
Fターム[3D046JJ00]の内容
ブレーキシステム(制動力調整) (22,399) | 制御方法 (1,512)
Fターム[3D046JJ00]の下位に属するFターム
基準値設定 (589)
車体加減速度と基準値との比較 (128)
車体速度と基準値との比較 (139)
車輪速度と基準値との比較 (138)
車輪加減速度と基準値との比較 (13)
複数輪の共通制御 (4)
減圧制御 (90)
加圧制御 (142)
圧力保持制御 (39)
テーブル値制御 (157)
学習制御 (41)
ファジイ制御 (3)
Fターム[3D046JJ00]に分類される特許
1 - 20 / 29
ばね下制振装置
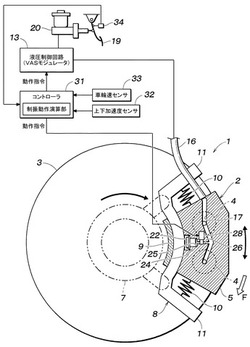
【課題】車輪を制動するディスクブレーキ装置を構成するブレーキキャリパを動吸振器の質量体として用いてばね下の制振を行う場合に、広範な周波数域のばね下振動を低減することができるようにする。
【解決手段】ブレーキキャリパ2に設けられた摩擦パッド4をブレーキロータ3に対して圧接動作させる液圧を発生する液圧制御回路13を制御するコントローラ31を備え、このコントローラが、車輪の制動を要しない通常走行時に、摩擦パッドをブレーキロータに圧接させるように液圧制御回路を制御して、動吸振器の質量体としてのブレーキキャリパに、ブレーキロータと摩擦パッドとの間の摩擦力を作用させるようにする。
(もっと読む)
車両用走行支援装置及び車両用走行支援方法

【課題】本発明は、自車両の周辺車両に応じた適切な走行支援を行うことができる、車両用走行支援装置及び車両用走行支援方法の提供を目的とする。
【解決手段】自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されるときには、後続車両を減速させるため、自車両を制動制御する。自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されないときには、前方の障害物や対向車を回避する経路があって、側方又は後方の周辺車両に衝突するおそれがない場合には、自車両を操舵制御し、回避経路がなく又は周辺車両に衝突するおそれがある場合には、自車両を制動制御する。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】パーキングロック機構を備えた車両において、車両の停止状態を維持しつつパーキングロック機構によるパーキングロック頻度を向上させる。
【解決手段】ECUは、シフトポジションがPポジションに操作され(S102にてYES)、パーキングロック条件が成立すると(S104にてYES)、パーキングロック制御を実行するステップ(S106)と、パーキングロック制御前にファイナルギヤ機構が前進方向に回転していたか否かを判断するステップ(S108)と、前進方向に回転していたと判断されると(S108にてYES)、モータジェネレータを後進方向に回転させるステップ(S110)と、後進方向に回転していたと判断されると(S108にてNO)、モータジェネレータを前進方向に回転させるステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
車両およびその制御方法
【課題】運転者が車両の起動中にシフト操作を行った場合であっても、車両の起動後に再度のシフト操作をすることなく違和感なく発進できるようにすること。
【解決手段】ハイブリッド自動車20の起動中に運転者によりシフト操作が行われたときは、そのシフトポジションSPをCPU72に記憶する。そして、起動が完了したときに、走行するシフトポジションSPがRAM76に記憶されており、ブレーキポジションBPが0%でなく且つアクセル開度Accが0%であるとはいえないとき、RAM76に記憶されたシフトポジションSPとアクセル開度Accと車速Vとに基づいて設定された要求トルクTr*が出力されるようエンジンECU24やモータECU40に指令を出力すると共に、所定の初期値から時間と共に徐々に小さな値に設定される制動トルクが作用するようにブレーキ96a〜96dを制御するようブレーキECU94に指令を出力する。
