
Fターム[3F072GG01]の内容
Fターム[3F072GG01]に分類される特許
41 - 60 / 67
容器から桿状体を配送する装置及び方法並びに後続の搬送装置
本発明は、容器(1)から桿状体(2)、すなわち配送口(3)を有するホッパーからペットボトル用加工材料(プリフォーム)を配送する装置であって、配送口(3)に回転する円板(5)が備えられていることを特徴としている。 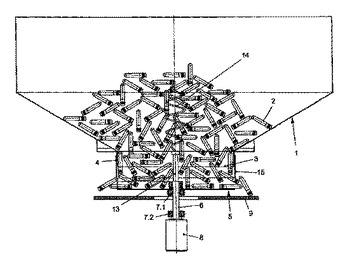 (もっと読む)
(もっと読む)
溶接工程に用いられるワーク搬送装置

【課題】次のワークを待機位置にて待機させておき、前のワークの溶接完了後、直ちに溶接作業位置へと送り出せるようにする。
【解決手段】2本の同心円状に配置された円環状トラック11、11’からなるものであって別個独立に回転駆動される二つのドリブン機構1、1’と、各ドリブン機構1、1’を形成する円環状トラック11、11’上に設置されるものであってワーク9の搭載されるパレット3、3’と、パレット3、3’の設置された各ドリブン機構1、1’を、それぞれ別個独立に駆動するものであって電動モータを主に形成される二つのドライブ機構2、2’と、各ドライブ機構2、2’の作動制御、各ドリブン機構1、1’を形成する円環状トラック11、11’上に設置されたパレット3、3’の各位置への位置決め及び各パレット3、3’の所定位置での傾動運動制御、及び溶接ロボット6の作動制御を行なう制御手段5と、からなる。
(もっと読む)
物品移載装置及び物品移載システム、物品移載方法

【課題】 レトルトパウチ、輸液バッグのような物品を熱処理する設備システムを簡略にし、設置スペースを縮小し、熱処理品質を向上させる物品移載装置、物品移載システム、物品移載方法を提供する。
【解決手段】 上下多段にトレイ20を定ストロークで出し入れ可能に収納したトレイ引出式の熱処理用筐体30と、筐体30から引き出されるトレイ20に対して熱処理済みの物品3bをトレイ20から搬出するアンローディングと、筐体30に入れ戻されるトレイ20に対して未熱処理の物品3aをローディングする、両機能を備えた物品移載装置F1を筐体30のトレイ出し入れ側に併設する。
(もっと読む)
少なくとも1つの貫通開口を備えるワークピースを取り扱う方法および機械アッセンブリ
少なくとも1つの貫通開口(3)を備えるワークピースを取り扱う方法の経過中、少なくとも1つのサッカ(5)とワークピースとは互いに当接させられ、サクションチャンバ(8)を形成する。該サクションチャンバ(8)内に負圧を発生させることにより、ワークピースとサッカ(5)とは、引き続いてのワークピースの操作のために保持力で互いに固定される。その際、負圧の発生後の貫通開口(3)を通したサクションチャンバ(8)への空気通流を減じるために、ワークピースの、サクションチャンバ(8)に開口する少なくとも1つの貫通開口(3)に、少なくとも部分的にカバーを設けることによって、ワークピースとサッカ(5)とを保持力で互いに固定する。ワークピースを取り扱う機械アッセンブリ(10)は、前記方法を実施するために役立つ。  (もっと読む)
(もっと読む)
ハンドリング装置
【課題】異なる部品を扱う上での柔軟性のレベルが高いハンドリング装置を提供する。
【解決手段】ハンドリング装置11は、キャリアユニット12を備える。キャリアユニット12は、ロボットアームに連結するための連結部13と、複数の作動モジュール14と、を備える。複数の作動モジュール14のそれぞれは、作動装置18を取り付けるための少なくとも1つの取付インターフェース17を備える。作動モジュールのそれぞれには、取付インターフェースの位置を設定するための調整手段が設けられる。調整手段は、制御装置からの電気的な制御信号によって制御される、複数の位置設定駆動部19、20,21を備える。複数の位置設定駆動部19、20、21は、x,y,z座標系を有するデカルト座標系におけるx方向、y方向およびz方向に取付インターフェースを移動できる。
(もっと読む)
平板状物品の搬送装置
【課題】
把持手段の平板状物品持ち替え時のロス時間発生をなくしてマシーンタクト低下を防止するとともに、平板状物品持ち替えによる位置ずれの発生を防止する。
【解決手段】
平板状物品のガイドレールと把持する複数の搬送ユニットとを備え、搬送ユニットが異なる平板状物品を把持して前進する搬送装置に次の手段を採用する。
第1に、搬送ユニットは、物品を把持する把持手段と、把持手段をガイドレールに沿って前進及び後退させる往復移動機構と、把持手段を物品の把持位置から待避させる退避機構とを有するものとする。
