
Fターム[3E054FB11]の内容
包装位置への供給−物品の供給 (7,769) | 物品の取扱い(積重ね) (121) | 瓦屋根状の積重ね (14)
Fターム[3E054FB11]に分類される特許
1 - 14 / 14
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品ハンドリング装置

【課題】物品を順次搬入する物品搬入コンベアから物品を取り上げ、物品受け止め部に積み込むという作業を能率良く遂行することができる物品ハンドリング装置を提供する。
【解決手段】物品ハンドリング装置10において、複数の物品1を順次搬入する物品搬入コンベア11から、移載ロボット12の第1ピッキングヘッド13と第2ピッキングヘッド14が交互に物品1を1個ずつ吸着し、第1物品受け止め部16または第2物品受け止め部17に積み込む。第1ピッキングヘッド13と第2ピッキングヘッド14を独立して三次元移動させる制御装置15は、第1ピッキングヘッド13と第2ピッキングヘッド14の一方が物品搬入コンベア11から物品受け止め部16、17に向かい、他方が物品受け止め部16、17から物品搬入コンベア11に向かうとき、相互を安全距離に保つ。
(もっと読む)
複数の食製品の半重ね方法及び装置
【課題】扁平状な食製品を半重ねする方法及び装置を提供する。
【解決手段】食製品5を搬送する搬送コンベア7の搬送方向に長い一対の製品受け部材23を開閉自在に備えた製品受け装置19における前記一対の製品受け部材23を、前記搬送コンベア7における搬送方向の上流側へ相対的に移動し一対の製品受け部材23を閉動作して、当該一対の製品受け部材23の長手方向の受け入れ位置に、食製品5を受け入れて保持する。次に、前記一対の製品受け部材23の長手方向の前記受け入れ位置よりも上流側の所定位置に対応する下方位置に、前記次の食製品5が達したときに、前記一対の製品受け部材23を開動作して、保持していた食製品5を前記次の食製品5に重ねる。そして、前記次の食製品5が前記受け入れ位置に対応したときに、前記一対の製品受け部材23を閉動作して重ねた状態の食製品5を受け入れて保持することを、複数回繰り返す。
(もっと読む)
食品整列供給システム
【課題】簡単な構造で、食品を搬送しつつその厚さ方向を横に向けて縦横に複数列をなすように整列した食品群として包装装置に供給することのできる食品整列供給システムを提供する。
【解決手段】伏姿勢で載置される多数の食品Fを複数の列に整列して供給搬送する整列搬送装置2と、送り出されてくる各列の食品Fを単列ずつに区分するとともに、搬送しつつ起立姿勢にして送り出す姿勢変更搬送装置3と、送り出されてくる各列の食品Fを列を保持した状態で中間搬送するとともに搬送方向後端で各列の間隔が狭くなるように寄せる中間搬送装置4と、送り出されてくる各列の起立姿勢の食品Fを各列について1個ずつの横方向に並んだ食品群FGとして送り出すグループ形成装置5と、グループ形成装置5から送り出されてくる食品群FGを排出搬送する排出搬送装置6と、制御部7とを設ける。
(もっと読む)
包装袋の集積装置
【課題】高速搬送されてもなお包装袋を所望の形態で集積できるようにする。
【解決手段】包装袋Wを一列に並んだ状態で給送する搬入コンベア10と、この搬入コンベア10から包装袋Wが一袋移載されるごとに包装袋Wにおける搬送方向に沿った長さよりも短い距離ずつ間欠移動し、かつ当該間欠移動に伴って互いに一部が重なり合う形態で積み重ねられた包装袋Wが所定数に達したところで所定数の包装袋Wを搬出位置に揃って移載すべく高速移動する集積コンベア15と、この集積コンベア15との間で包装袋Wを弾性的に挟圧可能で、かつ集積コンベア15と同期的に移動可能な保持用コンベア30とが具備されている。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
箱詰め装置
【課題】製品を把持した後、旋回させることなく上下動させるのみで箱内への投入を行うことにより、製品の旋回に要する機構・工程を省略して簡素化し、製造コストを低減し、スペースを削減し、箱内への投入速度を向上する箱詰め装置を提供する。
【解決手段】無端のテーブルコンベヤ4,5は、同じ循環経路を構成するように揃えられているとともに各々が別々のサーボモータで駆動される。テーブルコンベヤ4,5は、供給コンベヤから順次供給される製品が移載されてサシミ状又は平置き状に集合される集合テーブル11,15を有しており、集合テーブル11,15が互いに重なることなくずれた状態で駆動される。投入装置50は、集合された製品群を一括把持する把持装置を備えており、集合テーブル11,15が次の集合のために移動した後、空いた空間を通じて下方に駆動され、把持した製品を直下に配置されている段ボール箱に投入する。
(もっと読む)
方向転換装置を備えた箱詰装置
【課題】物品の搬送時における搬送姿勢を短時間でかつ確実に転回できる方向転換装置を備えた箱詰装置を提供することである。
【解決手段】本発明に係る方向転換装置220を備えた箱詰装置100は、方向転換装置220が転回装置221、回動軸222および回動板230からなる。転回装置221が包装物110f,110gに当接して、包装物110f,110gに力が付与されるとともに、回動軸222および回動板230により転回装置221による当接位置と異なる位置に力が付与される。
