
Fターム[3D114GA03]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め手段 (485) | 回転を伴うもの (35)
Fターム[3D114GA03]に分類される特許
1 - 20 / 35
車体のドア開け方法及び装置
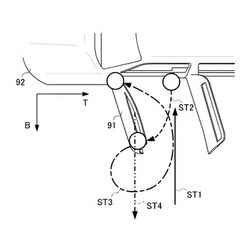
【課題】ロボットの設置箇所を小さくすると共に、サイクルタイムの短縮を図ることが可能な、ドア開け方法及び装置を提供すること。
【解決手段】双腕ロボットにおいては、2つのアームがS1軸及びS2軸の各々によって回動される。その結果、S1軸を用いた回動により、ドア開き動作(ステップST2)が実現される。そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側に入り込む移動(ステップST3)が実現される。この場合の移動は、ドア91の方向を向くような移動である。その結果、ドア把持位置まで移動したとき(ステップS26)、双腕ロボットは、ボルト緩め動作を行い易い姿勢となっている。
(もっと読む)
テールゲート組み付け調整治具、組み付け方法

【課題】テールゲートを支持した状態で位置決めしながらルーフパネルに組み付ける。
【解決手段】テールゲートを支持する枠体2と、枠体2の下部に配設されテールゲート開口部W1に設けた位置決め穴(W21)に挿入する位置決めピン24と、枠体2の下部に配設され、テールゲートの下部に設けた開口穴部(W4)を規制してテールゲートを位置決めする位置決め部4と、枠体2の上部の両側に配設され車体Wの後部の両側面に形成された当接形状部(W3)に係合させて枠体2を位置決めする位置決め係合部3と、枠体2の上部に配設されルーフパネルRPとテールゲートとを車体Wの前後方向に沿う方向に挟持して中央部を位置決めする第1の位置決め手段5と、ヒンジブラケット8の近傍に位置するように枠体2に配設され、ルーフパネルRPとテールゲートに固定されたヒンジブラケット8を挟持して位置決めする第2の位置決め手段6と、を備えた。
(もっと読む)
組付治具を備える治具装置
【課題】治具装置において、組付対象物に組み付けられる物品の組付位置の設定精度の向上を図り、かつ治具装置の設計の自由度を大きくする。
【解決手段】位置決め部材20,30は、回動中心線L1,L2を中心に回動可能に基台10に設けられ、位置設定部材40,50は、基準点P1(,P2)に対応する基準点対応部位Q1,Q2を有するスケール43,53と、基準点対応部位Q1,Q2に当接するダイヤルゲージ47,57とを備える。基準点対応部位Q1,Q2は、回動中心線L1,L2を中心とすると共に回動中心線L1,L2と基準点P1(,P2)との距離を半径とした仮想円上に位置する。ダイヤルゲージ47,57は、基準点対応部位Q1,Q2に当接した状態で回動中心線L1,L2を中心に回動する位置決め部材20,30の回動位置を変更可能である。
(もっと読む)
ガラス調整治具およびガラス調整方法
【課題】車両用サッシュレスドアのドアパネルに組み付けられる窓ガラスの組み付け精度を高めることができるガラス調整治具を提供することを課題とする。
【解決手段】車両用サッシュレスドア1のドアパネル2に組み付けられる窓ガラス3の組み付け位置を調整するためのガラス調整治具20であって、ドアパネル2に取り付けられるフレーム部材30と、ドアパネル2に組み付けられた窓ガラス3の縁部に当接することで、窓ガラス3を位置決めする規制部材50,60を有するガラス位置決め機構40と、を備え、ガラス位置決め機構40は、フレーム部材30に設けられており、フレーム部材30は、ドアパネル2のヒンジ部2a,2aおよびドアロック部2bに係合されることで、ドアパネル2に対して位置決めされる。
(もっと読む)
ドア塗装用治具
【課題】センタレールから塗装膜が飛散しにくいと共に、スライドドア及びドア開口部における縁部の塗装を容易に行うことができるドア塗装用治具を提供する。
