
Fターム[3F022LL38]の内容
Fターム[3F022LL38]に分類される特許
21 - 40 / 42
鉛直循環搬送設備
【構成】 棚を鉛直循環させる内部スペースを囲む内壁と、内壁を外側から囲む外壁とを設けて、内部スペースに棚を配置する。棚の対角位置に設けた一対の突出部を、内壁に設けたスリットから内壁と外壁との間の外部スペースに突き出させて、各突出部をエンドレスの駆動部材に取り付け、さらに駆動部材の駆動機構を外部スペース内に設ける。また外部スペースを貫通して内部スペースと設備の外部とを接続する物品の搬出入用のトンネルを設ける。
【効果】 棚を安定した姿勢で鉛直循環させることができ、駆動部などでの発塵で棚などを汚染しない。
(もっと読む)
搬送システム

【課題】フロア間における搬送効率を向上させると共に、レイアウトの自由度を高める。
【解決手段】1階及び2階の2つのフロア間で昇降可能な搬送ケージ34、44をそれぞれ有する第1及び第2リフタ装置30、40を備えている。第1及び第2リフタ装置30、40は、第1収容領域34a、44a及び第2収容領域34b、44bをそれぞれ有している。第1及び第2収容領域34a、44a、34b、44bは、いずれも1つのキャリア2を収容可能な領域である。また、各フロアには、該フロアに設置された第1ストッカ3又は第2ストッカ4の搬入ポート3a又は4a、搬出ポート3b又は4bと、搬送ケージ34、44の第1収容領域34a、44a及び第2収容領域34b、44bとの間でキャリア2の移載を行うローダ20がそれぞれ設けられている。
(もっと読む)
移動装置、システム、移動方法及び移動プログラム
【課題】 一度、GPSの電波が遮蔽される場所に置かれた物品が他の場所に移動される場合でも、その物品を置かれている位置を取得し、その位置まで移動することが容易な技術を提供する。
【解決手段】 可動のトレイには、マーク及びRFIDが付与されている。搬送ロボットは、カメラと、リーダと、センサ等とを有する。搬送ロボットは、カメラにより撮影された画像における、マーク情報と一致する領域の位置からトレイの位置を検出する。さらに、搬送ロボットは、リーダが、RFIDの保持するIDと一致する情報を読み取った時の電波強度から、トレイの位置を検出する。搬送ロボットは、目的地とするトレイを、カメラ及びリーダにより検出しながら移動する。
(もっと読む)
板状物保管移送装置および板状物保管移送方法
【課題】 FDP用基板などの板状物をその雰囲気下で扱う清浄な雰囲気の第1の領域に隣接した、該第1の領域よりも清浄度の低い第2の領域を、板状物を収納する密閉容器を保管箇所とし、第1の領域と第2の領域との境部において、高い清浄度の下で、該板状物を前記第1の領域、前記第2の領域の一方側から他方側に移送することができる、板状物の保管移送システムを提供する。
【解決手段】 板状物を収納する密閉可能で開閉部をその側面側に有する板状物容器と、前記第2の領域に配設され、板状物容器を格納する板状物容器格納部と、前記第2の領域に配設され、該板状物容器を搬送、格納するめに載せる板状物容器載置部と、前記両領域の境部に配設され、板状物を、前記第1の領域、前記第2の領域の一方側から他方側に移送する際に、前記第1の領域の雰囲気の下で、板状物容器の開閉部を開くことができるように準備する容器開閉準備機構部と、第1の領域側に配設され、板状物を板状物容器から出し入れする板状物出し入れ部とを、備えている。
(もっと読む)
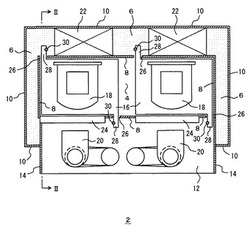
クリーンルーム内装置とクリーンルーム内システム
【構成】 処理装置4の物品搬出入用のシャッタ8の周囲3方に、出退自在な庇22を設ける。無人搬送車が到着すると、庇22を前進させて処理装置4と無人搬送車の間の隙間を塞ぎ、処理装置4や無人搬送車からの高クリーン度の空気で物品の搬出入経路を充たす。搬出入後のシャッタ8等を閉じると、庇22を後退させて無人搬送車の走行を容易にする。
【効果】 無人搬送車と処理装置との隙間から、低クリーン度の空気が物品側に侵入しない。
