
Fターム[3D232DA21]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041)
Fターム[3D232DA21]の下位に属するFターム
位置 (74)
車速 (4,162)
前後加速度(ジャークを含む) (471)
横方向変位 (67)
横速度 (52)
横加速度(ジャークを含む) (956)
ヨー角変位 (138)
ヨーレイト(ヨー角速度) (1,419)
ヨー角加速度(ジャークを含む) (47)
ロール (107)
ピッチ (34)
車体横滑り角、角速度、角加速度 (165)
車輪横滑り角、角速度、角加速度 (95)
上下方向変位(動的なもの) (24)
上下方向速度、加速度(ジャークを含む) (55)
ホイールアライメント量(トー、キャンバ、キャスタ) (52)
Fターム[3D232DA21]に分類される特許
21 - 40 / 123
車両運動制御システム
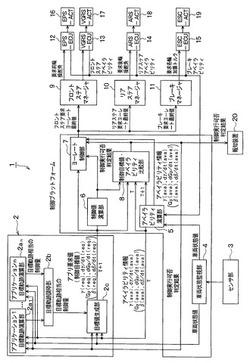
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
電気自動車およびプログラム

【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
自動二輪車の操舵装置
【課題】パワーアシスト手段で低速時の自動二輪車の姿勢制御を行い、レシオ可変手段を用いて全速度域での最適な操舵比が得るようにした自動二輪車の操舵装置を提供する。
【解決手段】ハンドル5へ入力される入力トルクMzに応じて第2モータM2による補助操舵力を与えるパワーアシスト手段W1と、ハンドル5の回動角度と前輪WFの操舵角度との比率である操舵比jを第1モータM1によって変更する操舵比可変手段S1と、車速Vを検知する車速検知手段92と、入力トルクMzを検知する入力トルク検知手段48と、操舵比jを検知する操舵比検知手段92と、車体のロール方向の角速度ωを検知するロール角速度検知手段93と、第1,第2モータM1,M2を制御する制御部100とを具備し、制御部100は、第2モータM2を車速V、入力トルクMzおよびロール方向の角速度ωに基づいて制御し、第1モータM1を車速Vおよび操舵比jに基づいて制御する。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
自動車のパワーステアリングシステムにおいて、ステアリングホイールのトルク設定値を決定するための方法
【課題】パワーステアリングシステムにおいて、自動車が如何なる状況にあってもドライバに快適な乗り心地を提供することができるように、各種のパラメータ及び情報に基づいて、トルク設定値又は荷重設定値を決定する。
【解決手段】トルク設定値又は荷重設定値は自動車の横加速度に基づいて決定され、横加速度は、主にラックに作用する推定荷重に基づいて決定され、さらに他の方法によって得られる横加速度を重み付けして決定されることが好ましい。
(もっと読む)
車両用路面反力推定装置
【課題】車両用路面反力推定装置において、駆動輪のセルフアライニングトルクを算出してから設定車両速度以上で路面反力を推定することで、路面反力を精度良く推定可能とし、また、車両が一定舵角の操舵時だけではなく、車両が動的に操舵している時でも路面反力を推定可能とする。
【解決手段】制御手段14は、車両速度検出手段15から検出される車両速度とハンドル切れ角検出手段16から検出されるハンドル切れ角とを用いてセルフアライニングトルクを算出する算出手段14Aと、車両速度検出手段15から検出された車両速度が予め設定された設定車両速度以上になった場合に算出手段14Aにより算出されたセルフアライニングトルクと予め設定された定数とに基づいて路面反力を推定する推定手段14Bとを備えている。
(もっと読む)
車両の後輪操舵制御装置
【課題】指示トー角への実トー角の追従性を向上させる車両の後輪操舵制御装置を提供する。
【解決手段】車両の左右後輪の指示トー角を設定する指示トー角設定手段119と、車両の運動状態量を検出する状態量検出手段17と、を備え、指示トー角と検出された実トー角との偏差に基づき操作量を算出し、この操作量に基づいて車両の左右後輪に設けられたアクチュエータ11を作動させることによってトー角を変化させる後輪操舵制御装置である。本装置は、偏差を積分する積分手段124と、前記アクチュエータの制御特性に起因した前記指示トー角、前記実トー角、もしくは前記偏差の変動に応じて前記積分手段の偏差の積分量を減少させる指令を行うリセット指令手段120とを備える構成とする。
(もっと読む)
車両用操舵装置、車両用操舵方法、車両用操舵装置付き車両
【課題】運転者に違和感を与えることのない車両用操舵装置を提供する。
【解決手段】前輪2FL、2FRが転舵を行う操向輪となっている。また、操舵機構4と転舵機構5とが機械的に切り離された、いわゆる、ステアバイワイヤシステムである。運転者の操舵力に応じた第1操舵反力と、操向輪2FL、2FRに加わる転舵反力に応じた第2操舵反力とに基づいて、ステアリングホイール6へ付与する操舵反力を制御し、操向輪2FL、2FRの転舵角が大きくなるほど操舵反力のうち第1操舵反力の割合を小さくするようにした。
(もっと読む)