(もっと読む)
車両状態判定装置
【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
摩擦状態推定装置、自動車および摩擦状態推定方法
【課題】車輪と路面との間における摩擦状態をより正確に推定すること。
【解決手段】摩擦状態推定手段が、ブレーキパッドに印加される圧力と車輪の回転状態との関係、あるいは、ナックルとブレーキキャリパとの締結部に生じる歪みの少なくとも何れかを示す物理量に基づいて、車輪の摩擦状態(安定/不安定)を判定する。したがって、車輪と路面との間における摩擦状態をより正確に推定することができる。
(もっと読む)
車輪情報取得装置および車両制御装置
【課題】車輪に作用する加速度情報から得られる情報を精度よく取得可能とする。
【解決手段】車輪側装置は、車輪14の加速度を検出する加速度センサ68と、その加速度センサ68による検出情報を含む車輪情報を送信可能なTPMS送信機とを収容したケース62を有し、そのケース62が車輪14を構成するタイヤ30とホイール50との間に形成された内部空間Sに配置される。車体側装置は、TPMS送信機から送信された車輪情報を受信する受信部と、車輪14の回転に伴う遠心力によるケース62の変位量を推定する変位量推定部と、受信された車輪情報に含まれる加速度情報から得られる横力をケース62の変位量に基づいて補正する補正部とを有する。
(もっと読む)
ブレーキ制御システム
【課題】鉄道車両用のブレーキシステムで、各車輪の滑走に対してブレーキ力をきめ細かく制御できるようにする。
【解決手段】車軸単位にブレーキ制御器2a〜2dを配置する。ブレーキ制御器2a〜2dは、各車軸単位に、応荷重信号、ブレーキ指令、電気ブレーキ信号を基に演算された必要空気ブレーキ力で、各車軸の空気ブレーキの制御を行う。各ブレーキ制御器2a〜2dの間で各車軸の軸速度を送受信し、各ブレーキ制御器2a〜2dに対応する車軸の軸速度と、各車軸の軸速度で送受信した他の車軸の軸速度とを用いて、対応する車軸の滑走を検知し、対応する車軸の滑走、再粘着の制御を行う。車軸単位にブレーキ制御器が配置されているので、各車輪に滑走が発生した場合、ブレーキ力をきめ細かく制御できる。また、台車単位の応荷重により、各々独立して空気ブレーキ力を作用できる。
(もっと読む)
車体速度推定装置及び車体速度推定方法及び制駆動力制御装置
【課題】制動力発生装置に経年変化や異常の生じた車輪が混在していても精度良く車輪速度を推定させること。
【解決手段】少なくとも1つのモータ31FL,31FR,31RL,31RRのモータトルクを少なくとも複数の車輪10FL,10FR,10RL,10RRに対して個別に付与することの可能な車輌の車体速度を車輪の情報を用いて推定させる車体速度推定手段41dが具備された車体速度推定装置において、モータ回生トルクが働いている車輪の情報のみを利用してABS制御時の車体速度の推定を行うよう車体速度推定手段41dを構成すること。
(もっと読む)
ディスクブレーキ装置
【課題】車両の前進制動時は勿論のこと、後退制動時にもクロンク打音を確実に抑制することができるディスクブレーキ装置を提供する。
【解決手段】車両の前進制動の操作に伴いブレーキパッド6の裏金6Aがトルクメンバ3の第1トルク受部3C側に移動すると、ばね片9Aの先端部が係合突部6Eの一方の斜面に係合して裏金6Aを第1トルク受部3C側に弾性的に押圧するため、ディスクブレーキ装置は第1当接状態に保持される。また、車両の後退制動の操作に伴い裏金6Aがトルクメンバ3の第2トルク受部3D側に移動すると、ばね片9Aの先端部が係合突部6Eの他方の斜面に係合して裏金6Aを第2トルク受部3D側に弾性的に押圧するため、ディスクブレーキ装置は第2当接状態に切り換えて保持される。その結果、車両の前進制動時は勿論のこと、車両の後退制動時にもクロンク打音が確実に抑制される。