(もっと読む)
トルティーヤチップを積み重ねる方法および装置
【課題】スリーブ形の容器に収容するために、湾曲した三角形の形状のスナックフードチップ、例えばトルティーヤチップを積み重ねる。
【解決手段】スナックフードチップ10は、第1のU字形の振動するシュート30に供給され、シュート30は自動的にスナックフードチップ10の頂点Aが隣のスナックフードチップ10の対向する底辺Bを越えて延在するようにし、スナックフードチップが軸として湾曲する直線がU字形のシュート30の長手方向と平行になるようにスナックフードチップ10を自動的に配置する。スナックフードチップ10は、W字形のシュート40に供給されて、対向する向きを指すスナックフードチップ10は自動的にシュート40の対向するトラフ内に落下する。スナックフードチップ10は、上向きの頂点Aが移動方向を指すように自動的に120度回転されて、互いに重なり合うように摺動してせり上がりながら自動的に積み重ねられる。
(もっと読む)
硬貨包装装置
【課題】安定的な集積と、集積高さの正確な検出とを両立することができる硬貨包装装置の提供。
【解決手段】硬貨Cを順次下に積み重ねて集積硬貨CCとする集積部15と、集積硬貨CCの周囲に包装紙を巻き回して包装硬貨とする包装部16とを備えており、最も上側の硬貨Cを上から押さえる上下動自在の押さえ部材25と、押さえ部材25の内側に上下動自在に設けられ最も上側の硬貨Cに当接して集積硬貨CCの高さを検出する高さ検出部材31とが設けられている。
(もっと読む)
物品供給装置
【課題】脆い性状の物品の切り出しを不良品を発生させることなく行ない得ると共に、個々の厚みに誤差がある物品の切り出しを確実に行なって供給する。
【解決手段】物品Wを積み重ねて収容するマガジン10の下方に、切り出しコンベヤ12が走行自在に配設される。切り出しコンベヤ12に、物品Wを所定個数単位で切り出す切り出し手段16が配設される。切り出し手段16は、物品搬送方向の後方に向けて下降傾斜する物品載置面30aを形成した複数の支持部材20,22,24,26と、水平な物品載置面34aを形成した支持部材28とを備える。各支持部材22,24,26,28の前端に、最下位の物品Wの後部を引掛けて押し出す押出部32,36が形成される。そして、切り出し手段16がマガジン10の下方を通過することで、物品Wが1個ずつ切り出されて下流側に搬送される。
(もっと読む)
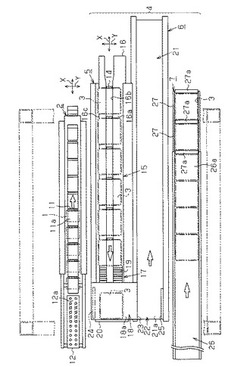
包装装置及び包装方法
【課題】連続して送り出される包装シート(12)を筒状連続体(20)に整形するフォーマ(13)と、筒状連続体(20)の上流端内に被包装物(A)を供給する物品供給装置(34)と、筒状連続体(20)に整形された包装シート(12)の両側縁を溶着するセンタシール装置(16)と、その下流側のエンドシール装置(6)を具備し、前記エンドシール装置(6)は、前記筒状連続体(20)の最下流部に位置する包装単位数の被包装物(A)の組と、これの上流側に隣接する被包装物(A)の組の相互間にて前記筒状連続体(20)を挟圧することにより溶着すると共に切断する包装装置に於いて、包装シート(12)の必要量を少なくする。
【解決手段】筒状連続体(20)の最下流部に位置する被包装物(A)の組が充填されている切断対象部(S)を、前傾姿勢にする傾斜機構(4)が設けられ、エンドシール装置(6)は、前記姿勢に傾斜された前記切断対象部(S)の後端を溶着すると共に切断する。
(もっと読む)
食品の盛り付け方法及び装置
【課題】 海苔巻き、伊達巻、かまぼこなどの棒状食品を輪切り状に切断してなる扁平状食品を見栄えよく整列させて弁当容器等の容器に盛り付ける場合に、人手に頼ることなく自動化可能にする。
【解決手段】 水平に配置されたベルトコンベア1上に棒状食品を輪切り状に切断して複数の扁平状食品n1〜n4を列状に並べた状態で載置する第1ステップ3と、複数の扁平状食品間に隙間を開ける第2ステップ4と、複数の扁平状食品を列方向に押し端側に位置する扁平状食品を前記コンベア面上に押し倒し、残りの扁平状食品を前記端側扁平状食品に寄り掛ける第3ステップ5,6と、扁平状食品を前記寄り掛け姿勢のまま一括把持して容器13に移し替える第4ステップ7とからなる。
(もっと読む)
袋詰装置
【課題】従来より容積の小さな袋を用いて自動包装し得るようにする。
【解決手段】袋11を横向き姿勢で挟持移送する保持手段13を備える袋移送コンベヤ12に並設した供給コンベヤ29に、被包装物14を収容するバケット31が配設される。供給コンベヤ29に並設した移動コンベヤ38に、バケット31の被包装物14を袋11に挿入する詰込手段39が配設される。詰込手段39に、被包装物14の下部を受け具43aで支持して押送する挿入部材43と、挿入部材43の後退に際して被包装物14の物品挿入方向後部を支持する物品支持部材49が配設される。物品支持部材49での物品支持解除に先立ち、被包装物14の物品挿入方向後部を袋下面側から支持する姿勢維持部材56が、シール手段の配設位置まで袋11の移送と共に移動するよう構成される。
(もっと読む)
1 - 14 / 14
[ Back to top ]