
Fターム[3E003DA07]の内容
Fターム[3E003DA07]に分類される特許
1 - 20 / 25
梱包装置および梱包方法
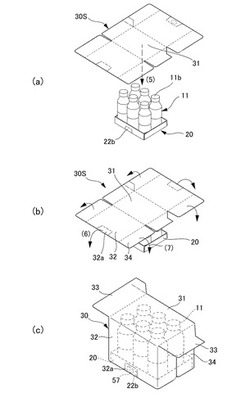
【課題】 梱包の自動化を図ることができ、しかも陳列用のトレーとしての美粧性を向上させることができる梱包装置および梱包方法を提供する。
【解決手段】 上方に開口した箱状のトレー20と、トレー20に上から被さる蓋30とからなる梱包体により、商品11を梱包する梱包方法であって、トレー用シートを折り畳んでトレー20を成形するトレー成形工程と、成形されたトレー20の中に商品11を載せる商品載置工程と、載置された商品11の上に蓋用シート30Sを載せる蓋用シート載置工程と、載置された蓋用シート30Sを、商品11を包むように折り畳んで商品11およびトレー20に被せる共に、トレー20の側部外面と蓋30の側部内面とを接着する蓋被着工程と、を含む。
(もっと読む)
ヘッダ付連包袋の自動箱詰め方法及び装置

【課題】ヘッダ付連包袋を半分の長さに折り畳み、袋の表面を上にして箱詰めする作業を自動化するのに適した折り畳み方法、とそれを実現する装置を提供する。
【解決手段】袋搬送ベルトにより袋の裏面14を上にして搬送されてきたヘッダ付4連包袋を、二番目の袋3と三番目の袋4をバキュームボックス20の袋吸着孔に吸着固定し、折り返し爪21aを上方へ旋回させ、ヘッダ1及び一番目の袋を一番目の袋2と二番目の袋3との間で、上方へ折り返す。次に、折り返し爪21bを上方へ旋回させ、四番目の袋5を三番目の袋4と四番目の袋5との間で、上方へ折り返す。これにより、袋の表面を上にして折り畳まれたヘッダ付連包袋60が完成する。
(もっと読む)
ベルト袋詰め装置
【課題】ベルトを袋詰めする作業の自動化が図れ、且つベルトを袋詰めする作業をより迅速に行うことができるベルト袋詰め装置を提供する。
【解決手段】ベルト用搬送機構4は、ベルト2を待機位置P5に搬送する。ケース5は、包装用袋3へのベルト2の挿入を案内するように構成されており、待機位置P5においてベルト2を収容している。袋供給機構6は、包装用袋3を挿入位置P2に供給する。ベルト挿入機構8は、挿入位置P2に配置された包装用袋3内へケース5とともにベルト2を挿入し、ケース5は包装用袋3から取り出す。袋シーリング機構9は、包装用袋3の開口部3aを加熱溶着して密閉する。
(もっと読む)
選果システム
【課題】青果物の選果作業に携わる作業者の人数を減らすことができる選果システムの提供を目的とする。
【解決手段】青果物6が載せられたトレイ8を待機位置P1まで搬送するトレイ搬送装置53と、包装箱9を待受位置P2まで搬送する箱搬送装置71と、待機位置P1にあるトレイ8を待受位置P2まで移送する箱詰装置72と、制御装置80と、を備え、制御装置80は、トレイ搬送装置53によってトレイ8を待機位置P1まで搬送し、箱搬送装置71によって待受位置P2とトレイ8が詰められる第一の箱詰位置S1、第二の箱詰位置S2とが一致するように包装箱9を待受位置P2まで移送した後に、箱詰装置72によってトレイ8を待受位置P2に移送するように制御する。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
ロボット、加工システム、及び加工品の製造方法
【課題】作業を省人化することが可能なロボット、加工システム、及び加工品の製造方法を提供する。
【解決手段】加工システム10は、物品を供給する物品供給部31と、被加工物を搬送する第1の搬送部22と、第1の搬送部22の下流側に設けられ、第1の搬送部22によって搬送された被加工物が載せられる作業台24と、予め教示された作業動作に従って、作業台24の上に載せられた被加工物に物品を用いた作業を施すロボット20と、作業台24の下流側に設けられ、ロボット20により作業が施された被加工物を搬送する第2の搬送部26とを備える。
(もっと読む)
多色化粧料の製造方法
【課題】打型物を崩すことなく化粧皿への移し替えを可能にして、多色化粧料の生産ラインの自動化を図る。
【解決手段】移載機4は、移動始点θin,Hinで打型物を保持し、移動始点θin,Hinから移動終点θout,Houtに打型物を移動させ、移動終点θout,Houtで打型物を解放するという動作条件にしたがって動作する。これによって、搬送位置Cに存在する複数の打型物は、化粧皿9内における所定の収容位置に移動する。
(もっと読む)
遊技盤の梱包ライン
【課題】緩衝材で囲繞した遊技盤を効率的に包装箱へ収納可能な遊技盤の梱包ラインを提供する。