車両走行支援装置及び車両走行支援方法
【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
後輪舵角制御装置
【課題】後輪舵角の限度を路面の凹凸の状態に基づいて決定し、後輪舵角を目標値通りに制御できる機会を多くすること。
【解決手段】車輪が路面の凹凸によりバウンドしたりリバウンドしたりすると、車輪が転舵可能な角度の上限値(限度)も変化する。一般的には、車輪がバウンドする(車高が小さくなる)と、車輪が車体に接近し、隙間が小さくなるため限度も小さくなる。そこで、後輪12が通過する路面の凹凸の状態が、前輪10の上下方向の挙動に基づいて予測され、その予測された路面の凹凸の状態に基づいて限度が決定される。そして、後輪12がその路面を通過する場合に、後輪12の転舵角度が、決定された限度を超えない大きさに制御される。
(もっと読む)
車両制御装置及び車両制御方法
【課題】運転者に違和感を与えることなく車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵アクチュエータ7及び後輪操舵アクチュエータ8を駆動制御して前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急度判定値Kd)が高いほど各輪に付与する制動力を大きく設定する。これにより、緊急操舵時の車両の応答性を確保しつつ安定性を向上することができる。
(もっと読む)
車両用操舵装置
【課題】操舵反力特性をコンベンショナルな操舵装置の操舵反力特性に近づけることができる車両用操舵装置を提供する。
【解決手段】反力モータ回転角度に、捩れ角に対して第1係数を乗算した値を加算して第一操舵角を算出する第一操舵角算出部19aと、反力モータ回転角度に、捩れ角に対して第1係数よりも大きな第2係数を乗算した値を加算して第二操舵角を算出する第二操舵角算出部20aと、第一操舵角に基づいて転舵モータを制御する転舵制御部19と、第二操舵角基づいて反力モータ5を制御する反力制御部20とを備える。
(もっと読む)
パワーステアリング装置
【課題】ステアリングに付与する付加摩擦トルクの制御を、車両の振動特性を考慮して適切に実行することが可能なパワーステアリング装置を提供する。
【解決手段】パワーステアリング装置は、車両に搭載され、トルク付与手段と、付加摩擦トルク変更手段と、を備える。トルク付与手段は、ステアリングに付与すべき付加摩擦トルクを設定し、付加摩擦トルクを付与する制御を行う。付加摩擦トルク変更手段は、車両の振動特性に基づき付加摩擦トルクを変更する。
(もっと読む)
電動パワーステアリング装置
【課題】運転者の期待に則した操舵アシストを行うと共に、電動モータの温度上昇等を的確に抑制する。
【解決手段】操舵トルクTが操舵トルクしきい値Tth以上であり、車速検出値Vが車速しきい値Vth以下であり、舵角速度判定部dδが舵角速度しきい値dδ以下であるときに補償後トルク指令値IM*′を制限する。このとき、操舵トルクしきい値Tthを車速検出値Vに応じて設定し、舵角速度dδがその舵角速度しきい値dδth以下であるときは、車速検出値Vが大きいときほど、操舵トルクしきい値Tthがより大きな値となるように、操舵トルクしきい値Tthを設定する。操舵トルクTが同一であっても車速検出値Vの大きさに応じて、操舵補助トルクを制限したり、しなかったりすることができ、運転者の期待に、より則した操舵アシストを行うことができる。
(もっと読む)
路面摩擦係数推定装置
【課題】ノイズの影響を大きく受ける場合において路面摩擦係数を正確に推定し得るような路面摩擦係数推定装置を提案する。
【解決手段】連続値変換部B3b-1は、離散時間周波数伝達特性G(z)を連続時間周波数伝達関数G(s)に変換し、位相情報抽出部B3b-4は、所定の位相情報抽出周波数f[Hz]と連続時間周波数伝達関数G(s)とから、当該周波数f[Hz]でのヨーレート位相遅れ情報θ(f|t)[deg]を抽出する。この位相遅れ情報θ(f|t)[deg]から、予定の路面摩擦係数マップを基に、走行路の路面摩擦係数を検索する。上記位相情報抽出周波数f[Hz]を適切に決定することで、ノイズの影響を受けにくい操舵周波数における情報のみを用いたり、路面変化に対する感度が高い操舵周波数における情報のみを用いることができ、これにより、ノイズが多い場合においても、路面摩擦係数を正確に求めることができる。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
路面μ推定装置及びその方法
【課題】スリップが発生する前に、走行路面の路面μを推定する。
【解決手段】路面μ推定装置は、走行時の車輪のセルフアライニングトルクを検出するセルフアライニングトルク検出部1と、走行時の車輪のスリップ角を検出するスリップ角検出部2と、検出したセルフアライニングトルクとスリップ角との比、基準路面について車輪のセルフアライニングトルクと車輪のスリップ角との相関関係、及び検出したセルフアライニングトルク又は検出したスリップ角の少なくとも一方を基に、該セルフアライニングトルクと該スリップ角との関係を推定する路面μ算出部3と、を備える。
(もっと読む)
21 - 40 / 123
[ Back to top ]