
Fターム[3D246HB02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 路面状態 (664) | 摩擦係数 (303)
Fターム[3D246HB02]の下位に属するFターム
グリップ度、路面μ利用率、摩擦円 (22)
μ勾配、μ−S線図 (7)
前後方向(ジャンプμ) (6)
左右方向(スプリットμ) (24)
Fターム[3D246HB02]に分類される特許
1 - 20 / 244
車両用ブレーキ液圧制御装置
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
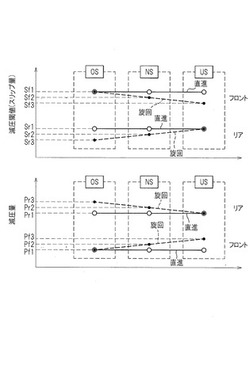
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置

【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、高摩擦係数の路面であることを精度よく判定して許容差圧を充分に大きく設定可能とする。
【解決手段】車両の推定車体減速度を推定車体減速度算出手段26が算出し、許容差圧設定手段27が、路面摩擦係数に対応した許容差圧を推定車体減速度算出手段26が算出した推定車体減速度に基づいて設定する。
(もっと読む)
ブレーキ装置
【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面の摩擦係数に安定して対応した許容差圧が得られるようにする。
【解決手段】制御対象の車輪と同軸上にある他の車輪の車輪ブレーキのアンチロックブレーキ制御に伴う減圧開始時の液圧であるロック液圧をロック液圧取得手段29が取得し、許容差圧設定手段27は、少なくともロック液圧取得手段29で得たロック液圧に基づいて路面摩擦係数に対応した許容差圧を設定する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面状態に応じて同軸上の左右の前輪および後輪用の車輪ブレーキのブレーキ液圧を独立に制御可能とする。
【解決手段】左右の車輪の接地路面の摩擦係数が大きく異なるスプリット路であるか否かをスプリット路判定手段31で判定し、路面の摩擦係数が所定摩擦係数よりも低い低摩擦係数の路面であるか否かを低摩擦係数路判定手段32で判定し、スプリット路判定手段31の判定結果がスプリット路である状態ならびに低摩擦係数路判定手段32の判定結果が低摩擦係数路である状態のいずれかのときに、路面摩擦係数に対応した許容差圧の適用を禁止する。
(もっと読む)
車両の制御装置
【課題】旋回走行時の車両挙動を安定させるための駆動力制御および制動力制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】操舵角および横加速度に基づいて駆動力もしくは制動力を補正して変化させることにより、旋回走行時の車両挙動を安定させる制駆動力制御を実行可能な車両の制御装置において、ステアリングの切り込み操作および戻し操作における操作時間および/または操作速度を検出するステアリング操作検出手段(ステップS105,S106,S107,S108)と、前記切り込み操作および前記戻し操作が行われる際に、前記操作時間もしくは前記操作速度に基づいて、前記補正により前記駆動力もしくは前記制動力を変化させる際の変化速度を設定する制駆動力設定手段(ステップS110,S111)とを設けた。
(もっと読む)
車両のエンジン自動停止制御装置
【課題】 走行中においても適切なエンジン停止及び再始動を達成可能な車両のエンジン自動停止制御装置を提供すること。
【解決手段】 本発明の車両のエンジン自動停止制御装置では、走行中に運転者がブレーキペダルを所定の閾値以上操作したときにエンジンを停止するにあたり路面摩擦係数が小さいほど所定の閾値を大きくすることとした。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
路面状態推定方法、及び路面状態推定装置
【課題】バネ下前後加速度と車輪速のデータとを用いて、走行中の路面の状態を精度よく推定する方法とその装置を提供する。
