
Fターム[3E054AA12]の内容
包装位置への供給−物品の供給 (7,769) | 包装対象物 (760) | 包装体 (293)
Fターム[3E054AA12]の下位に属するFターム
Fターム[3E054AA12]に分類される特許
41 - 60 / 80
第1ユニットから第2ユニットへ包装容器を移送するための方法と配置
本発明は、包装ラインにおける2つのユニット間で運動パターンを同期させるための方法と移送装置とに関し、1つのユニットは断続的に作動され、第2のユニットは連続的に作動される。本発明は特に、断続的に作動される充填ユニットと、連続的に作動される箱詰め機との間の移送装置を対象としている。移送装置は、チューブ・ピッカー/プレーサー(28)を支持するために配置されたフレーム(13)が備えられ、第1シャフトと第2シャフト(16,31)を中心とする同時旋回運動を行うために配置されており、第2シャフト(31)に直角の第3シャフト(48)を中心として回転を行うためである。フレームはさらに、チューブ間の間隔を調節するための手段と、充填ユニットの部分的に円形のコンベヤから容器が取り上げられる場合、回転運動の間、垂直位置での相違を相殺するための手段とが備えられている。  (もっと読む)
(もっと読む)
包装装置におけるプッシャ
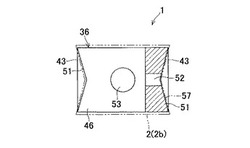
【課題】被包装体の変形を防ぐことができる包装装置のプッシャ。
【解決手段】包装装置で使用するプッシャ1のヘッド部分36の前面46に空気供給口53が形成され、側部43に空気吸引口52が形成される。空気供給口53は、プッシャ1の前端部が袋2bの内側にあるときに袋2bの内側と外側とを通気状態にすることができる。空気吸引口52は、袋2bの内側においてプッシャ1の前端部が退出する方向へ動くときに袋2bの空気を吸引して開口端部にまち57が形成されるように作用する。
(もっと読む)
商品供給・集積装置

【課題】複雑な駆動制御を必要とせず、バケットからの商品の飛出しを確実に防止して商品集積効率を向上させるとともに、バケットへの商品供給を円滑かつ正確に行う。
【解決手段】搬送面が水平な導入端と搬送面が傾斜した導出端との間で循環可能な商品供給コンベアと、無端状のチェーンC1に取り付けられ、導出端から供給される商品Pを保持し得る複数のバケット10を有する商品集積装置1とを設ける。空のバケット10が水平方向から斜め上方に傾いて配置される商品供給位置に移動したとき、ベルトコンベアの搬送面で位置決めされた商品Pが商品供給コンベアの導出端から空のバケット10に供給されるとともに、バケット群B1の最後尾の空のバケット10に対する商品供給動作が完了した後、最後尾のバケット10を商品供給時の移動速度よりも速い速度で商品集積位置まで移動させる。
(もっと読む)
食材充填カップにおけるカップと蓋の柄合わせ装置
【課題】 本発明は、カップの側面柄と蓋の上面柄の柄合わせを確実簡易に行うことのできる食材充填カップにおけるカップと蓋の柄合わせ装置を新規に提供するものである。
【構成】 本発明は、間歇走行するリテーナーコンベアに側面柄を付したカップを無雑作に吊下げして該カップ内に食材を充填するようにした装置において、該リテーナーコンベアの食材充填後の間歇走行区間下に食材を充填したカップを吸着してリテーナーコンベア上に上動し回転させる手段と該手段のリテーナーコンベアを挟んだ上方に該カップ内食材のはね飛散を防止するはね防止板と、上動した該カップの側方にカップの側面柄を読み取って一方向に向け揃えする回転制御センサーとを設けて、食材を充填した各カップの側面柄を該リテーナーコンベア上において一方向に向け揃えして、同方向に上面柄を向けた蓋の被着により各カップの側面柄と蓋の上面柄とを直列に柄合わせするようにしたのである。
(もっと読む)
少なくとも2個の複合の垂直成形筒体を具備するパッケージ製造設備
少なくとも2個の複合の垂直成形筒体を具備するパッケージ製造設備であり、上記設備は、少なくとも2個のそれぞれ離れた平行な行路をなす移送器具D、D’を備えた、単一の、モータ駆動の、中央部を通るコンベヤーを具備し、一時的に停止しつつ前進する前記行路は、前記設備の中央にある主モータCによって駆動される、パッケー製造設備。 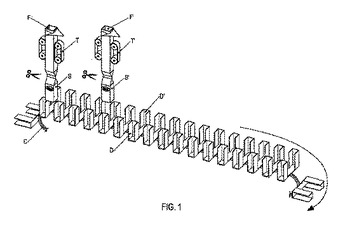 (もっと読む)
(もっと読む)
段ボ−ルシ−トの自動回転、横出し装置
【課題】 搬送と横出しコンベアを別個の電動ローラとし、さらに横出しロール全体の昇降装置まで必要とするため構造が複雑で、昇降および回転装置を設けた枠装置3の下の限られたスペースで交錯しているので、できるだけシンプルな構造にしたい。
【解決手段】 従来のように昇降および回転装置を設けた枠装置3の下に、搬送と横出しを共通の1式の電動ローラ2で行なうべく90度回転させて使い分ける回転装置5を設ける。