【解決手段】スライドドア11の車両内側に、水平方向に回動可能なドア支持部2が取り付けられている。また、車両本体に固定配置され、鉛直方向を向く回転軸線を中心としてドア支持部2を回動可能に保持する回転部3を備える。ドア支持部2は、スライドドア11と接続する第1接続部4と、回転部3と接続する第2接続部5との間の距離が、スライドドア11の移動に伴って変化するよう構成されている。そして、スライドドア11が車両のドア開口部7を閉じる閉位置と、スライドドア11の後端部110が車両後方へ最も移動した開位置と、スライドドア11の後端部110が車両側方へ最も移動したワイド開き位置との間で、スライドドア11を移動可能に保持するよう構成されている。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
操縦ロボット
自動車のハンドル(1)に取り付けられる操縦ロボットは、環状の電動機(6)の回転子(5)に取り付けられた自身のハンドル(2)を有している。使用時に回転子の前面に取り付けられているものは、環状の取付板(9)であり、取付ボルト(11)を受け入れるためにわずかに内側に突き出している3つのタブ(10)を備えて構成されている。リング(14)からなる挟着部材(12)は、その周囲に等間隔で配置され、3つの穴を有する放射状の突起(15)を有している。この突起は、前記挟着部材(12)が自動車のハンドル(1)に一時的に取り付けることができるため、3つの挟着固定部材(16)のための取付け具を提供できる。前記固定子は、検査もしくは調査のときに操縦操作する電動機によって駆動される操縦トルクに反作用する一対のトルク反作用の突起(16)を有している。操縦ロボットの中央が開口している構造になっているため、制御装置を搭載したハンドルは通常通りに動作させることができる。 (もっと読む)
ホイール用ウェイト取付装置及びその使用方法
タイヤ・ホイール組立体TWのホイールWのためのウェイト取付装置10,100,200が開示される。ウェイト取付装置10,100,200は、アーム部12と、アーム部12に連結された取付装置部14,202と、を備える。取付装置部14,202は、ラジアル方向に延在するフランジ部16を備える。ラジアル方向に延在するフランジ部16は、アーム部12に連結されている。第1のプランジャ部18,18a,18bは、一つ以上の第1のラジアルアーム28によって、ラジアル方向に延在するフランジ部16に移動可能に連結されている。方法についても開示される。 (もっと読む)
塗装装置およびそれに関する方法
本発明は構成部品2を塗装するための塗装装置1であって、特に車両本体またはその部分を塗装するための、アトマイザーの位置を定める多軸塗装ロボット6、7と、塗装ロボット6、7を制御するためのロボット制御装置と、そしてロボット制御装置を備えた制御キャビネット8、9とからなるものに関する。本発明は、制御キャビネット8、9を、機械的に塗装ロボット6、7を支える荷重支持形の支柱の形とすることを提案する。本発明は、さらに関連する方法に関する。 (もっと読む)
自動車用ウエザストリップ組付け治具及び組付け方法
【課題】ウエザストリップを簡単な治具で容易にフランジに取付けられる組付け治具と組付け方法を提供する。
【解決手段】自動車用ウエザストリップの組付け治具において、組付け治具20は、上辺フレーム26、車外側フレーム27と車内側フレーム30から構成されるコ字形のフレームを有する。車外側フレームの上部の内面に上部押えローラー23を設け、車外側フレームの下部には、フランジガイドローラー24とワーク送りローラー25を設ける。車内側フレームの先端部分には、ウエザストリップ10の車内側側壁12の先端に当接して車内側側壁を車内方向に撓ませる開口用ローラー31を設け、開口用ローラー31の後部に車内側側壁をフランジ側に押える側壁押えローラー34を設けたことを特徴とする自動車用ウエザストリップ組付け治具及び組付け方法である。
(もっと読む)
ウインドシールド取り付け装置及び使用方法
車両のウインドシールドを交換する際に技術者1人で使用するためのウインドシールド取り付け装置である。装置は、車両の側窓に貼り付け可能な第1組立体と、車両に設置されようとしているウインドシールドに貼り付け可能な第2組立体を含んでいる。第2組立体は、第1組立体に連結し、第1組立体に対して軸回転するように適合されている。 (もっと読む)
車両用ドアシャーシのテープ付着装置
【課題】車両用ドアシャーシにテープを付着するためのテープ付着装置を提供すること。
