
Fターム[3F204FD02]の内容
クレーンの細部(制御、安全) (2,955) | 作動制限対象 (137) | 巻上装置;昇降装置 (30)
Fターム[3F204FD02]に分類される特許
1 - 20 / 30
ウインチ監視装置
【課題】オペレータの意図に反したロープの繰り出しの防止に資するウインチ監視装置を提供する。
【解決手段】ブレーキモードが中立フリーモードに設定されておらず、かつ、巻き上げ操作レバー13が操作されていない場合に、巻き取りドラム3が回転していることが検出されると、警報信号を出力するように構成した。この警報信号を利用してスピーカ31から音声にて巻き取りドラム3が回転している旨の報知を行うように構成することで、ブレーキ切換弁5のスプール位置の切り換え不良のような不具合が生じて巻き上げ操作レバー13を操作していないにもかかわらず荷の自重によって巻き取りドラム3が回転してしまう場合であっても、その旨を報知する警報を発することできる。
(もっと読む)
クレーン

【課題】オペレータの操作ミスに起因するマストの曲げ変形などの発生を確実に防止し得るクレーンを提供する。
【解決手段】互いにガイラインを介して連結されたブーム及びマストと、フレーム上に起立した作業姿勢と後方に倒伏した収納姿勢とに変更可能に設けられたガントリと、起伏ロープの巻き取り又は繰り出しによりブーム及びマストを起伏回動させる起伏用ウインチと、マストをブーム代わりにして吊り作業を行う自力組立・分解時にマストの起伏角度が、ガントリの作業姿勢での頂部とマストの支点とマストの先端とが略一直線上に並ぶ所定角度になったときマストの巻上及び巻下を規制する制御手段53と、ガントリが作業姿勢にあることを検出する検出手段52とを備える。制御手段は、マストの巻上及び巻下を規制したとき、検出手段の信号に基づいてガントリが作業姿勢にあることを判断し、作業姿勢にあることを条件にマストの巻上を許可する。
(もっと読む)
ウインチの制御装置及び移動式クレーン
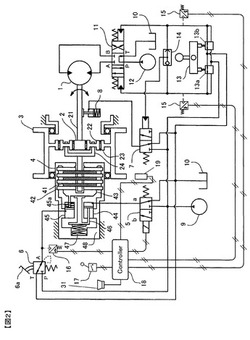
【課題】荷重と操作量の両方を考慮してウインチを制御することで、安全性と操作性を調和させたウインチの制御装置を提供する。
【解決手段】ウインチ48の回転速度を制御するウインチの制御装置2である。
そして、このウインチの制御装置2は、吊荷の荷重を検出する荷重検出手段5と、ウインチ48を低速モード又は高速モードで回転駆動する可変容量型ウインチモータ44と、可変容量型ウインチモータ44を操作するウインチ操作手段49と、吊荷の荷重及びウインチ操作手段49の操作量に基づいて可変容量型ウインチモータ44を低速モード又は高速モードに切換える制御部3と、を備えている。
(もっと読む)
天井クレーンの巻上駆動装置
【課題】複数台の電動機のうち一部が故障した場合非常運転を行える天井クレーンの巻上駆動装置を提供する。
【解決手段】レードルクレーンに備えている1台の巻上ドラム7に対して、複数台の高圧電動機6と、各複数台高圧電動機6に付設された同数台の高圧マトリクスコンバータ20からなる巻上駆動装置を備えており、高圧電動機6が、基底回転数以下の領域でトルクが一定値の定トルク領域と、基底回転数以上の領域であってトルクが回転数に反比例して低減する定出力領域とからなる特性を有するものであって、高圧マトリクスコンバータ20は、複数台の高圧電動機6で通常運転するときは、各高圧電動機6を定出力領域で運転させ、複数台より少ない台数の高圧電動機6で非常運転するときは、その高圧電動機6を基底回転数以上で通常運転の回転数より小さくかつ通常運転の半分でない回転数で運転させる。
(もっと読む)
鍛造クレーン及び鍛造クレーンの制御方法
