
Fターム[3D233CA20]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 電気系、電動機の状況 (2,185)
Fターム[3D233CA20]に分類される特許
21 - 40 / 2,185
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させることができる、電動パワーステアリング用電子制御ユニットを提供する
【解決手段】電動パワーステアリング用電子制御ユニット(ECU1)は、第1の面実装部品(制御用面実装部品110)が実装される第1基板(制御基板11)と、第1の面実装部品より許容電流容量が高い第2の面実装部品(パワー用面実装部品120)が実装される、第1基板と略同一部品実装面積を有する唯一の第2基板(パワー基板)とを有し、第1基板と第2基板とを積層した基板実装構造から成る。
(もっと読む)
電動パワーステアリング用の電子制御ユニット

【課題】小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットは、外部のバッテリの正極及び負極の電位を入力する第1及び第2の入力端子B+,B−を有する外部コネクタと、電動モータに駆動信号を供給するスイッチング回路、駆動信号の元となる電源電圧を平滑する電解コンデンサ210及びスイッチング回路を制御する制御回路を有する制御基板200と、制御基板200を格納するユニットカバーと、を備える。制御基板200は、ノーマルフィルタとして機能するコイル220及びコモンフィルタとして機能する第1〜第4のセラミックコンデンサC1〜C4を有する。C1の容量は、C3の容量と同じであり、C1の容量よりも小さいC2の容量は、C4の容量と同じである。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
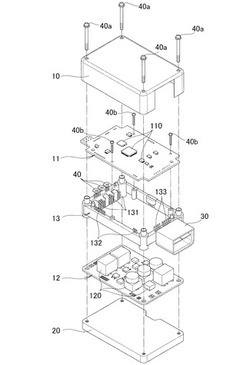
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させる。
【解決手段】電動パワーステアリング用電子制御ユニットに含まれる第1基板11と第2基板12は、外部接続コネクタ30が一体形成されたコネクタケース13を介して積層され、コネクタケースの第1の縁部と第2の縁部には、第1の面実装部品110と第2の面実装部品120とを接続するインサートモールド成形された端子群131,132,133がそれぞれ実装される。第2基板12に実装された第2の面実装部品120のそれぞれは、第1の縁部に実装された端子群と第2の縁部に実装された端子群のうち、近くに位置する端子群に選択的に接続される配線レイアウト構造を有する。
(もっと読む)
電動パワーステアリング用の電子制御ユニット
【課題】 小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を構成する制御装置のハウジングおよびヒートシンクとして、合成樹脂製であって、ECU一体型電動パワーステアリング装置の制御装置に要求される、放熱性と耐久性を満たすものを提供する。
【解決手段】制御装置4の回路基板41を収容するハウジング42は、ケース421と蓋422とからなる。ヒートシンク43は、ケース421の下側の電動モータ3と干渉しない位置に取り付けられている。ケース421と蓋422とヒートシンク43を、ポリフェニレンサルファイド(PPS)と、炭素繊維と、アルミナとからなり、炭素繊維の含有率が15質量%以上40質量%以下であり、アルミナの含有率が5質量%以上10質量%以下であり、炭素繊維とアルミナの合計含有率が20質量%以上50質量%以下である樹脂組成物の射出成形により形成する。
(もっと読む)
電子制御装置
【課題】電源電圧の低下および回復があった場合に、制御部と開閉手段を保護する。
【解決手段】電子制御装置100は、モータ駆動回路11と、電源リレー19と、制御部1と、コンデンサ20と、電源電圧検出部2と、モータ/コンデンサ電圧検出部23とを備える。制御部1は、電源リレー19をON状態にして、モータ駆動回路11の制御を開始した後、電源電圧検出部2で検出された電源電圧の低下を察知すると、モータ駆動回路11の制御を停止し、電源リレー19をOFFし、スリープモードに移行する。その後、制御部1は、電源電圧が上基準値以上で、かつ、電源電圧とコンデンサ20の電圧との電位差が所定値より小さいことを検出した場合に、スリープモードを解除した状態で、電源リレー19をONし、モータ駆動回路11の制御を再開する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
ブラシレスモータ
【課題】ブラシレスモータと被取付対象物との固定剛性を高めることができ、かつ収納部をカバー部材で確実に覆うことができるブラシレスモータの提供。
【解決手段】モータケース41の開口部分を覆うブラケット部材51に、各モータ側導電板MPおよび各コントローラ側導電板CPの他端側が配置され、減速機ケースに取り付けることで当該減速機ケースにより覆われる取付部52と、モータケース41の径方向外側に位置し、内部に制御装置が収納され、カバー部材54により減速機ケース側に開口した開口部分が覆われる収納部53とを一体に設けた。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
車両用制御装置
【課題】駆動システムの未始動時においても、車両ずり下がりを防止するための十分な制動力を発生させることができるとともに、十分な操舵アシスト力を発生させることができる車両用制御装置を提供する。
【解決手段】ハイブリッド車両に搭載される車両用制御装置であって、ハイブリッドシステムの始動および未始動を検出するHVECUを備え、HVECUが、ハイブリッドシステムの未始動時(ステップS1)に、シフトポジションセンサによりPレンジ以外のシフトレンジが検出され、かつ車速Vが発生したこと(ステップS2)を条件として、主バッテリと高圧回路とが電気的に接続されるようシステムメインリレーを制御する。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
電動パワーステアリング制御装置
【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
21 - 40 / 2,185
[ Back to top ]