
Fターム[3D246HB01]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 路面状態 (664)
Fターム[3D246HB01]の下位に属するFターム
摩擦係数 (303)
路面傾斜 (285)
悪路、凹凸 (32)
部分低μ路、段差、ハイドロプレーニング (7)
Fターム[3D246HB01]に分類される特許
1 - 20 / 37
路面分析
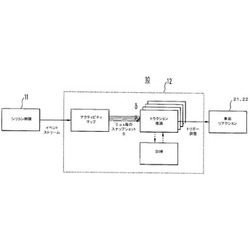
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
制動力制御装置

【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
路面状態推定方法
【課題】走行中の雪路を更に細分化して推定することのできる路面状態推定方法を提供する。
【解決手段】加速度センサー、路面温度計、及び、マイクロフォンにより、タイヤのタイヤ周方向振動、路面温度T、及び、タイヤ発生音をそれぞれ検出するとともに、タイヤの振動のデータから、踏み込み前領域R1の帯域値P11,P12,P13と、踏み込み領域R2の帯域値P21,P22,P23と、蹴り出し前領域R3の帯域値P31,P32,P33と、蹴り出し領域R4の帯域値P41,P42と、蹴り出し後領域R5の帯域値P51,P52,P53とを算出し、タイヤ発生音のデータから低周波帯域のバンドパワー値PAと高周波帯域のバンドパワー値PBとの比である音圧レベル比Q=(PA/PB)を演算し、帯域値Pijと、路面温度Tのデータと、音圧レベル比Qと、車輪速のデータとを用いて、路面状態を推定する。
(もっと読む)
車両制御装置
【課題】自動制御運転の不可能な道路で自動制御運転で運転を行うのを防止することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
(もっと読む)
車両用制御装置
【課題】ミリ波レーダが開閉バーを物体として検出し、PCSが作動することによって運転者に違和感を与えてしまうこと等を抑制できる車両用制御装置を得る。
【解決手段】ETC車載器10と路側アンテナの通信が完了したときから、車速センサ50によって検出された自車両の速度が所定速度以上になったときまで、物体判定閾値を、開閉バーを無視するように、基準値から開閉バー判定値に変更し、自車両の前方物体からの反射波のピークレベルが物体判定閾値未満の場合、前方物体をノイズと見なし、一方、ピークレベルが物体判定閾値以上である場合、前方物体を目標物体として検出し、前方物体の距離及び相対速度を算出するミリ波レーダ20と、算出された前方物体の距離及び相対速度に基づき、衝突予想時間及び衝突軽減処理閾値を算出し、衝突予想時間が衝突軽減処理閾値未満である場合、衝突軽減処理を行う衝突軽減制御部30とを設けた。
(もっと読む)
車両制御装置
【課題】ドライバに違和感を与えることなくドライバのペダル操作負担を軽減可能な車両制御装置を提供する。
【解決手段】ドライバのアクセル操作状態を検出するアクセル操作状態検出部と、自車両の速度を減速させる減速装置と、自車両の速度を算出する車体速算出部と、検出されたアクセル操作状態と算出された車体速に基づいて目標車体速を設定し、目標車体速となるように制御する速度制御部を有するコントロールユニットと、を備えた。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
運転支援システム
【課題】歩行者などに対する水跳ねが発生しないような浅い水溜りで不要な運転支援が実行されることを防止し、制御精度の向上が図られた運転支援システムを提供する。
【解決手段】路面の高度差に関する情報を取得する路面高度差取得手段11と、降雨を検出する降雨検出手段12と、降雨検出手段12が降雨を検出した場合において路面高度差取得手段11によって取得された路面の高度差が所定値以上である道路上の地点に、運転支援を行う運転支援手段13とを備える運転支援システム1とする。これにより、降雨の有無と路面の高度差とに応じて水溜りができる可能性の高い地点を判定し、この判定された地点に車両が接近する場合に運転支援を行うことが可能となる。その結果、水跳ねが発生しないような浅い水溜りに接近する場合における運転支援の実行を防止することができる。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】カーブの勾配に応じて変化する車両の挙動やカーブの状況を考慮した適切な運転支援を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、車両の進行方向に存在するカーブの勾配及び旋回方向を特定し、当該特定した勾配及び旋回方向に基づき、カーブを走行する車両が当該カーブの走行車線から逸脱する可能性の高い逸脱方向を特定する逸脱方向特定部53aと、逸脱方向特定部53aが特定した逸脱方向におけるカーブの状況を特定し、当該特定した状況に基づき支援内容を決定し、当該決定した内容の支援を行う支援部53bとを備える。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
