
Fターム[3D246GB08]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 挙動制御 (1,026) | オーバステア(スピン状態)抑制 (123)
Fターム[3D246GB08]に分類される特許
1 - 20 / 123
車両用ブレーキ液圧制御装置
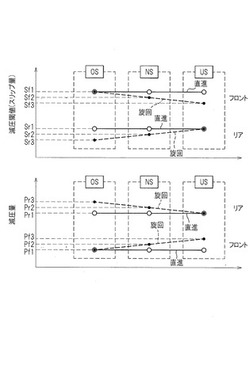
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置

【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
(もっと読む)
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力から摩擦制動力へのすり替えの応答性をより高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ回路(管路22P,22S,25FL,25FR)上であってソレノイドアウトバルブ26FL,26FRよりもポンプPの吸入部10aに設けられると共に、ブレーキ回路(管路21P,21S,22P,22S)に接続するリザーバ24P,24Sと、ポンプMP、MSが回転駆動されているときに吐出弁20P,20Sからのブレーキ液の吐出を制限するポンプ吸入遮断バルブ29P,29Sと、を備えた。
(もっと読む)
車両のブレーキ制御装置
【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】制動力制御装置はブレーキペダル31の操作により流体に圧力を発生させるマスタシリンダ33と、流体の圧力により制動力を発生させる制動装置37FL,37FR,37RL,37RRと、マスタシリンダと制動装置とを接続する配管と、配管内における流体の流れを遮断する第1の電磁弁(マスタカット弁41等)と、制動装置に流れる流体の圧力を保持する第2の電磁弁(保持弁50等)と、制動装置に流れる流体の圧力を減圧するために操作される第3の電磁弁(減圧弁58等)と、を備え、第1の電磁弁を制御する第1の差圧指示量と、第2の電磁弁を制御する第2の差圧指示量と、の差を所定値に制御し、第3の電磁弁を所定時間開くことにより制動力を制御する。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することにある。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
(もっと読む)
ブレーキ制御装置
【課題】 ポンプの作動頻度を抑制できるブレーキ制御装置を提供する。
【解決手段】 2系統のブレーキ配管系のうちP系統に設けられ、マスタシリンダM/Cのプライマリ室15aとホイルシリンダW/Cとの間の第1ブレーキ回路(管路11,18)に配置されたゲートアウトバルブ12と、第1ブレーキ回路であってプライマリ室15aとゲートアウトバルブ12との間から分岐する還流油路部17を有する分岐油路16と、還流油路部17に設けられたストロークシミュレータバルブ27と、ストロークシミュレータバルブ27を経由しマスタシリンダM/Cからのブレーキ液が流れ込むリザーバ34と、リザーバ34を介してブレーキ液を吸入して還流油路部17から分岐油路16に吐出するポンプ35と、を備えた。
(もっと読む)
ブレーキ制御装置
【課題】 回生協調制御時のペダルフィールの向上を図ることができるブレーキ制御装置を提供する。
【解決手段】 ブレーキ液が流入可能な液吸収部15と、第1ブレーキ回路(管路11,18)上であってマスタシリンダM/Cとゲートアウトバルブ12との間に設けられたカットオフバルブ14と、カットオフバルブ14と並列にマスタシリンダM/CからホイルシリンダW/C側へ向かうブレーキ液の流れのみを許容するチェックバルブ34と、カットオフバルブ14とゲートアウトバルブ12との間から分岐し液吸収部15に接続する管路16と、第1ブレーキ回路のマスタシリンダM/Cとカットオフバルブ14との間から分岐し、リザーバ23に接続する管路35と、管路35に設けられマスタシリンダM/Cからリザーバ23へのブレーキ液の流れ込み量を調整するストロークシミュレータバルブ36と、回生制動装置の回生状態に応じて各弁とポンプPを作動させブレーキ液圧を制御するブレーキコントロールユニットBCUを備える。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両運動制御システム
【課題】車両安定性の低下を簡易に予測できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、車輪速度、車体速度、前後加速度および横加速度、実ヨーレート、操舵角、アクセル開度、ブレーキ踏力など車両状態量に基づいて、耐ロールオーバー制御、US/OS抑制制御などの車両運動制御を行う制御装置5を備えている。また、制御装置5は、現在の車両状態量と、車両状態量の履歴および車両運動制御の実施履歴を含む過去の制御履歴とに基づいて、将来的な車両安定性の低下を予測する安定性低下予測部53を有している。
(もっと読む)
車両の制御装置
【課題】車両の旋回性能を向上させるために車両の駆動力および制動力を制御する場合に、共振の発生によるドライバビリティの低下を回避して、可及的に大きな旋回性能の向上効果を得ることができる車両の制御装置を提供すること。
【解決手段】車両の旋回走行時に駆動トルクもしくは制動トルクとして制御される制御トルクを該車両の駆動輪に付与することにより該車両のステアリング特性を変化させる車両の制御装置において、前記制御トルクを前記駆動輪に付与する際に、前記車両の共振周波数よりも低い値に設定される制限周波数以上の前記制御トルクを制限する周波数制限処理手段(ステップS4)と、前記旋回走行時に発生する前記車両の加速度に基づいて前記制限周波数を補正して更新する制限周波数補正手段(ステップS1,S2,S6)とを設けた。
(もっと読む)
車両挙動制御装置
【課題】旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させること。
【解決手段】実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪WFRに発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪WFRの属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、制御対象輪WFRに前記制動力を発生させる車両挙動制御装置であって、旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における偏差に応じた制動力を次の制御対象輪WFLに対して発生させる前に、次の制御対象輪WFLの属する今現在は非液圧制御対象の液圧系統のマスタカット弁42を閉弁させると共に、次の制御対象輪WFRに対してブレーキ液圧の予圧を付与すること。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び車両運動制御の両方について実行の要否を判定し優先順位の高い方の制御を選択する必要性や頻度を低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の前後力を制御することにより車両の旋回運動を安定化させる車両運動制御とを行う車両の走行制御装置。旋回補助制御の許可車速域は車両運動制御の許可車速域よりも低く設定されている。特に旋回補助制御の許可車速域の下限値は車両運動制御の許可車速域の下限値Vvscよりも低い。或いは旋回補助制御の許可車速域の上限値Vtaはオーバーステア抑制制御の許可車速域の下限値Vspよりも高いが、旋回補助制御の許可車速域の下限値はオーバーステア抑制制御の許可車速域の下限値Vspよりも低い。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両用ブレーキ制御装置
【課題】摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行うとともにABS制御を実行する車両用ブレーキ制御装置において、ABS制御実行中においてABS制御に悪影響を与えることなくエネルギー効率を高めることができるものの提供。
【解決手段】この車両用ブレーキ装置は、前輪側の制動力を、摩擦制動力である液圧制動力(前輪側VB液圧分Fvbf+リニア弁差圧分Fval)と、回生制動力Fregとにより制御し、後輪側の制動力を、液圧制動力(後輪側VB液圧分Fvbr)のみにより制御することで回生協調ブレーキ制御を実行する。そして、この装置は、ABS制御実行中において、限界回生制動力Freglimitを、回生制動対象車輪である前2輪に働いた場合に前2輪にロックが発生しない範囲内の制動力の最大値に設定し、回生制動力Fregを同限界回生制動力Freglimitを超えないように調整する。
(もっと読む)
1 - 20 / 123
[ Back to top ]