
Fターム[3D246HC02]の内容
ブレーキシステム(制動力調整) (55,256) | 推定ロジック (525) | モデルによるもの (122)
Fターム[3D246HC02]の下位に属するFターム
車両モデルによるもの (65)
タイヤモデルによるもの (26)
Fターム[3D246HC02]に分類される特許
1 - 20 / 31
走行制御装置
【課題】 ドライバに与える違和感を軽減できる走行制御装置を提供する。
【解決手段】 自車走行路前方の車幅方向と高さ方向による走行路および障害物を検出し、走行路前方の立体空間を検出する立体空間検出部11と、検出された立体空間に対し、自車の障害物に対する衝突リスクの高さを推定する衝突リスク推定部12と、推定された衝突リスクの高さに応じて、衝突リスクが高い部分から距離を取るように自車の目標経路を演算する目標経路演算部13と、演算された推奨経路に基づいて運転支援を行う運転支援部14と、を備えた。
(もっと読む)
車両用制御装置

【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
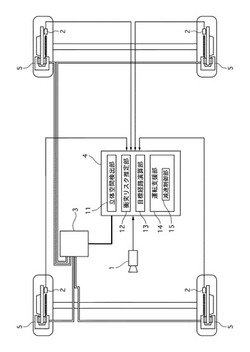
車両制動制御装置
【課題】運転者の体格差によらず同じ制動感が体感される車両制動制御装置を提供する。
【解決手段】車両2を目標の減速度で減速させるよう制動する制動手段3と、車両2の運転者4の頭部位置を検出する頭部位置検出センサ5と、車両2の減速度と運転者4の頭部位置と頭部に生じる減速度との関係があらかじめ設定されており、この関係に頭部位置検出センサ5で検出された頭部位置を適用し、頭部に生じる減速度があらかじめ設定された適正値となるよう、制動手段3に与える目標の減速度を設定する目標減速度設定部6とを備える。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
圧力モデル及び優先順位付けデバイスを有するブレーキシステム
本発明は、ブレーキブースタを備えるブレーキシステムであって、ブレーキブースタのピストン−シリンダシステム(14、HZ、THZ)が電気モータによって、特にトランスミッション手段によって機械的または液圧的に駆動され、ピストン−シリンダシステム(14、HZ、THZ)の少なくとも1つの作用チャンバが液圧ラインを介して少なくとも2つのホイールブレーキに接続され、各ホイールブレーキが2/2分配制御弁(17a、17b、17c、17d)と関連付けられ、ホイールブレーキ(18a、18b、18c、18d)とピストン−シリンダシステム(14、HZ)との間の液圧接続ラインが2/2分配制御弁(17a、17b、17c、17d)によって選択的に切断され或いは一緒に閉塞可能であり、それにより、ホイールブレーキ(18a、18b、18c、18d)内で圧力を多重方法で連続して及び/または同時に調整でき、電気モータ及び制御弁(17a、17b、17c、17d)が調整デバイスによって作動されるブレーキシステムにおいて、調整デバイスは、圧力モデル(103)によってホイールブレーキ内のそれぞれの圧力(pR(t))を計算し、計算された圧力値(pR(t))を少なくとも1つのABS/ESP調製器(104)及び圧力調整デバイス(106)へ送り、圧力調整デバイス(106)が少なくとも2/2分配制御弁(17a、17b、17c、17d)と電気モータとを作動させ、優先順位付けデバイス(105)が、ABS/ESP調整器(104)により送られたデータに基づいてホイール選択を行って、それを圧力調整デバイス(106)へ送るブレーキシステムに関する。 (もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
電動車両の制動制御装置
【課題】電気的制動手段と油圧制動手段とを備え、アンチロック制御を行う際に、静粛性を向上することが可能な電動車両の制動制御装置を提供すること。
【解決手段】目標制動トルクを駆動系の共振周波数を含まない第1周波数成分と、駆動系の共振周波数を含む第2周波数成分とに分解し、第1周波数成分により電気的な制動トルクを与える電動モータを制御し、第2周波数成分により車輪に摩擦制動トルクを与える摩擦制動装置を作動させることとした。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