(もっと読む)
車両の運動制御装置
【課題】左右転舵時の走行性の走行感度向上と安定性向上御を両立させる車両の運動制御装置を提供する。
【解決手段】車体スリップ角算出部35で車体スリップ角βを、規範スリップ角算出部36aで規範スリップ角βmを算出する。車体スリップ角に対して規範スリップ角βmにもとづいてフィードフォワード制御が行なわれ、規範スリップ角βmと車体スリップ角βとの偏差にもとづいて、フィードバック制御が行なわれ、転舵角補正量δcとして加算部40bに入力され、目標転舵角δtが補正される。規範ヨーレート算出部37aで規範ヨーレートγmが算出される。また、ヨーレートに対して、規範ヨーレートγmにもとづいてフィードフォワード制御が行なわれ、規範ヨーレートγmとヨーレートγとの偏差にもとづいて、ヨフィードバック制御が行なわれ、ヨーモーメントMZとしてDYC制御部37kに入力される。DYC制御部37kは、駆動力配分量を決定する。
(もっと読む)
ディスクブレーキ装置
【課題】後進走行制動時の異音発生を抑制するディスクブレーキ装置を提供する。
【解決手段】ディスクブレーキ装置は、一対のブレーキパッド16と、ブレーキパッド16の前進側接触部または後進側接触部と接触して制動力を受け止めるマウンティング12と、ブレーキパッド16を駆動するブレーキアクチュエータ68と、車両の後進走行モードへの移行を検出するモード検出部46と、後進走行モードの移行を検出した場合、後進走行実行に先立ち、ブレーキパッド16で挟持されたディスクロータ14を後進回転させて、後進側接触部を受止壁部に強制接触させるパッド移動制御部44を含む。パッド移動制御部44は、後進走行モードへ移行を検出した場合、後進走行を実行する前に、後進側接触部を受止壁部に強制接触させることにより後進走行制動時にブレーキパッド16がマウンティング12に衝接することを防止して、後進走行制動時の異音発生を抑制する。
(もっと読む)
車両走行制御装置及び車両走行システム
【課題】周囲の車両との関係を検知して安全性を確保しつつ、車間距離を短縮して車両走行を行える車両走行制御装置及び車両走行システムを提供すること。
【解決手段】車両A2の周囲における操舵による衝突回避スペースR1があるか否かを検出し、操舵による衝突回避スペースR1が所定以上である場合に先行車両A1との車間距離D1を基準車間距離より短くなるように走行制御を行う。これにより、周囲を走行する他車両と隊列を組んで走行する際に、先行車両A2との衝突を回避しつつ、車間距離D1を短くして車両走行が行える。このため、隊列を組む車群内への他車の割り込みを抑制することができ、走行の安全性が確保できる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右輪間の駆動力配分および制動力配分を適切に使い分けて車両のヨーモーメ
ントを制御する。
【解決手段】 車両の旋回運動を規範ヨーレートに追従させるために必要なヨーモーメン
トが、先ず駆動力配分装置Mdが設定する左右の車輪の駆動力差によって生じさせられ、
その駆動力差で発生するヨーモーメントが前記必要なヨーモーメントに対して不足する場
合には、その不足分のヨーモーメントが制動力配分装置Mbが設定する左右の車輪間の制
動力差により生じるヨーモーメントで補われる。このように駆動力配分装置Mdを優先的
に作動させて制動力配分装置Mbの作動量を最小限に抑えることで、制動力配分装置Mb
の作動に伴う車両の減速を最小限に抑えて旋回性能および車両安定性能を向上させること
ができる。
(もっと読む)
車両の直進制動時の運転制御装置及び運転制御方法
【課題】車両の構造に内在する左右の非対称性に起因して車両の制動時に生ずる車両の偏向を是正する新規な車両の運動制御装置及び運動制御方法を提供すること。