(もっと読む)
部品搬送装置および方法ならびに作業ハンド
【課題】部品の搬送および空の部品箱の回収を行うシステム全体を簡素化して設備コストを抑える。
【解決手段】作業ハンド25を備えたロボット5は、上下ガイド部9および走行ガイド11によって部品棚1の各間口に対して移動可能であり、部品棚1に収容した部品箱3内の部品を作業ハンド25の先端に設けたバキュームカップで吸着把持してキット箱7に投入する。この際キット箱7は、ロボット5と一体となって移動するキット箱支持部15に移載された状態である。空になった部品箱3は、作業ハンド25を空の部品箱3の下部に侵入させた後、上昇させることで、上部に設けてある第1,第2各部品箱受け板上に載せ、外部の空箱回収部61に搬出する。
(もっと読む)
物品情報の読取装置を備える移動体
【課題】読取装置を用いて棚装置に収納された物品に取り付けられたRFIDタグから物品情報を読み取るための読取作業の際に、使用者に対する肉体的な負担を軽減することができる物品情報の読取装置を備える移動体を提供すること。
【解決手段】複数段の棚板5を備える棚装置1に収納された物品7に取り付けられたRFIDタグ8に記憶された物品情報を非接触式で読み取り可能な読取装置16と、該読取装置16を上下昇降自在に支持する支持手段23と、前記読取装置16が読み取った物品情報を処理する情報処理装置22と、該情報処理装置22が処理した物品情報を表示する表示装置22’と、床面上を走行可能なキャスター19と、を備える移動体17を構成する。
(もっと読む)
ピッキング方法およびピッキングシステム
【課題】サイクルタイムを向上することができるピッキング方法およびピッキングシステムを提供する。
【解決手段】複数の収容部310のなかで開状態にある一の収容部からロボット100により現在のワークを取り出す取り出し段階と、次のワークが収容されている他の収容部を複数の収容部のなかから特定する特定段階と、ロボットが他の収容部から次のワークを取り出す際に、当該取り出し時点で開状態にある一の収容部と当該ロボットとが干渉するか否かを判断する判断段階と、開状態にある一の収容部とロボットとが干渉しないと判断される場合には、開状態にある一の収容部を開状態に維持したままロボットが他の収容部から次のワークを取り出す一方、干渉すると判断される場合には、ロボットが他の収容部から前記次のワークを取り出す前に、一の収容部をロボットにより閉状態に戻すように制御する制御段階と、を有する。
(もっと読む)
買物支援システム、買物支援方法、および買物支援プログラム
【課題】 店舗内に複数のロボットを配置し、買い物客が最寄のロボットに購入商品を預けておき、精算前にまとめて受け取ることを可能とする買物支援システムを提供する。
【解決手段】
店舗内の複数のロボットと通信可能な管理サーバとから構成される買物支援システムであって、該ロボットは、購入者および預かった商品を識別して管理サーバに登録する手段と、預かった商品を保管場所に搬送する手段と、購入者毎に仕分けして引き渡す手段を有し、管理サーバは、ロボットが商品を預かる際に保持する商品状態情報のテーブルをもとにロボットに処理させるタスクを制御することを特徴とする。
(もっと読む)
基板収納設備及び基板処理設備
【課題】基板の清浄度を維持することができ、且つ、設備費用を抑えることができる基板収納設備を提供する。
【解決手段】収納容器2のファンフィルタユニット64を装備した側を移動空間側に位置させ且つ収納容器2の出入り口側を移動空間から離れる側に位置させる状態で収納容器2を収納部4に収納するように、収納容器2を入出庫部及び収納棚5における収納部4に搬送する収納容器搬送装置8の作動を制御する。
(もっと読む)
商品出荷先のトレース方法及びトレースシステム
【課題】 不良品(例えば品質低下、異物混入、包装袋の破れ等)が梱包工程後に発見され、不良の波及範囲がその製造日時の前後一定時間内に製造された商品に限定されるような場合にはその不良の虞のある商品群のみを市場から確実に回収し、或いは市場へ出荷されることを確実に回避できること。