【課題】インバータ制御によって電動機を回転駆動することで、装置全体の軽量化を図りつつ、急激に大きな荷重が作用した場合にも過負荷とならないように速やかに巻き下げ動作を実施することが可能な鍛造クレーン及び鍛造クレーンの制御方法を提供する。
【解決手段】鍛造クレーンは、ワイヤが巻回されたドラムと、ドラムを回転駆動する電動機35と、電動機35に出力する交流電流を制御するインバータ36と、ドラムの回転を制動する制動部4と、鍛造モード及び通常モードの2種類のモードに設定可能なモード切替部7と、インバータ36を制御する主制御部5とを備え、主制御部5が、モード切替部7で鍛造モードに設定された場合に、制動部4によりドラムの回転を制動させるとともに、インバータ36に予備励磁指令を出力して、予め設定された予備電圧をインバータ36によって電動機35に印加させる。
(もっと読む)
クレーンの異常検出装置
【課題】接続コネクタを用いたカウンタウェイト重量の検出手法を採用したクレーンにおいて、検出異常の有無を自動的にチエックし確認するのに有効な技術を提案する。
【解決手段】コネクタ接続状態検出手段1からの信号を受けて各分割ウェイト31〜33の合計重量を検出重量として取得する検出重量取得手段を備えたクレーンZにおいて、搭載されたカウンタウェイト30の重量が反映された物理量を取得し該物理量に基づいて上記カウンタウェイト30の重量を演算重量として取得する演算重量取得手段を備え、検出重量と演算重量を対比することで、コネクタ接続状態検出手段1の異常判定を行なうように構成しているので、コネクタ接続状態検出手段1の異常判定が自動的に行なわれ、クレーンの作業上の安全性が向上する。
(もっと読む)
リフト装置及びシステム
リフト・システム用リフト装置を開示する。本装置には、a)吊り上げ力を供給するためのモーター、b)積載装置をモーターに接続するべく、モーターに動作可能に接続された少なくとも一つのコネクタc)積載装置に関する負荷限界情報を受信する情報受信機、d)モーターおよび情報受信機に電気的に接続されたモーター・コントローラであって、情報受信機により受信された負荷限界情報に基づき、モーターの吊り上げ力を制限するモーター・コントローラ、が含まれる。 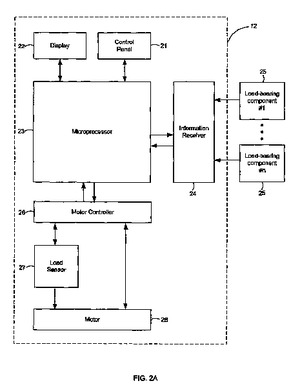 (もっと読む)
(もっと読む)
クレーン装置の制御方法
【課題】いわゆるダブルフック型の天井走行クレーン装置を用いて吊荷を傾斜させたときの落下事故を防止することが可能な制御方法を提供する。
【解決手段】本発明は、クレーン本体1と、クレーン本体に載置された一対の台車2A,2Bと、各台車にそれぞれ取り付けられた一対のフック3A,3Bとを備え、各フックが互いに連動して昇降可能な第1の状態と、前記各フックが独立して昇降可能な第2の状態とを切り替え可能とされたクレーン装置100を制御する方法である。本発明は、一対のフック間距離と各フックの高さとを検出するステップと、検出した一対のフック間距離及び各フックの高さに基づいて、一対のフックで吊持する吊荷の傾斜角度を算出するステップと、算出した吊荷の傾斜角度が、予め設定した吊荷の安定限界角度に到達した場合には、各フックの昇降動作を強制的に停止させるステップとを含む。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
作業機の操作装置
【課題】十字型のジョイスティックを用いた操作装置において、容易且つ的確な複合操作を可能とし、安全性及び信頼性の高い作業を実現し得る作業機の操作装置を提供する。
