
Fターム[3D244AB01]の内容
Fターム[3D244AB01]に分類される特許
61 - 80 / 501
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
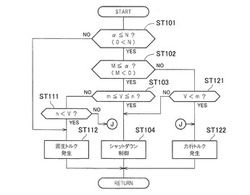
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
走行制御装置

【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車群走行制御装置
【課題】車群内の一部の車両が車群を離脱する場合にも、車群を維持することができる車群走行制御装置を提供する。
【解決手段】
車群内順序決定部106により、各車両は、車群内の自車両の順序である車群内順序を決定し、走行計画とともに、車両IDおよび車群内順序を送信機から同報送信する。追従車両は、複数の先頭車両走行計画を取得した場合、先頭車両走行計画とともに送信されてくる車両IDと車群内順序に基づいて、それら複数の先頭車両走行計画を送信した各先頭車両の車群内順序を決定し、且つ、その決定した各先頭車両の車群内順序と自車両の車群内順序とに基づいて、自車両の走行計画を決定するために用いる先頭車両走行計画を選択する(先頭車両選択部108)。これにより、自車両が追従すべき先頭車両走行計画を誤らずに用いて追従車両走行計画を決定することができるので、車群内の一部の車両が車群を離脱する場合にも車群が維持される。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
走行制御装置
【課題】車間距離変更時において衝突の不安感を乗員に与える可能性を低減する走行制御装置を提供する。
【解決手段】走行制御装置1は、無線制御ECU26の車車間通信によって、自車両と周辺車両との相対速度を取得し、前方車間距離センサ21aよって自車両と周辺車両との車間距離を検出する。車両制御ECU10は、上記相対速度と上記車間距離とに基づいて、TTCを演算し、自車両と周辺車両との車間距離を変更すべく自車両の加減速を行う場合に、車間距離の変更中におけるTTCの最小値が所定の衝突予測時間基準値を下回らないように、自車両の加減速のスケジュールを立案する。
(もっと読む)
車両の運転支援装置
【課題】停止時に意図しないタイミングで自車両が前進することを的確に防止して違和感のない運転支援を実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、操作入力からの経過時間tがドライバの操作入力直後を判定するキャンセル判定時間Tth1よりも長いことを判定し、且つ、先行車が設定車速Vth未満となる停止或いは略停止状態にあると判定したとき発進許可をキャンセルする。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の運転支援装置
【課題】停止保持制御から追従走行制御への移行を違和感なく実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、停止中の前記先行車との車間距離Lが大値側に変化したとき車間距離Lの変化に伴って大値側に更新される第1の閾値Dth1と、先行車の車速Vfが高くなるほど大値側に変更される第2の閾値Dth2とを演算し、これらの何れか大きい値に基づいて前記判定閾値Dthを可変設定する。
(もっと読む)
車両制御装置
【課題】駆動源としてエンジンとモータを用いる車両において、先行車に追従走行している時に先行車が加速した場合の燃費を抑制することができる車両制御装置を提供する。
【解決手段】駆動源としてエンジンとモータを用いる車両において、先行車までの距離を検出する車間距離検出手段と、前記先行車との相対速度を検出する相対速度検出手段と、前記相対速度検出手段によって検出された相対速度を微分し、相対加速度を算出する相対加速度算出手段と、自車速度を検出する自車速検出手段と、前記車間距離検出手段と前記相対速度検出手段と前記相対加速度検出手段と前記自車速検出手段によって検知された車間距離、相対速度、相対加速度、自車速度にもとづいて、先行車に追従するために必要な前記モータの出力トルクを算出する出力トルク算出手段と、前記出力トルク算出手段で算出されたトルクを出力するように前記モータを制御する制御手段とを備えた構成とする。
(もっと読む)
無段変速機の変速制御装置
【課題】クルーズ制御中の過渡時における無段変速機の変速ハンチングを抑制する。
【解決手段】クルコン要求馬力演算部33はクルーズ目標車速Soと実車速Sとの速度差ΔSからクルコン要求馬力HPsを求め、クルコン要求トルク演算部34はクルコン要求馬力HPsとエンジン回転数Neとに基づいてクルコン要求トルクTcsを求める。クルコン用アクセル開度演算部37はクルコン要求トルクTcsとエンジン回転数Neとに基づきクルコン用アクセル開度θhaの特性曲線が等馬力曲線に沿って設定されているエンジントルクマップを参照して、クルコン用アクセル開度θhaを設定する。目標プライマリ回転数演算部25はクルコン用アクセル開度θhaと実車速Sとに基づき変速線マップを参照して目標プライマリ回転数Npoを設定する。変速制御部26は目標プライマリ回転数Npoと実車速Sとに基づき目標変速比を求めて変速制御を行う。
(もっと読む)
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
ハイブリッド車両用駆動装置の制御装置
【課題】車重変化、走行抵抗、登降坂を加味して走行を制御することができドライバビリティのよいハイブリッド車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド車両用駆動装置の制御装置であって、被駆動部に伝達される駆動力と車速から導出される平坦路における走行抵抗とに基づいて算出した理論加速度と、単位時間の車速の変化から算出した実加速度との乖離量から登降坂レベルを算出する登降坂レベル算出部と、被駆動部に伝達される駆動力と、車速から導出される平坦路における走行抵抗と、登降坂レベルとに基づいて算出した期待加速度を積分して目標車速を算出する目標車速算出部と、目標車速と実際の車速との差異を電動機で補正するように電動機を制御するフィードバックコントローラと、を備える。
(もっと読む)
車両の制御装置
【課題】目標車速への追従性を犠牲にすることなく減速時の車速のアンダーシュートを抑制し、走行フィーリングの悪化を防止する。
【解決手段】減速燃料カットによって実車速が低下し、実車速と目標車速との偏差が車速差ΔVになったとき、目標車速を初期値として疑似目標車速を設定する。そして、演算周期毎に、実車速を上回らない範囲で疑似目標車速を増加させていく。このとき、疑似目標車速の増加に伴って、要求加速度が極小値から減速燃料カットからの復帰に必要な加速度に向かって増加していく。減速燃料カットからの復帰後は、疑似目標車速を徐々に目標車速に近づけていき、要求加速度を等速運動に必要な加速度(加速度=0)に向かって増加させる。これにより、目標車速への追従性を犠牲にすることなくアンダーシュートを抑制しつつ実車速を目標車速に一致させることができる。
(もっと読む)
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
61 - 80 / 501
[ Back to top ]