【解決手段】ベース体1の上部には、ガイドバー11及び加圧ローラー支持台12によって長方形の加圧ローラー設置キャップ4が一体に形成され、ベース体1及び加圧ローラー設置キャップ4の内側には、外周に加圧ローラー5の設置された加圧ローラー支持軸51を位置させて、加圧ローラー支持軸51の一側に弾性部材14を付勢させて形成する車両用ドアシャーシのテープ付着装置において、長方形の加圧ローラー設置キャップ4の一側の両側部を面取りして切開面41を形成した後、その外周面に軟質のクッション材42を被覆し、加圧ローラー5の後方に位置した加圧ローラー支持台12に静電気防止用のプラスチックパンネル43を付着した。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
オーバーヘッド移送システムとそれを有する浸漬処理設備
表面処理設備内で対象を移送、特に車両ボディを移送するためのオーバーヘッド移送システムは、少なくとも1つの移送キャリッジ(208)を有し、その移送キャリッジが固定装置(212)を有しており、その固定装置に少なくとも1つの対象(204)を固定することができる。移送キャリッジ(208)は、駆動手段(222、224)によって、それを支持するレール(216)に沿って走行可能である。固定装置(212)は、垂直の回転軸(240)を中心に回転可能に軸承されている。さらに、処理液によって充填可能であり、その処理液内に処理すべき対象(204)を浸漬することができる、少なくとも1つの浸漬槽(202)を有する浸漬処理設備が、記載されている。この浸漬処理設備は、移送設備を有しており、その移送設備が、処理すべき対象(204)を浸漬槽(202)へ近づけ、浸漬槽(202)の内部空間内へ移動させ、浸漬槽(202)から取り出して、その浸漬槽から離れるように移動させる。 (もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
パネルへの部品取り付け方法及びその取り付け装置
【課題】部品把持具及び締め付け具を用いて,パネルへの部品締め付けを自動的に且つ確実に行い得るようにした,パネルへの部品取り付け方法を提供する。
【解決手段】パネルDaの一側面7に部品Cを,パネルDaの他側面8側からパネルDaのボルト孔2を貫通する取り付けボルト13を該部品Cのねじ孔9に螺合して締め付けるに当たって,締め付け具21に保持した取り付けボルト13を,その軸方向中間部までボルト孔2に挿通する第1工程と,部品Cを部品把持具29に弾性支持して,該部品Cのねじ孔9の開口部を取り付けボルト13の先端部に押し当てる第2工程と,取り付けボルト13及び部品Cの押し合い状態を維持しながら締め付け具21の正転作動により該取り付けボルト13を該ねじ孔9に螺合,緊締する第3工程とを実行する。
(もっと読む)
車両用ウエザーストリップ取付装置
【課題】ウエザーストリップの取り付けを確実且つ低コストに行うことができる車両用ウエザーストリップ取付装置を提供する。
【解決手段】車両用ウエザーストリップ取付装置10は、車体の嵌合部20にウエザーストリップ22を取り付けるための装置である。該車両用ウエザーストリップ取付装置10は、ウエザーストリップ22を嵌合部20に嵌め込むための回転自在なローラ46及びノズル40を有するアッパー側取付ユニット36と、ローラ90及びノズル86a、86bを有するサイド側取付ユニット38とを備える。これらアッパー側取付ユニット36及びサイド側取付ユニット38は、機台34を介してロボットアーム28a、28bにより移動可能な状態で支持されている。
(もっと読む)
ウェザーストリップ挿入工具および挿入方法
【課題】肉体的作業負荷を軽減しかつ良好な作業性を有するウェザーストリップ挿入工具および挿入方法を提供する。
【解決手段】
ウェザーストリップと当接し、対象フレームのフランジに挿入するための押圧力を発生させるためのローラ130、ローラ130に配置され、ウェザーストリップとの当接を案内するためのガイド部材132、ローラ130を浮動自在に支持するための浮動支持手段160、および、ローラ130を回転させるための回転軸152を有する。
(もっと読む)
1 - 20 / 35
[ Back to top ]