【解決手段】本発明の車両の運動制御装置は、車体の減速度を取得する手段と、減速度に基づいて、制動装置、前後輪の操舵装置等の車体偏向手段の作動を制御して、車両の構造に於ける左右の非対称性に起因して車両の直進制動時に車体に発生する横力又はヨーモーメントを低減する横力又はヨーモーメントを発生させる偏向制御手段とを含む。
(もっと読む)
車両の制動制御装置
【課題】各車輪の制動力を検出する制動力検出手段と、少なくとも前記制動力検出手段の検出値に基づいて、モータ22を動力とするギアポンプなどの液圧供給源より供給される液圧によって各車輪の制動力を制御する制動力制御手段とを備えた車両の制動制御装置において、高負荷運転要求時の消費電流を抑制する。
【解決手段】前記モータ22に電源を供給するバッテリ24と、バッテリ24からの電圧を昇圧してモータ22に電圧を供給する昇電圧回路26とを備え、電子コントローラ27内に、モータ22の高負荷運転要求時に、昇電圧回路26の昇電圧量又は前記モータ22のデューティ比の少なくともいずれか一方が、前記高負荷運転要求時刻から所定時間後に100%となるように制御する遅延部270を設ける。
(もっと読む)
ブレーキ制御装置
【課題】変速時にも良好なブレーキフィーリングを実現する。
【解決手段】車両の変速段の切り替えが検知されたときに、Gセンサから取得した実減速度に基づく目標減速度の補正が一時的に停止され、フィードバック項KFBとして変速前の値が用いられる。そして、その変速ショックによる減速度の影響がなくなる所定期間後に通常のフィードバック制御に復帰されるようにした。その結果、変速ショック時の減速度の急変が後のブレーキ制御に与える影響がなくなり、運転者に違和感を与えることが防止される。
(もっと読む)
ブレーキ制御装置
【課題】フィードバック制御則を用いたブレーキ制御において、良好なブレーキフィーリングを実現する。
【解決手段】目標減速度の補正に際し、ブレーキペダルの踏み込み速度の絶対値が大きくなるほど、比例ゲインPgainが小さくなるようにし、さらに積分補正係数HoseiIを小さくして積分ゲインの影響が小さくなるようにしている。これにより、車両の減速度が目標減速度に到達するまでの間において、ずれたフィードバックゲインの過渡的な影響を低減することができ、その間の減速度の変動を抑制することができる。また、ブレーキペダルの踏み込み速度が緩和されたときの積分ゲインの影響が小さくなり、ブレーキフィーリングを安定に保つことができる。
(もっと読む)
車両安定化制御装置
【課題】車輪速度を利用して求めるヨーレートを車両安定化制御の開始条件として用いる車両安定化制御装置において、適切に車両安定化制御中の制御量を決定できるようにする。
【解決手段】車両安定化制御の開始条件の判定には、駆動輪の車輪速度の差に基づいて求めた第2のヨーレート(駆動輪ヨーレート)と操舵角および車速に基づいて求めた目標ヨーレートを用い、車両安定化制御における制御量の決定には、ヨーレートセンサ7bの検出信号から求めた第1のヨーレートと操舵角および車速に基づいて求めた目標ヨーレートを用いる。つまり、車両安定化制御の開始条件の判定のときには車輪速度を利用して求められるパラメータを用い、車両安定化制御における制御量の決定のときには車輪速度を利用しないで求められるパラメータを用いる。
(もっと読む)
車両挙動推定装置およびそれを用いた車両制御システム
【課題】車両運動の線形領域および非線形領域の全領域にわたって実車両の挙動を正確に再現可能で、しかも物理的な意味合いを理解し得る車両運動モデルを備える車両挙動推定装置およびそれを用いた車両制御システムを提供する。
【解決手段】測定装置により測定された情報V、δに基づいて車両の挙動を表す量の推定値γ、aを出力する車両挙動推定装置1、18、21であって、入力された情報V、δに基づいて車両挙動の数理モデルに従って推定値γ、aを算出する推定値算出手段2と、推定値算出手段2における数理モデルに用いられる数値kf、krを修正するためのニューラルネットワークで構成された修正手段3とを備える。
(もっと読む)
1 - 20 / 29
[ Back to top ]