
Fターム[3D246HA51]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 切換スイッチ、選択スイッチ (189)
Fターム[3D246HA51]に分類される特許
81 - 100 / 189
車両制御装置
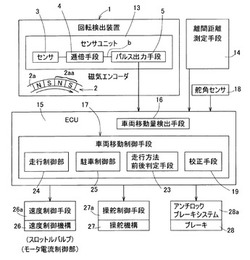
【課題】 車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供する。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
(もっと読む)
車両制御装置

【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
車両運動制御装置
【課題】ロール角がロール限界値に達する可能性をより低くでき、横転抑制効果をより高くできるようにする。
【解決手段】実スリップ率Saの減少に対する横加速度Gyの増加率が大きい場合に、減圧モード時に設定される減圧デューティDDutyが制限されるようにする。これにより、W/C圧の減圧に伴う制動力の増加が抑制され、実スリップ率Saの減少が抑制されることになり、実スリップ率Saの低下に起因する横加速度Gyの増加、引いてはロール角の増加を抑制できる。したがって、ロール角がロール限界値を超えることを防止でき、横転抑制を効果的に行うことが可能となる。
(もっと読む)
駐車ブレーキ装置
【課題】過大な張力を発生することを防止することができる駐車ブレーキ装置を提供すること。
【解決手段】本発明による駐車ブレーキ装置1は、サービスブレーキ装置の含むパッドにケーブルの張力Fに基づいた推力Fprを付与する駐車ブレーキ装置1であって、サービスブレーキ装置の制御油圧Pを検出する制御油圧検出手段3と、張力Fの目標張力F1を制御油圧Pに基づいて決定する目標張力決定手段2aと、を含むことを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
車両用ブレーキ装置
【課題】電気作動式駐車ブレーキ駆動手段を備える車両用ブレーキ装置において、電気作動式駐車ブレーキ駆動手段を作動させるのに運転者の煩わしい操作を不要としつつ、その作動頻度を低減し、ノイズの発生を抑えるとともに耐久性の向上に寄与する。
【解決手段】運転者のブレーキ操作に対応して液圧発生手段Mから液圧作動式の車輪ブレーキ2B,2Dに出力されるブレーキ液圧を検出するブレーキ液圧センサ15A,15Bを含み、コントローラCは、ブレーキ液圧センサ15A,15Bで検出されるブレーキ液圧が車両の停止状態で基準値を超えるのに応じて電気作動式駐車ブレーキ駆動手段24A,24Bの通電を開始し、且つこの通電開始時の電気作動式駐車ブレーキ駆動手段24A,24Bの作動量の時間変化率が、その作動量が目標作動量に達するときの作動量の時間変化率よりも小さくなるように、該電気作動式駐車ブレーキ駆動手段の通電を制御する。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】前後輪の駆動力の配分量を理想的な駆動力の配分量に一致させつつ、モータ内の作動油の温度を上昇させて燃費の悪化を改善する。
【解決手段】ECUは、アクセルペダルの踏み込み量がゼロである場合に(S100にてYES)、実モータ温度と理想モータ温度との偏差を算出するステップ(S102)と、モータの必要発熱量を推定するステップ(S104)と、モータ発熱を要する場合に(S106にてYES)、モータの出力電力あるいは回生電力を算出するステップ(S108)と、オルタネータにおける発電電力あるいは吸収電力を算出するステップ(S110)と、モータおよびオルタネータを制御するステップ(S112)と、駆動力の配分量の目標値との偏差を算出するステップ(S114)と、制動装置を制御するステップ(S116)と、エンジンを制御するステップ(S118)とを含む、プログラムを実行する。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
車両用変速機の制御装置
【課題】オートパーキング機能を持つ車両において、専用の解除スイッチを設けることなく、駐車状態を解除し、ニュートラルに設定できるようにする。
【解決手段】
オートパーキング機能を制御するための手段を具備する一方で、原動機の始動、停止を制御するために運転者によって操作されるスイッチ(32)と、変速機(10)の変速段を選択するために運転者によって操作される変速指示操作子(30)とを利用し、該変速指示操作子(30)でニュートラルが選択された状態で前記スイッチ(32)からの信号がOFFを示していることを条件として、前記変速機(10)の変速段をニュートラルに保持したまま原動機を停止させるよう制御し、ニュートラルに保持したまま原動機停止させた場合はオートパーキング制御は行わないようする。
(もっと読む)
追従走行制御装置
【課題】先行車に追従して自車を減速停止する際に、車間距離が長くならず、急減速によってドライバに不快感を与えることもない理想的な減速停止を実現する。
【解決手段】先行車の減速停止に追従して自車1が停止するときに、制御ECU7により、最初は、第1減速演算手段が演算する減速度に基づき自車1を十分に減速し、つぎに、第1減速演算手段の減速度と第2減速演算手段の減速度とを重み付け加算した第3減速演算手段の減速度に基づく減速制御に移行し、自車1の減速度を少しずつ小さくして自車1が停止したときの車間距離が第1減速演算手段の減速度で停止する場合より短くし、先行車に追従して自車1が減速停止する際の車間距離が長くならないようにするとともに、急減速を防止してドライバに不快感を与えないようにする。