【解決手段】ナックル21に取付けられた加速度センサー11によりバネ下前後加速度を検出するとともに車輪速を検出して車輪速の変化量を算出した後、車輪速の変化量の変動幅とバネ下前後加速度の変動幅とを算出し、車輪速の変化量の変動幅とバネ下前後加速度の変動幅との関係から路面が凹凸のある路面であるか否かを判定し、凹凸のある路面である場合には、バネ下前後加速度を周波数分析して得られた周波数スペクトルの200Hz〜230Hz帯域内におけるピーク周波数を抽出し、このピーク周波数と、車輪速と、予め求めておいたピーク周波数と車輪速との関係を示す周波数判定式とを用いて凹凸のある路面が滑り易い路面であるか否かを推定するようにした。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段2と、自車両の位置を取得する自車位置取得手段3と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段4と、を有し、車両運動制御演算手段4は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算し、前記前後加速度指令値は、自車両前方のカーブ走行時に発生するであろう最大横加速度推定値、自車両前方の道路勾配、ドライバのペダル操作、旋回方向のうちの少なくともいずれか一つに基づいて変化する。
(もっと読む)
車両挙動制御装置
【課題】ブレーキによるヨーモーメント制御のハンチングの発生を抑制し、滑らかな車両挙動で、制御精度を向上する。
【解決手段】車両の運転状態に基づいて車両の目標ヨーレートγtを算出し、車体すべり角速度に基づいて車体すべり角速度感応ゲインGdβを設定し、ヨーレート、γt、Gdβに基づいて目標ヨーモーメントMztを算出し、旋回内側前後輪に付加する目標ブレーキ液圧算出する。ここで、車体すべり角速度感応ゲインGdβは、目標ヨーモーメントMztの値が、タイヤのグリップ限界を超えるヨーレートを発生させる値とならないように、車体すべり角速度の絶対値に応じて目標ヨーモーメントMztを減少補正する補正ゲインとなっているが、この減少補正の際、目標ヨーモーメントMztを0としてしまわないように、0よりも大きな値を下限値として減少補正する。
(もっと読む)
牽引車両の制御装置
【課題】4輪駆動車の前後軸間の駆動力配分制御と牽引走行における揺動抑止制御とを適切に協調して行い、最適な揺動抑止効果を安定して得る。
【解決手段】牽引車両100の走行状態に基づいて該牽引車両100に発生する揺動状態を検出し、検出した牽引車両100の揺動状態に基づいて該揺動を抑制する制御の実行を判定し、揺動を抑制する制御を実行すると判定した場合にブレーキ制御部32に信号を出力して制動力により牽引車両にヨーモーメントを発生させて揺動を抑制する等の制御を実行させると共に、この揺動を抑制する制御を実行する場合に前後駆動力配分制御部31によるトランスファクラッチトルクTlsdを前後軸間の駆動力配分を前軸側に多く移動補正して出力させる。
(もっと読む)
車両の運転支援装置
【課題】制動のみによる障害物回避も精度良く確実に行うことができ、制動力に加えてドライバが操舵により旋回回避する際においても、ドライバが意図する十分な旋回運動により障害物を回避することができる信頼性の高い衝突防止制御を行う。
【解決手段】走行制御ユニットは、自車両と障害物との衝突可能性を判定し、自車両と障害物との衝突可能性が高いと判定された場合、障害物との衝突を防止する制動力を予め設定し、自動ブレーキ制御装置に信号出力して減速度を発生させるが、この際、ドライバの操舵を検出した場合には、発生させる制動力を低下補正する。
(もっと読む)
タイヤ接地状態推定装置
【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両のABS制御装置
【課題】車両が凍結路等の低摩擦路面を走行中にABSが作動したときの車両の減速度不足感に伴う運転者の違和感を解消することができる車両のABS制御装置を提供すること。
【解決手段】Gセンサ4や車輪速センサ5の検出値に基づいて各車輪の最適回転速度を算出するABSコントローラ8と、該ABSコントローラ8からの制御信号によって電磁弁9を開閉制御してスリップ率が制御目標値となるようブレーキ圧を制御するABSアクチュエータ10を含んで構成される車両のABS制御装置において、外気温と車両速度が共に設定値以下である場合には制御目標スリップ率を常温・高速時の制御目標スリップ率に対してロック側に変更する。
(もっと読む)
1 - 20 / 244
[ Back to top ]