第2に、先行している一の搬送ユニットの把持手段が前進端まで移動すると、物品の把持を解除し、把持手段を退避機構により把持位置から退避するとともに、後続する把持した他の搬送ユニットの把持手段を追い越して後退し、新たな物品を把持して、先行している把持手段の末尾に後続するものとする。
(もっと読む)
製品仕分装置および仕分条件を演算するプログラム
【課題】素材板材からミクロジョイントレスの状態に加工されたすべての製品を端材とは別にして自動的に収納するとともに端材も自動的に別に収納する製品仕分装置、加工済板材から製品を仕分けする仕分条件を演算するプログラムを提供する。
【解決手段】製品仕分装置1は、製品を含む加工済板材11が載置される仕分テーブル12と、仕分テーブル12の上方に移動されたとき、加工済板材11に対向し、加工済板材11と平行な面内を直交する2軸方向に移動されるとともに対向する加工済板材11に一端部が当接するように移動される複数の製品引上部材を具備する搬送装置21と、製品が収納される製品収納台車13と、製品引上部材を予め定められた距離だけ面内で移動し、製品を予め定められた少なくとも3個の製品引上部材で引き上げてから製品収納台車13に搬送する制御装置24と、を備える。
(もっと読む)
ワーク搬送装置およびワーク搬送方法
【課題】 循環経路の所定の位置で搬送されるワークの有無確認を行うワークセンサの実質的な点検が自動で、かつ、頻繁的に行えるワーク搬送装置の提供。
【解決手段】 搬送体であるターンテーブル10の周辺部に等間隔で複数のヘッド11を配置し、ターンテーブル10を定方向に間欠回転させ、定位置からヘッド11にワーク1を供給し、ワーク搬送をして定位置でヘッド11からワーク1を搬出し、ヘッド11でのワーク有無をワークセンサで検出するワーク搬送装置で、ターンテーブル10の隣接するヘッド間にワーク1と同等のダミー物体2を設置して、ダミー物体2をワークセンサが検出するか否かでセンサ点検を行う。
(もっと読む)
ワーク搬送装置
【課題】省スペース化を図りつつ、複数のベルトコンベアによりそれぞれワーク処理装置に移載可能なように、ワークを搬送する。
【解決手段】それぞれがワーク処理装置2に向かってワークWを搬送する複数のベルトコンベア31を、上下方向に複数段に亘って配設したワーク搬送システム3であって、複数のベルトコンベア31の複数の搬送終端部は、ワークWを移載するための上方スペース22が確保されるように、階段状に配設されている。
(もっと読む)
ワークの移載装置および移載方法
【課題】温度変化による建屋架構の伸縮等によってガイドレールが位置ずれし、ガイドレールの位置ずれによってキャリヤの位置がワークをキャリヤに移載するマニピュレータに対して相対的にずれた場合でも、精度よく、かつ短時間にワークの移載をおこなうことのできるワークの移載装置および移載方法を提供する。
【解決手段】鉛直方向に延設する昇降ガイド部材1と、昇降ガイド部材1に昇降自在に装着されたロボットアーム2と、ワーク(ドアD)を支持する支持部材26と、支持部材26とキャリヤFとの離間を計測する計測装置とがロボットアーム2の先端に取付けられてなる移載装置10である。計測装置は、複数のリミットスイッチと、キャリヤまで伸長しながら該複数のリミットスイッチをそれぞれONまたはOFFさせることで離間を計測する計測部材とから構成されている。
(もっと読む)
容器の反転装置
【課題】回転体の周面ごとの収納スペースを形成することによって、容器の搬出速度との厳密な同期の必要性をなくするとともに、異形断面を含む多様な容器にも簡単に適合させ、多種少量生産にも対応可能な容器反転装置を提供する。
【解決手段】円板状の回転体10と、容器Wごとの収納スペースS、S…を回転体10の周面上に周方向に区分して形成するアタッチメント部材20、20…と、回転体10と同軸の螺旋状に形成する前後のガイド部材31、32とを設ける。
(もっと読む)
プラスチックボトル搬送装置
【課題】インラインボトル成形充填システムにおいて、成形直後のボトルをエア搬送路に受け渡す際にボトル同士が衝突して変形するのを防止する。
【解決手段】ブロー成形機からボトルを搬出するシステムは、回転式のボトル取り出し機によって各成形型から取り出されたボトル10がスターホイール18を介してネック式エア搬送路17に送り出される。ネック式エア搬送路17は、そのフレームFがスターホイール18と干渉しない位置に設置され、エア搬送路17の入口17aはフレームFからスターホイール18側に延長されて、上方から見たときにスターホイール18と干渉する位置までスターホイール18に接近して配置されている。
(もっと読む)
プラスチックボトル搬送装置
【課題】成形した直後のボトルをエア搬送路に受け渡す際にボトル同士が衝突して変形するのを防止する。