【解決手段】 各パレット毎の積載開始日時情報及び積載終了日時情報を取得し各パレット毎の出荷実績を取得し取得された積載開始日時情報及び積載終了日時情報と出荷実績とを、対応するパレット識別情報を介して結び付けて記憶させることでデータベースを生成し与えられたパレット積載日時を検索キーとして、又は与えられた製造日時から既知の遅れ時間を考慮して算出されたパレット積載日時を検索キーとして前記データベースを検索することによりその商品が積載されていたパレット又はその商品が出荷された出荷先を抽出する。
(もっと読む)
部品供給システムおよび部品供給方法
【課題】いわゆるキット箱方式の部品供給を前提として、部品取り出し時における作業者の歩行工数の削減を図った部品供給システムを提供する。
【解決手段】 ロータリーコンベヤ6の上に多数の部品棚7を配置して部品ストッカー3とし、部品セットエリア4には部品が組み付けられる製品毎のキット箱5を待機させる。工場生産管理・指示装置10からピッキング制御装置11に製品の生産順序情報を取り込み、製品種別毎の固有の組付部品情報とに基づいて、最も効率的な部品ピッキング作業順序情報を作成して部品ストッカー3に与える。部品セットエリア4で作業者M1が部品ピッキング作業を行って複数製品分のキット箱5に順次投入した上で、一組の部品セットが投入されたキット箱5を生産順序情報にしたがった順番で組立生産ラインに供給する。
(もっと読む)
在庫管理ロボットおよびそれによる在庫管理方法
【課題】RFIDによる在庫管理を行う在庫管理ロボットに関し,商品に付けられたRFIDタグの読み落としや読取りミスを防ぎ,正確な読取りを可能にする。
【解決手段】移動制御部14は,移動用モータ51を制御することにより移動機構部50を動かし,在庫管理ロボット1をRFID読取り位置近傍の移動目標位置に移動させる。可動アーム制御部12は,可動アームモータ31を制御することにより,可動アーム30に取り付けられたRFIDリーダ20をRFID読取り位置に移動する。RFID読取り部11は,RFIDリーダ20からRFIDタグの情報の読取り結果を取得する。読取りが不安定な場合,異なる位置での読取りを複数回行い,結果を統計処理する。RFID読取り位置の移動には,カメラ40から得た視覚情報を利用する。
(もっと読む)
ピッキング方法およびピッキングシステム
【課題】準備工数および教示工数などが低減された、汎用性に優れたピッキング方法を提供する。
【解決手段】ピッキング対象部材が収納されている収納部の近傍に設けられた第1の無線端末と、ピッキング対象部材をピッキングするロボットハンドの近傍に設けられた第2の無線端末とからそれぞれ送信される無線信号を受信する受信段階と、第1および第2の無線端末から送信される無線信号の受信結果から、収納部およびロボットハンドの3次元位置を算出する位置算出段階と、算出された収納部およびロボットハンドの3次元位置に基づいて、ロボットハンドを収納部に向かって誘導する誘導段階と、を有する。
(もっと読む)
遊技機の搬送システム
【課題】 搬送装置が分配搬送すべき各出荷ラインの処理効率が相違しても、状況に対応して適切な搬送処理を行い出荷処理効率を向上させ得る搬送システムを提供する。
【解決手段】 複数の遊技機PMが積載されたパレット12から搬送ロボット18により遊技機を順次取り出して、並列に設けられた複数の出荷ライン20A,20Bに遊技機を振り分けて搬送するように構成された搬送システムにおいて、各出荷ラインの前段部に、搬送ロボット18により搬送されてきた遊技機を受容して、各出荷ラインにおける出荷作業の進捗により受容した遊技機が順次処理されるまで一時的に待機させる待機ステージ21A,21Bを設け、搬送ロボットが各出荷ラインにおける待機ステージの在荷状況に応じて、待機ステージが空いている出荷ラインへの搬送を優先して行うように構成する。
(もっと読む)
パレット化された個品の回転中にRFIDトランスポンダに問い合わせるシステム及び方法