【解決手段】十字型のジョイスティックを備えた作業機の操作装置において、上記ジョイスティックの可動範囲内に、該ジョイスティックの操作を固定できる操作固定位置を設定し、該操作固定位置への上記ジョイスティックの操作固定状態において作業機に対する特定の操作が実行されるように構成する。係る構成によれば、上記操作固定位置に上記ジョイスティックを固定することで、上記特定の操作を的確に且つ安定的に実行することができ、作業の安全性及び信頼性が向上する。
(もっと読む)
過負荷防止装置及び鍛造クレーンの過負荷防止方法、並びに、鍛造クレーン。
【課題】鍛造を行うワークを吊下げる際に、鍛造に伴ってワークから作用する荷重が過負荷となり、また、ロープがたるみ過ぎないように、ロープの張力が適切となるように調整してワークを吊下げることを可能とする鍛造クレーンの過負荷防止装置及び過負荷防止方法、並びに鍛造クレーンを提供するものである。
【解決手段】ワークWから作用する負荷が予め設定された許容範囲内となるように、吊下げ手段20によって保持部30を介してワークWを吊下げる際に変化する吊下げ特性値の大きさを制限する。
(もっと読む)
ブームを有する作業機の安全装置
【課題】伸縮ブーム4を支持する起伏シリンダ5支持力を検出する支持力検出手段9が正常に検出しているか否かを判別するために、伸縮ブームをブームレスト6に載せた状態で伸縮ブームを倒伏させるよう前記起伏シリンダを作動させて起伏シリンダの油圧回路に配置したリリーフ弁をリリーフ圧にまで作動させ、前記支持力検出手段で検出される出力値が予め設定した基準値に基づく所定範囲内であるか否かにより判別手段S9で判別する際に、油温によりリリーフ圧が変化しても判別できる伸縮ブームを有する作業機の安全装置を提供する。
【解決手段】
前記リリーフ弁のリリーフ圧を検出するリリーフ圧検出手段19を設け、リリーフ圧検出手段で検出される圧力により前記前記支持力検出手段で検出される出力値あるいは前記基準値を補正する補正手段S8を備えたもの。
(もっと読む)
クレーンのドラムのロード状況表示装置
【課題】 各ドラムのオンロード、アンロード状況を容易に判断できるようにする。
【解決手段】 クローラクレーンに、クレーンのイラスト48と共にブーム起伏用ドラム画像48a、ジブ俯仰用ドラム画像48b、主巻ドラム画像48c、補巻きドラム画像48dを画面47aに表示できる画像表示装置47と、表示処理装置49を備える。クローラクレーンのブーム起伏用ドラム7、ジブ俯仰用ドラム8、主巻ドラム9、補巻ドラム10が安全装置の作動により自動停止されるときに、自動停止の原因がリセット可能な場合は、表示処理装置49により、画像表示装置47の画面47a上における対応するドラム画像48a,48b,48c,48dの表示色を緑色から黄色に変化させ、リセット不可の原因の場合は、対応するドラム画像48a,48b,48c,48dの表示色を赤色に変化させる。
(もっと読む)
クレーンの安全装置作動状況表示装置
【課題】 各リミットスイッチの作動状態を容易に且つ的確に判断できるようにする。
【解決手段】 クローラクレーンのブーム、ジブ、ブームフック、ジブフックにそれぞれ対応させて設けた過巻第一リミットスイッチと、過巻第二リミットスイッチの作動状態に応じて、画像表示装置11の画面11a上に表示してあるクレーンのイラスト12におけるブーム画像12a、ジブ画像12b、ブームフック画像12c,ジブフック画像12dについての表示色を、通常時の緑色より、黄色、赤色に順次変更させる。
(もっと読む)
トラック搭載型クレーンの安全装置
【課題】トラック搭載型クレーンの安全装置では、アウトリガの支持力を支持力検出手段13で検出し支持力が予め設定した安定支持限界性能以下になる安定限界を監視する安定支持限界監視制御手段15と、伸縮ブームに作用する負荷がクレーンの構造物の強度によって定まる強度限界を監視する負荷限界監視制御手段14とを備えているが、支持力検出手段が故障した場合に対応できる安全装置を提供する。