(もっと読む)
整頓装置とそれに用いる供給装置と整列装置と姿勢揃え装置
【課題】 簡易な構成で、複数の対象物の姿勢を揃える姿勢揃え装置を提供しようとする。
【解決手段】
従来の姿勢揃え装置にかわって、複数の対象物を保持する保持姿勢と開放する開放姿勢との間で各々に変化させる複数の把持機器と、複数の前記把持機器を各々に支持する複数の支持機器と、複数の前記支持機器を各々に回転させる回転機器と、複数の前記把持機器に各々に対応づけられ対応づけられた前記把持機器が保持する対象物の外周形状の少なくとも一部分を各々に検知できる複数の検知センサと、を備え、前記回転機器が複数の前記把持機器を各々に回転させている間に、複数の前記検知センサが複数の対象物の前記外周形状の一部分の設定形状が特定方向に向いたことを各々に検知した時に複数の前記検知センサに各々に対応づけられた複数の前記把持機器が姿勢を前記保持姿勢から前記開放姿勢に各々に変化させる、ものとした。
(もっと読む)
枕状包装袋の把持装置
【課題】 枕状包装袋を安定把持すること。
【解決手段】 枕状包装袋1の把持装置40であって、相対する把持バー41により、枕状包装袋1の正面視で硬質上シール部1Aの下部に位置する、軟質の両側縁部1Dを側方から押し込み把持可能にするもの。
(もっと読む)
集積装置
【課題】 コンパクトで高速処理が可能であり、高密度に安定して包装物を集積できる集積装置を提供する。
【解決手段】 搬送機構3による包装物1の搬送方向に沿った複数箇所に定ピッチPでプッシャー4a〜4jを配置する。このプッシャー4a〜4jは、エアシリンダ51で搬送面34に対して突出・退入可能とし、かつ水平駆動機構52で搬送方向に同期移動可能に構成する。搬送面上に平置きされた包装物1をプッシャー4a〜4jで押し上げて傾斜姿勢に変換した後、プッシャーを搬送方向に同期移動させて前記ピッチPを縮小し、包装物1を集積する。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
箱詰め装置
【課題】重量の比較的重い物品や比較的多数の物品を綺麗に整列させて確実に箱詰めする。
【解決手段】予め定めた数の整列させる物品をその整列の長さ方向の両側から保持部9により挟み込んで保持し、保持部9により挟み込まれている物品を押し込み部15により上から押さえて外装箱2に詰める。保持部により略水平方向に整列して保持された物品のうち略中央の物品を上方に向かって吸引するサクションボックスを設け、保持部による挟み込む力とサクションボックスによる吸引力によって物品を保持する。
(もっと読む)
耳折り装置付ロボットハンド及びそれを用いた箱詰め装置
【課題】 簡単な構成でもって包装体の耳部を折り曲げた状態の包装体を包装箱などに自動供給することのできる箱詰め装置を提供すること
【解決手段】 ロボットアーム2の先端下面に、ロボットハンド10を取り付ける。ロボットハンドは、包装体を吸着する筒状本体11と、包装体の耳部4を折り曲げる耳折り部12とを備える。筒状本体は、円筒状の上部筒体13と、その上部筒体の下方に移動可能に装着された下部筒体14とを備え、下部筒体の下面が貫通孔16を有する吸着部15となる。吸着部が包装体の上面に接触した状態で吸引駆動すると、包装体が吸着部に吸着され、さらに下部筒体ひいては包装体が上昇移動し、耳折り用爪25により耳部4が下方に向けられ、更に耳折り用爪25が閉じることで耳部が確実に折り曲げられる。ロボットハンドを所定位置に移動し、吸引を解除することで包装体を箱に供給できる。
(もっと読む)
めんなどの食材を充填した複数個並列容器の包装機側への押し送り装置
【課題】 本発明は、インスタントめんなどの食材を充填した複数個並列の容器を一列にして包装機側へ押し送りする装置を設備費低廉にして制御容易にしたものである。
【構成】 本発明はインスタントめんなどの食材を充填し蓋被せシールしてリテーナーコンベアの端部上に到達した複数個づつ並列の角形を含む容器を下方より上動する押し上げ棒にて一列づつ固定の整列台上に押し上げ、該押し上げ容器列を同軸回転する各別のチェン間に前後にずらして設ける各別の押し棒にて個別押しして各容器を整列台上にて前後させ、次いで該各容器を横長バーにて先狭とするガイドレール間を押し前進させて一列に寄せ並べして先端の先狭口より包装機側に押し送りするようにしたことを特徴とするめんなどの食材を充填した複数個並列容器の包装機側への押し送り装置にある。
(もっと読む)
コラプシブル型の容器を分配ユニットに配置するためのデバイスおよび方法