本発明は、コンピュータによる制御に適合された市販されているパレット包装機を含み、RFIDトランスポンダ読取装置がパレット包装機(302)のカートリッジ(316)装置に搭載されているシステムを使用して個品を保護フィルム(314)で包むなどの通常の加工、製造又は出荷プロセスに組み込まれているように、個品(308)がRFID読取装置(304)の方へ向けられているときに個品を回転させることによって個品に添付されているRFIDトランスポンダ(306)を読み取ることに関する。コンピュータは、パレット包装機及びRFID読取装置(304)を制御するプログラマブルロジックコントローラとインターフェイスを行う。コンピュータは、個品をパレットに固定するため、所定回数の出荷用フィルムの包装を個品及びパレットの一部の周りに巻き付けさせる。パレット上の個品に添付されているRFIDタグ(306)は、出荷用フィルム(314)を保持するカートリッジ(316)に搭載されている固定したRDIF読取装置(304)の近くで個品が回転するときに読み取られる。  (もっと読む)
(もっと読む)
部品組立装置
【課題】 複数の個別部品にて組み立てられる組立部品の組立ての際に、個別部品の誤搬入による搬入作業の停止頻度を少なくして組立部品の生産性を高めるようにした部品組立装置を提供する。
【解決手段】 次に組み立てられる組立部品の組立てに用いられる個別部品の数と同じ回数の搬入があると、搬入された個別部品が次に組み立てられる組立部品に用いられる個別部品であるかどうかを判定する。搬入された個別部品に、次に組み立てられる組立部品の組立てに必要でない個別部品が混ざっている場合、組立てに必要な個別部品が搬入されるまで組立てを中止する。
(もっと読む)
仕分け装置
【課題】省スペース化を図ることができる仕分け装置を提供する。
【解決手段】仕分け装置11は、物品Wを搬送する搬送ライン12と、搬送ライン12からの物品Wを仕分ける仕分け手段13とを備える。仕分け装置11は、仕分け手段13で仕分けた物品Wを搬送する複数の分岐搬送ライン14を備えている。対応する分岐搬送ライン14からの物品Wを一旦保持した後にその物品Wを複数の台車18の中から選択した台車18上に積み付ける複数の仕分け積付手段19を各分岐搬送ライン14に対応して配設する。
(もっと読む)
出庫システムおよび出庫方法
【課題】日々の出庫量や各ピッキング処理部の処理能力が変動しても、出庫オーダの割り振りを適切に行うことができ、全体作業を最短時間で終了させることができる出庫システムおよび出庫方法を提供する。
【解決手段】保管設備1と、保管設備から第1または第2ステーション11,21に、指定された製品をユニット単位で搬送する搬送設備と、各ステーションに搬送されたユニット単位の製品の中から、指定された数量の製品をピッキングする第1および第2ピッキング処理部と、搬送設備に対して出庫指示を行う管理装置31,32とを備える。管理装置は、予め設定された期間内に処理すべき出庫オーダを、第1ピッキング処理部の処理に適したものほど上位に、第2ピッキング処理部の処理に適したものほど下位になるように並べ替え、上位の出庫オーダの製品から順に第1ステーションに、下位の出庫オーダの製品から順に第2ステーションに搬送させる出庫指示を行う。
(もっと読む)
基板保管装置
【課題】基板に残留応力が蓄積しにくい基板保管装置を提供する。
【解決手段】この基板保管装置は、上下方向に積層配置され、基板Sを1枚ずつ保管する複数の基板保管棚21を備えており、複数枚の基板Sを上下方向に積層状態で保管することができる。各基板保管棚21は、基板Sを浮遊状態で保持する気体ベアリング機構17を有している。気体ベアリング機構17は、隔壁40(支持部材)と、この隔壁40に固定されて当該隔壁40の上方に上空気流通路44(気体流通空間)を区画するとともに、この上空気流通路44に供給される気体を上方に吹き出す上フィルタ膜とを備えている。
(もっと読む)
21 - 40 / 42
[ Back to top ]