【解決手段】上方が開口する包装箱11を収納待機位置P2に搬送する箱搬送コンベヤ12の上方に、遊技盤13を収納待機位置P2に臨む包装箱11の開口上方の箱収納位置P3に搬送する可動コンベヤ29が配設される。可動コンベヤ29は、搬送位置と下降位置および退避位置の間を移動し得る。箱収納位置P3に搬送した遊技盤13の下面を支持可能な支持部材36,36は、遊技盤下面の支持を解除する解除位置に移動し得る。可動コンベヤ29から支持部材36,36に受け渡された遊技盤13に緩衝材を配設した後、支持部材36,36を解除位置に移動すると共に可動コンベヤ29を退避位置に移動することで、収納待機位置P2に位置する包装箱11に遊技盤13を収納することができる。
(もっと読む)
チューブの箱詰め装置、箱詰め方法及びチューブの箱詰め装置用作業ハンド
【課題】ロボット等でチューブの箱詰め動作を自動化するにあたり、不用意なチューブの抜き出しを確実に発見できる技術を提供する。
【解決手段】箱詰め装置は、ロボットにより作業ハンド16を移動させてチューブTを箱詰めする。チューブTは予め物品列TAの状態で整列されており、作業ハンド16は各フィンガ18にチューブTを引っ掛けた状態で物品列TAを保持し、収容箱14内に箱詰めする。両側のフィンガ18にはそれぞれ内部にフォトセンサ24が収容されており、その間のフィンガ18には径方向に貫通孔が形成されている。フォトセンサ24の検出光Lは貫通孔を通って一方から投光され、他方で受光される。箱詰め後に作業ハンド16を退出させてフォトセンサ24による検出を行い、チューブTが残存しているか否かを自動的に検出する。
(もっと読む)
包装済石英ガラスルツボ用クレーン装置およびこの装置を用いる包装済石英ガラスルツボの梱包方法
【課題】包装済ルツボのハンドリングを人手に頼ることなく機械を介して実現する、包装済ルツボのハンドリングに適したクレーン装置を提供する。
【解決手段】包装済の石英ガラスルツボを配置した吊り上げ場所の上方と梱包用コンテナを配置した吊り降ろし場所の上方との間の経路上を往復動可能に、かつ該経路から前記吊り上げ場所および吊り降ろし場所のそれぞれにおいて前記経路に対して昇降可能に設置されるクレーン装置であって、前記昇降方向に延びる4本のアームを有し、該4本のアームを四角形の頂点に配置するとともに、該四角形の対角線上のアーム対を相互に進退可能に設け、各アームは先端に前記アームの進行方向に延びる爪を有するものとする。
(もっと読む)
箱詰め装置のコンベア
【課題】複数種の装置を備えた箱詰め装置において箱高さに応じて容易に調整を行うことができる箱詰め装置のコンベアを提供することである。
【解決手段】本発明に係るコンベア100は、蓋開機構810、箱詰装置820、ダンボール箱組立装置830を含む箱詰め装置800に設けられ、複数種のダンボール箱900の高さに応じて上下昇降装置400によりコンベア100の搬送面を鉛直上下方向(矢印Zの方向)に移動することができる。
(もっと読む)
物品の箱詰装置
【課題】収納箱内に複数の物品を一度に収納することができる物品の箱詰装置を提供すること。それぞれの物品を載せた載置手段が回転体によって容易に移動でき、複数の物品を所定の範囲内に配置することができる箱詰装置を提供すること。反転動作によって物品を収納箱内に収める場合に、載置手段を収納箱内に落とすことなく、物品だけを収めることができる箱詰装置を提供すること。
【解決手段】本発明の物品の箱詰装置は、複数の物品を所定範囲内に配置する基台10と、開口部を下面とした収納箱20を基台10の上面に被せる収納箱搬送手段30と、収納箱20を基台10上に被せた状態で基台10を反転する反転手段40とを備え、反転手段40による反転動作によって物品を収納箱20内に収納することを特徴とする。
(もっと読む)
箱詰装置
【課題】板状物の束を箱内に円滑に収納する。
【解決手段】板状物の束1が起立状態で載せられる往復移動可能な可動テーブル2と、可動テーブルに出没可能に取り付けられ、板状物の束を可動テーブルに載せる際に没入状態になり、可動テーブルが往動する際に突出状態になって板状物の束を後方から支えるプッシャ3と、可動テーブルと共に往動する板状物の束の前方に配置され、往動して来たこの束の前端に当接するストッパ4と、往動して停止した可動テーブル上の板状物の束をその下方が窄むように挟持し、可動テーブルが復動した後に板状物の束を解放して下方の箱5内に落下させるクランプ板6と、可動テーブル上に板状物の束を起立状態で保持し、可動テーブルが往動する際に板状物の束をクランプ板間に案内するガイド7とを具備する。カートンのような板状物を重ねた重い嵩張った束を簡易かつ迅速に箱に詰めることができる。
(もっと読む)
餃子のトレー詰めのための起立姿勢保持装置
【課題】成形されてコンベアにより搬送される餃子を、コンベアの送出側の転回端部から起立姿勢に保持してトレー内に落とし込む異ができ、起立姿勢でのトレー詰めを容易に可能にする餃子のトレー詰めのための起立姿勢保持装置を提供する。