【解決手段】トラックの荷台に荷物を積載しない状態でのクレーン作業時の安定度から決定される空車時安定限界性能を設け、ブームに作用する負荷がこの空車時安定限界性能に達するか否かを監視する空車時安定限界監視制御手段16と、前記支持力検出手段13の故障を判別する支持力検出故障判別手段17とを配置し、支持力検出故障判別手段が故障を判別すると負荷限界監視制御手段と空車時安定限界監視制御手段による制御で対応する。
(もっと読む)
クレーン吊具給電用電動ケーブルリールの制御装置及び制御方法
【課題】電動ケーブルリールの停止中に、吊具の振れや巻き下げ動作等により吊具の支持力が給電ケーブルに掛かることを未然に防ぐことにより、給電ケーブルと電動ケーブルリールの損傷を防止するようにしたクレーン吊具給電用電動ケーブルリールの制御方法を提供すること。
【解決手段】電動ケーブルリールBの停止信号により、巻上装置Dによるクレーンの巻き下げ動作のみを禁止し、電動ケーブルリールBの停止時でもクレーンの巻き上げを可能とする。
(もっと読む)
巻上機の荷重落下防止方法、及び運転制御装置
【課題】巻上下用の電動機(誘導電動機)の脱調兆候を検出して、落下を未然に防止することができる巻上機の荷重落下防止方法、及び荷重の落下防止手段を備えた巻上機の運転制御装置を提供する。
【解決手段】巻上下用の電動機6、インバータ4、インバータ制御部を備え、操作ボックス2の操作指令によりインバータ制御部でインバータ4を制御して電動機6の上昇運転及び下降運転を行う巻上機の運転制御装置であって、電動機6の脱調兆候を検出する脱調兆候検出手段を備え、インバータ制御部は、脱調兆候検出手段が脱調兆候を検出したら、電磁ブレーキ7を作動させると共に、インバータ4から電動機6に供給する電力を遮断する。電動機6はベクトル制御されており、トルク発生電流成分又は1次電流を監視し脱調兆候を検出する。
(もっと読む)
クレーン制御システム装置
【課題】 中抜き、中落し時に吊具もしくは吊具に保持されたコンテナと既存に積まれているコンテナとの衝突を防止または回避することができるクレーン制御システム装置を提供する。
【解決手段】 トロリーに設置されるものであって、あるコンテナの積み上げ/積み下ろしする位置に隣接する他のコンテナと前記あるコンテナとの空隙の中心の鉛直上方に配置された複数個の検出器(20A,20B)と、前記検出器が走査し検出する前記空隙方向の距離を演算し、前記あるコンテナと前記他のコンテナとの衝突を前記距離と規定値との比較に基づいて判断する第1の演算処理部(30)と、前記演算処理部(30)において衝突が判断された場合、クレーンの巻上または巻下速度を制限する第2の演算処理部(31)と、を備えた。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
天井クレーン誤操作防止装置
【課題】運転者に光や音で天井クレーンの動作状態を知らせることにより誤操作を防止する。
【解決手段】制御器の操作ハンドルのノッチ位置が天井クレーンの作動/停止状態を検出する検出手段と検出手段の検出結果を光及び/又は音で報知する報知手段を有し、検出手段は、天井クレーンを初期の位置から巻上げ・走行・横行作動させる電動モータ13と天井クレーンを巻上げ・走行・横行作動によって所定の位置に達したときに停止させる電磁ブレーキ14といづれか一方の負荷電流を検出する電流検出器21とにより構成し、報知手段は、電流検出器と一体構成されたモータリレー22の動作により接点信号を出力する補助リレ32ーと補助リレーの接点信号33により導通する表示灯34及び/又は報知器35とにより構成する。
(もっと読む)
1 - 20 / 30
[ Back to top ]