
Fターム[3D246HA51]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 切換スイッチ、選択スイッチ (189)
Fターム[3D246HA51]に分類される特許
61 - 80 / 189
自動制動制御用ECU、車型学習方法および車両
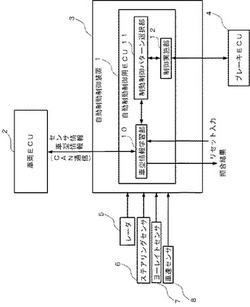
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
車群走行制御装置

【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
航空機用非対称電気制動機構
【課題】航空機用電気制動機構における正常系システム及び緊急系システムの共通モード障害リスクを軽減すること。
【解決手段】本願発明は,いくつかの電気機械制動アクチュエータ(EBA)を備え,正常モードにおいて,制動指令に応答して制動設定値を生成するための制動制御ユニットと,複数の電気機械アクチュエータ制御器(EMAC)であって,それぞれ交流電源によって給電され,制動設定値に応答してEBAに電力を供給する少なくとも一つのインバータをそれぞれ含む電気機械アクチュエータ制御器と,直流電源だけから給電される少なくとも一つの緊急制動電源及び制御ユニット(EBPCU)であって,制動指令に応答してEBAのいくつかに電力を供給する少なくとも一つのインバータを含む緊急制動電源及び制御ユニットと,機構に電力が流れることを防止すると共に,アクチュエータに対してEMAC又はEBPCUが供給する電力を伝えるための保護手段と,を備える。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両制御装置
【課題】衝突安全制御による車両の動作を体験できる車両制御装置を提供すること。
【解決手段】車両制御装置20は、自車両と障害物との間の距離および相対速度に基づいて自車両が障害物と衝突する可能性があるか否かを判断し、衝突の可能性がある場合には自車両の走行速度を減速させる衝突安全制御を行う車両制御装置20であって、衝突を回避できるか否かを判断し、衝突回避不可と判断した場合に衝突安全制御を行う通常走行処理手段251と、予め設定された体験走行実行条件を満たすか否かを判断し、体験走行実行条件を満たす場合には、通常走行処理手段251に代えて、衝突安全制御を行う体験走行処理手段252を有する。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
車両のブレーキ制御装置
【課題】勾配センサ等を設けたり、複雑な演算を要することなく、坂道発進補助装置の制動力解除を適切なタイミングで行うことのできる車両のブレーキ制御装置を提供すること。
【解決手段】坂道発進補助機能により制動力が保持されている状態から発進する際に、車軸トルクが、発進段に応じて設定された車軸トルク規定値以上となったときに、坂道発進補助機能を解除する(S4、6)。
(もっと読む)
車両用ブレーキ制御装置
【課題】 車両が加減速の頻度が高くなる走行状態であるときに、減速後における揺り戻し挙動を抑制する車両用ブレーキ制御装置を提供すること。
【解決手段】 電子制御ユニット34は、スポーツモードスイッチ33がスポーツモードに切り替えられており、前後加速度センサ31によって検出された減速度Gが予め設定された所定減速度Go以上であるとき、ブレーキ液圧制御部20の作動を制御する。具体的に、ユニット34は、マスタシリンダ液圧センサ32によって検出されたマスタシリンダ液圧Pmの液圧変化量ΔPmが所定の短い時間間隔で負の値であるときに、ブレーキユニット11〜14におけるブレーキ液圧が予め設定された減圧量ΔPにより減圧するように目標ブレーキ液圧Ptを設定する。そして、ユニット34は、駆動回路35を介して、ブレーキ液圧制御部20の作動を制御し、ブレーキユニット11〜14におけるブレーキ液圧を緩やかに減圧させる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、閉弁用マップの出力電流値から開弁用マップの出力電流値に変更した後、閉弁用マップの出力電流値と開弁用マップの出力電流値との間の出力電流値に変更して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、開弁用マップMP1の出力電流値と閉弁用マップMP2の出力電流値を交互に選択して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
車両用停車制御装置
【課題】車両停車時に停車の要否を判定し、確実に停車を維持できる停車維持制御を行うことが可能な車両用停車制御装置を提供する。
【解決手段】停車維持制御中に、運転席シートベルトセンサにより、運転者がシートベルトを外していないか、また、給油口センサにより、給油口が開かれていないか、ドア開閉センサにより、各ドアやトランク、フード、ラゲージ等が開かれていないかを判定する(発進可否判定=ステップS11)。これらの条件のいずれかが発生し、発進すべきでない状態にあると判定した場合で、かつ、ドライバによるブレーキ操作が行われていない場合(ステップS13)には、PKB(パーキングブレーキ)装置に指示してPKBを作動させる(ステップS15)。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
車両用停車制御装置
【課題】 車両停車時に停車の要否を判定し、確実に停車を維持できる停車維持制御を行うことが可能な車両用停車制御装置を提供する。
【解決手段】 自動的に停車状態を維持している場合に、ドライバにより停車維持終了操作が行われた場合(ステップS31)、その際にドライバによってブレーキ操作が行われていない限り(ステップS33)、停車維持制御を解除してオフにする(ステップS35)制御を実行しないことで、解除時においても停車状態を確実に維持する。
(もっと読む)
車両制御装置
【課題】ドライバに違和感を与えることなくドライバのペダル操作負担を軽減可能な車両制御装置を提供する。
【解決手段】ドライバのアクセル操作状態を検出するアクセル操作状態検出部と、自車両の速度を減速させる減速装置と、自車両の速度を算出する車体速算出部と、検出されたアクセル操作状態と算出された車体速に基づいて目標車体速を設定し、目標車体速となるように制御する速度制御部を有するコントロールユニットと、を備えた。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
作業車両の制御装置
【課題】作業を容易に開始することができる作業車両の制御装置を提供する。
【解決手段】走行ペダルが非操作(PT≦PT1)で回転数Nが所定値N1以下の状態が所定時間継続されると、ブレーキロックと同時にラムシリンダをロックするようにしたので、煩雑なスイッチ操作をすることなくラムシリンダをロックすることができ、作業を容易に開始することができる。
(もっと読む)
61 - 80 / 189
[ Back to top ]