【解決手段】ブロー成形機1からボトルを搬出するシステムは、回転式のボトル取り出し機1によって各成形型2から取り出されたボトル10がスターホイール18を介してネック式エア搬送路17に送り出される。スターホイール18の凹所27には、その深部を規定する面29の進み側に窪み50が形成されている。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
ワーク搬送装置
【課題】 トランスファープレス等におけるワーク搬送装置において、ワーク把持装置を移動させるサーボモータの故障による運転停止の頻度を低減させるとともに、保守部品の保管・管理の負担を軽減することができる装置を提供する。
【解決手段】 所定のワーク1を把持するワーク把持部15と、ワーク把持部15にそれぞれ回転可能に接続された一対のアーム7,8と、各アーム7,8のそれぞれの他端に回転可能に接続されると共に往復直線移動する一対のスライダ4,5と、一対のスライダ4,5をそれぞれ駆動する一対の駆動部17,18と、を備えるワーク搬送装置101において、一対の駆動部17,18が、それぞれ複数のアクチュエータ31A,31B,32A,32Bにより構成される。
(もっと読む)
ワークの自動掛け降し方法、およびその方法を使用したワークの自動掛け降し装置
【課題】 従来手作業で行われていた表面処理装置などの中を移動するワーク移送用ハンガーへのワークの掛け作業及び処理完了後のワークの降し作業を、作業の省力化と効率向上、更にはワークの表面処理面の品質向上を目的として自動化するための方法、およびその方法を使用した装置を提供すること。
【解決手段】 密着整列された複数個のワークを、分離整列する工程と、分離整列した複数個のワークを、その分離整列状態のまま串状支持体Kで支持する工程と、分離整列状態のワークを支持した串状支持体KをハンガーHに掛ける工程とを含むこと。
(もっと読む)
搬送装置
【課題】 搬送装置の汎用性を向上することである。
【解決手段】 ワークWを搬送する搬送装置Tにおいて、ワークWを把持および釈放可能な把持手段Hを備えた伸縮動作可能なアームAと、アームAを水平に往復移動させるとともに移動方向へアームAを遥動させる移動手段Mとを備えたので、ワークWの上方に障害物がある場合にも搬送することが可能となり搬送装置Tの汎用性が向上する。
(もっと読む)
反転ユニット
【課題】 回転駆動用のモーターを1個として構造を簡素にし、かつ、ワークの反転を高速で行える反転ユニットの提供。
【解決手段】 ヘッド5とヘッドの回転機構3及び1個のカム部材4を備え、ヘッド5は、前端部に貫通したワーク配置孔14を有するワーク収納部材11とこれの上下両面にそれぞれ配置され、前後に移動してワーク配置孔14を開閉できるフィンガー12,13とを備え、回転機構3はモーター6により、ヘッド5を正転位置、反転位置とする構造であり、カム部材4は固定位置にあって、ヘッドの回転機構3によりワーク収納部材11の両面のフィンガー12,13を交互に前後移動させる。
(もっと読む)
帯状部材の搬送切断方法および装置
【課題】 省スペース化を図りながら、帯状部材12の切断角度Sの変更時における作業能率を向上させる。
【解決手段】 切断手段15による帯状部材12の切断角度Sが変更されると、変更された切断角度Sに応じて第3コンベア36によるシート片16の旋回角度を変更し、第2コンベア17にシート片16が常に所望の姿勢で搬送されるようにする。このように第3コンベア36によるシート片16の旋回角度を変更するだけで対処することができ、この結果、第2コンベア17を揺動させるための広い設置スペースが不要となって、省スペース化を図ることができるとともに、容易に作業能率を向上させることもできる。
(もっと読む)
ワーク把持回転装置
【課題】 ワーク反転の高速化と共に、小形軽量化が容易なワーク把持回転装置の提供。
【解決手段】 ワーク2を例えば略180°反転させるワーク把持回転装置で、略180°の定角度で正逆回転する回動部材10とこれの駆動手段のモータ12を備える。回動部材10の回転中心に対し等間隔の4箇所に設置した4本の第1回転軸20それぞれに1個の爪部材30を連結する。回動部材10の中心線に沿って配置した第2回転軸40を各第1回転軸20にギヤ連結する。モータ12で回動部材10を正逆回転させ、この回転の初期および終期にカム部材60を介し第2回転軸40を回動部材10に対して正逆回転させ、4本の第1回転軸20を同方向に正逆回転させて4本の爪部材30を開閉動させる。回動部材10の回転初期に4本の爪部材30が閉じてワーク2を掴み、そのまま回動部材10が回転してワーク2が反転し、回転終期に爪部材30が開く。
(もっと読む)
41 - 60 / 67
[ Back to top ]