運転制御装置
【課題】制動力の調整のみによって左右の駆動輪間の前後力に差を与えて車両の旋回性能を制御する場合に、制動による減速感を低減すること。
【解決手段】運転制御装置20は、走行軌跡設定部21と、制御条件判定部22と、操作感度変更部23とを備える。走行軌跡設定部21は、車両が将来走行する将来走行軌跡を設定する。制御条件判定部22は、走行軌跡設定部21が設定した将来走行軌跡から、US(アンダーステア)抑制制御の介入が予測されるか否かを判定する。操作感度変更部23は、制御条件判定部22が、US抑制制御の介入が予測されると判定した場合、アクセルペダルの操作感度を、US抑制制御の介入がない場合よりも、車両の内燃機関の出力が増加しやすくなるように変更する。
(もっと読む)
ブレーキ制御装置
【課題】電源電圧が低下した場合においても制動制御について良好な応答性を維持できるブレーキ制御装置を提供する。
【解決手段】ある態様のブレーキ制御装置は、バッテリからの電力供給を受けて駆動し、その動力によりアキュムレータへ作動液を供給して蓄圧を実行するオイルポンプと、バッテリの出力電圧を検出する電圧検出センサと、アキュムレータ圧Paccを検出するアキュムレータ圧センサと、アキュムレータ圧Paccが蓄圧開始液圧以下となったときに、オイルポンプの駆動を開始してアキュムレータへの蓄圧を開始する一方、アキュムレータ圧Paccが蓄圧開始液圧よりも高い蓄圧終了液圧以上となったときに、オイルポンプの駆動を停止してアキュムレータへの蓄圧を終了し、バッテリの出力電圧が許容基準値Vref以下となったときには蓄圧終了液圧を所定量嵩上げ設定するブレーキECUと、を備える。
(もっと読む)
減速度比推定装置を有する列車制御装置
【課題】列車の減速動作中に実際の車両特性を計測し、この実際の車両特性に基づいて減速動作を制御し、列車を停止目標位置に精度よく停止させる。
【解決手段】車両特性保持手段4は、ブレーキ指令値に対応する標準減速度を車両特性データとして保持する。減速度比推定手段7は減速度算出手段6にて算出された減速度と、車両特性保持手段4にて保持された標準減速度との比を示す減速度比を算出する。制御指令算出手段8は、前記減速度比算出手段にて算出された減速度比を用いて、前記車両特性データを更新し、列車速度及び位置と前記更新された車両特性データに基づいてブレーキ装置へのブレーキノッチ指令値を算出する。
(もっと読む)
車両用駆動力制御装置
【課題】後輪駆動車両の加速旋回時における走行安定性を確保する車両用駆動力制御装置を提供する。
【解決手段】LM=0,LCP=0の交点付近に存在する更新されたスリップ率σL_REF,σR_REFから制限駆動力FXL_LIM,FXR_LIMを求めて(S12)、S13に移行し、S4で求めた目標駆動力FREFと制限駆動力FXL_LIM,FXR_LIMとを用いて比較し、小さい方を最終目標駆動力FREFとして設定し、S14に移行する。左右後輪の安定限界となる後輪局所CrREFから算出された制限駆動力FXL_LIM,FXR_LIMを超えないよう駆動力を制限するため、後輪駆動車両の加速旋回時、乗員の要求する駆動力を確保しつつ、オーバステアを防止することができる。
(もっと読む)
制動力制御装置
【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
鉄道車両
【課題】軸箱支持装置の前後剛性を低くしながらも直線の高速走行安定性を良くした鉄道車両を提供すること。
【解決手段】左右の踏面ブレーキユニット20と、各ブレーキシリンダ21への圧縮エアの給排気を制御するブレーキコントローラ1とを有するものであり、ブレーキシリンダ21が、輪軸7を回転支持する軸箱6に対して車体後方側から支持荷重Fを作用させるものであって、ブレーキコントローラ1が、直線走行時には、輪軸7と台車枠2,3との間で車体前後方向に弾性力が作用する弾性部材に関し、その弾性変形内で軸箱6を後方から支持荷重Fで支えるようにブレーキシリンダ21に圧縮エアを供給し、曲線走行時には、弾性部材の弾性変形に伴う軸箱6の移動を自由にするようにブレーキシリンダ21から圧縮エアを排気するようにした鉄道車両。
(もっと読む)
1 - 20 / 37
[ Back to top ]