【解決手段】
餃子成形機Mから送出される餃子Gを、起立姿勢で搬送する餃子送りコンベア1と、コンベアの前端部1aの回転送行部11と対向して所要の高さ位置から下方向きの縦送行部31を含む起立姿勢保持を兼ねる落とし込み手段3と、餃子送りコンベア1の下方において、トレー供給部5より供給される餃子包装用のトレーTを餃子送りコンベア1の前端部からの落とし込み位置の下方に間欠的に送るトレー送りコンベア4とを設け、餃子送りコンベア1により送られる餃子Gを起立姿勢のままトレーTに落とし込み収納できるようにする。
(もっと読む)
ダンボールケーサー
【課題】内容物にかぶせた筒状のダンボールの底部の内フラップを簡単な機構で内容物の下側に折り畳むことの可能なダンボールケーサーを提供する。
【解決手段】筒状に引き起こしたダンボール1をかぶせることの可能な、内容物12を載せるための第一支持台4と、その片側に配置された第二支持台6と、反対側に昇降可能に保持された第三支持台8と、ダンボールを水平に移動させるダンボール移動手段11を設け、内容物を載せた第一支持台にかぶせたダンボール1を内容物と共に第二支持台上に移動させることで一方の内フラップ1bを内容物の下に折り込み、次いでダンボールを第三移動台に向かって移動させ、外側に折れ曲がっている他方の内フラップを上昇位置にある第三支持台の下に差し込み、次いで第三支持台を下降させてその内フラップ先端を押し下げ、その後ダンボールを第三支持台上に移動させることでその内フラップを内容物の下に折り込む構成とする。
(もっと読む)
耳折り装置付ロボットハンド及びそれを用いた箱詰め装置
【課題】 簡単な構成でもって包装体の耳部を折り曲げ、その耳部の先端をさらに底面側に折り曲げた状態の包装体を包装箱などに供給する箱詰め装置を提供すること
【解決手段】 ロボットアーム2の先端下面に、ロボットハンド10を取り付ける。ロボットハンドは、包装体を吸着する筒状本体11と、包装体の耳部4を折り曲げる耳折り部12とを備える。耳折り部を構成する一対の耳折り用爪25に、エア噴射装置から供給されるエアの通路51,53を設けるとともに、その通路内を流れるエアが耳折り用爪の下方内側に設けた吹出口52から噴射されるように構成した。耳折り用爪が閉じることで耳部が確実に折り曲げられ、さらに耳部の先端3aは吹出口から噴射されるエアにより、包装体の底面側に折り曲げられる。ロボットハンドを所定位置に移動し、包装体の吸着を解除することで包装体を箱に供給する。
(もっと読む)
貨物運賃の分析を用いた荷造システム及び方法
荷造方法は、小包の総重量を貨物運賃表と比較するステップ、それによって基準となる貨物運賃を決定するステップを含む。前記小包の総重量には、容器(22)、運送されることになる品物(24)、及び基準量のダンネージの重量が含まれる。所定の条件が満たされた場合、当該方法は、前記基準となる貨物運賃未満である貨物運賃内に前記小包の総重量が減少するように、分配されるダンネージの量を前記基準量のダンネージの量よりも下に減らすステップも含む。前記所定の条件には、貨物運賃における変化を超えた所定の割合;積荷重量の増加に対する限界重量を超えた所定の重量;空隙容量、該空隙容量に対する充填の程度、品物の種類、品物の重量、及びダンネージの種類を含めたダンネージの必要条件のうち1又は複数含まれる。  (もっと読む)
(もっと読む)
箱詰め装置
【課題】積層冊子1などの物品を自動的に箱詰めする。
【解決手段】第1駆動機構6によって垂直部材2,3および爪5が垂直移動し、各垂直部材間において、第2駆動機構によって各爪が突出し、物品が各爪に係合し、支持され、第3駆動機構13,14によって各垂直部材が水平移動し、その間隔が減少し、物品が各垂直部材間に挟まれ、第3駆動機構17によってプッシャ12が下降し、プッシャが物品に押し付けられ、垂直部材およびプッシャによって物品が押し曲げられる。その後、第1駆動機構によって垂直部材、爪および物品が下降し、垂直部材、爪および物品が箱19に挿入される。
(もっと読む)
コンテナ詰め込み装置
本発明の詰め込み装置は、層状積重ねステーション(A)、詰め込みステーション(B)、フォルダ・グルア(1)を出た箱を運搬し、これらを層状積重ねステーション(A)から送り経路(Ta)に沿って詰め込みステーション(B)に向けて送るよう設計された第1の箱コンベヤ(3)、サンプル採取ステーション(C)、取り出しステーション(D)、及び第1の箱コンベヤ(3)によって送られた箱を運搬し、これらをサンプル採取ステーション(C)から移送経路(Tt)に沿って取り出しステーション(D)に向けて移送するよう設計された第2の箱コンベヤ(10)を有する。 (もっと読む)
1 - 20 / 25
[ Back to top ]