(もっと読む)
自動二輪車のブレーキ装置
【課題】連動ブレーキシステムを搭載した自動二輪車であっても、違和感のないブレーキ操作を行うことができる自動二輪車のブレーキ装置を提供する。
【解決手段】自動二輪車のブレーキ装置10は、ブレーキレバー12及びブレーキペダル14の各操作に応じて前輪側ブレーキキャリパ16及び後輪側ブレーキキャリパ18を電気的に駆動制御可能であると共に、ブレーキペダル14の操作に基づき後輪側ブレーキキャリパ18と前輪側ブレーキキャリパ16とを連動可能に構成されており、ブレーキペダル14が操作されて後輪側ブレーキキャリパ18と連動して前輪側ブレーキキャリパ16が制動力を発生している状態で、さらにブレーキレバー12が追加操作された場合に、前輪側ブレーキキャリパ16に作用させる目標液圧を、ブレーキレバー12の追加操作に対応した制動力よりも小さな制動力となるように、予め設定された所定の関数を用いて補正する。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
制動制御装置
【課題】電動パーキングブレーキの誤作動を防止しつつ安定したヒルホールド機能を確保できる制動制御装置を提供する。
【解決手段】制動制御装置を、車両の停車を判定する停車判定手段31,61と、路面の傾斜を判定する傾斜判定手段62と、路面の傾斜を前記停車判定手段よりも短時間で簡易判定する簡易傾斜判定手段32と、ドライバによるブレーキ操作を検出するブレーキ操作検出手段73と、停車判定手段による停車判定及び簡易傾斜判定手段による簡易傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出した場合に液圧式ブレーキの液圧を保持する液圧保持制御手段30と、停車判定手段による停車判定及び傾斜判定手段による傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出し又は液圧保持制御手段が液圧を保持している場合に電動パーキングブレーキを解除状態から制動状態へ移行させる電動パーキングブレーキ制御手段60とを備える構成とする。
(もっと読む)
車両挙動制御装置
【課題】ドライバが挙動制御の介入レベルを低下させた場合であっても、路面の摩擦係数が低下する可能性が高い場合には挙動制御の介入レベルを向上して車両の安定性を確保できる車両挙動制御装置を提供する。
【解決手段】車両のオーバーステア状態又はアンダーステア状態を検出する挙動検出手段と、挙動検出手段の検出結果に応じて左右輪の制駆動力差を発生させてオーバーステア状態又はアンダーステア状態を軽減する挙動制御を行う挙動制御手段と、ドライバによる操作に応じて挙動制御手段の介入レベルを変更する挙動制御モード選択手段と、車両が走行中の路面の摩擦係数低下の兆候を判定する摩擦係数低下判定手段とを備える車両挙動制御装置20を、挙動制御手段は、挙動制御モード変更手段からの入力によって挙動制御の介入レベルを低下させておりかつ摩擦係数低下判定手段が摩擦係数低下の兆候を判定した場合に、挙動制御の介入レベルを向上させる構成とする。
(もっと読む)
車両挙動制御装置
【課題】路面状況に応じて車両のヨー運動とサスペンションの減衰力の制御を行うことで、車両挙動特性と乗心地性を向上する車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両の車体と前輪および後輪との間に介装され、減衰力可変機構を備えたサスペンション装置と、前輪または該後輪の少なくとも一方における該左右輪の駆動力を調整する第1のヨー運動調整手段と、輪間での差動制限度合を調整する第2のヨー運動調整手段と、路面の状況に応じて第1及び第2のヨー運動調整手段を制御して車両のヨー運動を制御するとともに、減衰力可変機構を制御して減衰力可変機構の減衰力を調整する制御手段とを有する。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
運転支援装置
【課題】運転支援の機能を運転者が適切に利用することができる運転支援装置を提供すること。
【解決手段】本発明に係る車両の制御により運転者の運転を支援する運転支援装置は、運転支援制御中における運転者の操作介入に基づいて、運転支援制御を制限する運転支援制限手段と、運転支援制御の信頼度を検出する信頼度検出手段と、信頼度に応じて運転支援制限手段の作動条件を変更する作動条件変更手段と、を備えることを特徴とする。
(もっと読む)
動作特性モード制御装置及び動作特性モード制御方法
【課題】車両の動作特性モードを設定した際に、車両の挙動が予期しない状態となることを抑制することが可能な動作特性モード制御装置及び動作特性モード制御方法を提供する。
【解決手段】本発明では、動作特性モード設定手段は、設定した動作特性モードに応じた制御指令を複数の挙動制御手段のそれぞれに対して出力する。そして、複数の挙動制御手段のそれぞれは、動作特性モード設定手段が出力した制御指令に係る動作特性モードによる制御を実行可能な場合、該動作制御モードを設定する。そして、動作特性モード設定手段は、いずれかの挙動制御手段が設定している動作特性モードが自己が設定している動作特性モードと一致していないと判定した場合、設定している動作特性モードと異なる他の動作特性モードを新たに設定する。
(もっと読む)
81 - 100 / 189
[ Back to top ]