)。これにより、トラクションコントロール(TRC)や姿勢保持制御(VSC)の実行の有無に応じたストール発進を行なうことができる。
(もっと読む)
車両の制動制御装置
【課題】センターデファレンシャルを搭載している車両を含めた直結4輪駆動状態となる駆動状態モードを有する車両について、車両が直結4輪駆動状態となったときでも、車両の挙動を安定させる制動制御を行うことができる制動制御装置を提供することを目的とする。
【解決手段】本発明は、車両の挙動を安定させる制動制御を行う制動制御装置80であって、
前記車両の駆動状態を切り替える駆動状態切替手段60と、
前記車両のスリップ状態を検出するスリップ状態検出手段10と、
前記制動制御の作動許可を判定する制動制御許可判定手段30とを備え、
前記制動制御許可判定手段は、前記駆動状態切替手段により前記車両が直結4輪駆動状態とされたときには、前記スリップ状態検出手段により検出されたスリップ状態が所定のスリップ状態を越えたときに、前記制動制御の作動許可を行うことを特徴とする。
(もっと読む)
自動制動装置
【課題】運転者が操作入力を怠った場合でも自車両と障害物との衝突を回避する可能性を高めることのできる自動制動装置を低コストで実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突の可能性を判断する衝突可能性判断手段と、運転者の操作入力を検出する操作入力検出手段4と、障害物と自車両の左右方向の位置関係を検出する位置関係検出手段2と、位置関係検出手段2の検出結果に基づいて自車両の回避可能方向を判断する回避可能方向判断手段と、衝突可能性判断手段により障害物に衝突する可能性があると判断され、かつ操作入力検出手段4により運転者の操作入力が検出されていない場合に、回避可能方向への自車両の回頭性が高まるように、各車輪のブレーキ力に差を生じさせてブレーキ20を自動作動させるブレーキ力制御手段と、を備える。
(もっと読む)
自動制動装置
【課題】車両の走行状態や運転者の操舵入力又は制動入力に対する車両の走行状態の応答特性に合わせてタイミングよくブレーキを自動作動させることのできる自動制動装置を実現する。
【解決手段】自動制動装置に、自車両の障害物への衝突を操舵により回避可能な障害物までの操舵回避距離を算出する操舵回避距離算出手段と、自車両と障害物との実距離Lが前記操舵回避距離より短くなるとブレーキ15を自動作動させる自動ブレーキ作動手段と、自車両の走行状態を検出する走行状態検出手段5と、を備え、走行状態検出手段5の検出結果に基づいて、操舵により障害物への衝突を回避すると自車両が不安定になると判断される場合には、自動ブレーキ作動手段によるブレーキ15の自動作動開始時期を早めるように、前記自動ブレーキ作動手段を構成する。
(もっと読む)
車両状態判定装置
【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
車両のブレーキ制御方法およびブレーキ装置
【課題】直進時だけでなく、旋回時でもアンチロック制御に入るタイミングの判断を正確にできる電動式パーキングブレーキによるブレーキ制御方法およびブレーキ装置を提供する。
【解決手段】車両11の走行中に、モータ駆動のパーキングブレーキ装置16でブレーキを掛けるブレーキ制御方法であって、ブレーキを掛ける方向にモータを回転させると共に、左側の前後の車輪速(FL、RL)の差(ΔL)と右側の前後の車輪速(FR、RR)の差(ΔR)の和(ΔL+ΔR)を求め、この値がしきい値より大であるときにブレーキを解除する方向にモータを回転させ、しきい値と同一か小であるときにブレーキを掛ける方向にモータを回転させる。
(もっと読む)
1 - 20 / 651
[ Back to top ]