デバイスは、コラプシブル型の充填密封済の容器(2)を分配ユニット(3)に配置するためのデバイスであり、前記容器(2)はパッキング位置(B)に移動させられ、この位置において、前記容器(2)は吊り下げられて且つ水平な長手方向軸線(A1)に沿って配置されるようになる。デバイスは、前記パッキング位置(B)での容器(2)の数と対応する多数のフィンガ対(14)を含み、非グリップ状態にある場合に、各フィンガ対(14)が前記容器(2)を通すことができるフィンガ隙間(17)を有するようになる、グリップユニット(6)を備える。前記グリップユニット(6)はグリップ状態まで作動することができ、このグリップ状態において各フィンガ対(14)は絞り動作を行って前記容器(2)を掴むようになり、このような絞り力によって、前記容器(2)の内容物は、内部の圧力に対応した構造をとるようになり良好なグリップをもたらす。 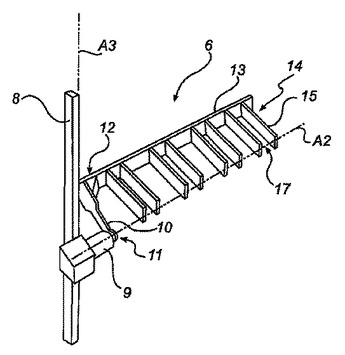 (もっと読む)
(もっと読む)
包装品のグループを形成する装置
製品の包装品(11)を一緒にグループ化する装置(10)、特には、適当な容器に箱詰めされるグループ(13)を形成する装置(10)が、グループ化領域(14)に包装品(11)を位置決めする手段(12)を備え、これらのグループ化領域に包装品を位置決めする手段(12)は、包装品を拾う位置と、包装品を解放するグループ化領域の位置と、の間で動く包装品供給手段からなる。 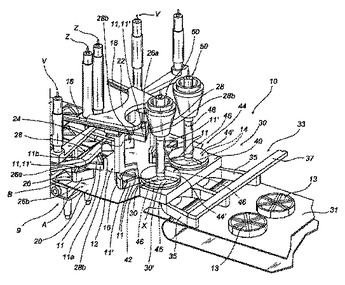 (もっと読む)
(もっと読む)
食品搬送装置
【課題】ワークに割れが発生しにくく、また、割れクズが発生しても堆積しないようにした食品搬送装置を提供する。
【解決手段】第2コンベア2は上部コンベア4と下部コンベア6からなり、上部コンベア4は、柔軟性を有して被包装物Wの上部に当接する押えベルト8を備える一方、下部コンベア6は、被包装物Wを載置するために、所定の間隔をおいて配設され同一方向に回転駆動される一対のチェーン32,32間に、柔軟な表面を有する弾発部材33をチェーン32の送り方向に所定の間隔をおいて送り方向に直交する方向に掛張させてなる。
(もっと読む)
フラップ開口装置およびこれを備えた箱詰め装置
【課題】段ボール箱のフラップを開口した状態に確実に保持して、箱詰め工程における歩留まりを上げることができるフラップ開口装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1においては、上部フラップ保持部82が、上面フラップYaを内面側から係止している。また、ガイド部材83は、左右側面フラップYb・Ycを内面側から係止している。また、ツメ部71が定位置に固定配置されており、第1搬送機構61が、ツメ部71が段ボール箱Yのフラップを開口できる位置まで段ボール箱Yを搬送する。
(もっと読む)
搬送装置およびこれを備えた箱詰め装置
【課題】整列させた物品列の長さが変化した場合でも、プッシャを交換することなく処理を行うことが可能な搬送装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置では、リフト機構53上において、両側を支持部材53b,53cによって支持された状態で載置された複数の商品Xの束を横送りする際には、所定の間隔で切り込みが形成されたプッシャ52aによって商品Xの束の整列方向に交差する方向に商品Xの束を押し出す。
(もっと読む)
搬送装置およびこれを備えた箱詰め装置
【課題】整列不良の物品の束を下流工程に受け渡すことを回避して全体工程における効率化に寄与することが可能な搬送装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1は、第1バケット41と、第2バケット42と、背板44a,44bとをそれぞれ独立して駆動するように構成された、いわゆるトリプルループ構成において、検知部48が、商品Xの束の整列状態が不良であることを検知すると、制御部49が、商品Xの束を排出位置Rよりも下流側に設けられた排出部60まで搬送するように第1〜第3駆動モータM1〜M3を制御し、また、第1横送り機構51が作動しないように制御している。
(もっと読む)
カートナー
【課題】カートンの上方に物品を押し出し、その物品をそのまま下ろしてカートンに挿入するというレイアウトが求められるカートナーにおいて、物品を無理なく正しい姿勢でカートンに挿入できるようにする。
【解決手段】上面の開口したカートン101の上方に水平方向へのスライドが可能なシャッタ110を配置する。シャッタ110をシャッタ駆動装置111が、カートン101を覆う進出位置と、カートン101を露出させる退避位置との間で移動させる。シャッタ110の上方に配置された真空吸着式の移載チャック120は、進出位置にあるシャッタ110の上に押し出し装置で押し出された物品2を吸着して上昇する。その後シャッタ110は退避し、移載チャック120は降下してカートン101に物品2を挿入する。
(もっと読む)
41 - 60 / 80
[ Back to top ]