ABS制御システム異常診断装置
【課題】本発明は、ABS制御システム異常診断装置に関し、ABS制御システムの異常を高精度に判定することが可能なABS制御システム異常診断装置を提供することを目的とする。
【解決手段】システム同定部10は、ABS制御時における制御入力(クランク軸の軸トルク)から制御出力(車輪の回転速度)までの車両挙動の動特性を記述する同定式を、ブレーキ圧の上昇状態、下降状態及び保持状態という合計3離散状態で切り替わるPWARXモデルとして同定を行う。現在状態推定部12及び車輪速推定部14は、同定したPWARXモデルを用いて現在状態及び車輪速を推定する。距離演算部16、帰属確率演算部18は、PWARXモデルのサブモデルを用いて距離、帰属確率をそれぞれ演算する。異常判定部20は、これらの推定値や演算値に基づいて、ABS制御システムの異常判定を行う。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
停止制御装置
【課題】電気ブレーキと空気ブレーキとの切り替わったタイミングを正確に推定し、駅定点停止制御において使用すべきブレーキモデルを誤判断無く適切に選択して精度のよい駅定点停止制御を行う停止制御装置を提供する。
【解決手段】ブレーキモデル選択情報に基づき列車を目標とする地点に停車させるための停止制御に必要なブレーキノッチ指令を生成して出力する駅定点停止ノッチ制御部6とを備え、ブレーキモデル判断部20は、列車の速度を検出する列車走行速度検出部1と、速度を微分することにより減速度を算出する減速度演算部2と、減速度の波形を微分することによりジャーク波形を算出するジャーク演算部3aと、ジャーク波形に基づき電気ブレーキと空気ブレーキとの切替が発生したか否かを判断する電気ブレーキ/空気ブレーキ切替発生判断部4と、切替の判断結果に基づきブレーキモデルを選択するブレーキモデル選択部5とを有する。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
電動ブレーキ
【課題】ブレーキディスクに対するピストン押付力を的確に制御できる電動ブレーキを提供する。
【解決手段】電動モータの回転作動によって非回転ブレーキディスクに対して押付けられるピストンを備え、制御指令値uに基づいて電動モータを駆動するコントローラ20は、制御指令値uと制御出力yに応じて算出される外乱dの推定量eと制御ゲインgに応じて外乱フィードバック量Lを設定する外乱応答補償部41を備え、制御ゲインgは制御指令値uに対する目標指令値rの比率u/rに応じて設定される構成とした。
(もっと読む)
車両用歩行者検出装置
【課題】歩行者の立ち止まりからの動き出しについて精度良く判定できる車両用歩行者検出装置を提供する。
【解決手段】歩行者の挙動(走行路横断行動)に関し、歩行者の意思が反映された膝部位置移動速度及Vkt及び肩部位置移動速度Vstを用いて、歩行者動き出し条件式を、膝部及び肩部の運動エネルギの形(Vst/α)2+(Vkt/α)2>1 (但し、Vst>0且つVkt>0、α:正規化係数)とすることにより、その運動エネルギにおける速度の2乗値に基づき、歩行者8の挙動予測に及ぼす膝部位置移動速度Vkt及び肩部位置移動速度Vstの反映度を高め、判定精度を高める。
(もっと読む)
ブレーキ制御装置
【課題】液圧回路とホイールシリンダとをつなぐ接続系に弾性部材要素が含まれていても、液圧制御における良好な応答性を確保可能なブレーキ制御技術を提供する。
【解決手段】ある態様のブレーキ制御装置においては、ホイールシリンダ圧のフィードバック制御に際して接続通路内の液圧剛性の変化が考慮される。ブレーキECUは、設定対象となる制御ゲインがそれぞれ異なるように構成された複数の制御マップを保持し、リニア制御弁を通過する作動液の流量に応じて対応する制御マップを参照し、フィードバック制御の制御ゲインを設定する。
(もっと読む)
1 - 20 / 31
[ Back to top ]