
Fターム[3G093DB18]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 道路状態 (758)
Fターム[3G093DB18]に分類される特許
1 - 20 / 758
機械式自動変速装置の変速制御機構
【課題】車両の外的要因である路面勾配や車両総重量を考慮した制御を行ない、登坂時の失速や平坦路における燃費の悪化を防止することが出来る機械式自動変速装置の変速制御機構の提供。
【解決手段】燃料噴射量検出手段(2)と、燃料噴射制御装置(1)と、車両総重量検出手段(3)と、路面勾配検出手段(4)と、コントロールユニット(10)を備え、前記燃料噴射量検出手段(2)は燃料噴射量の時間特性(傾きG)を演算する機能を有しており、前記コントロールユニット(10)は、路面勾配と燃料噴射量目標値の特性から第1の燃料噴射量目標値(目標燃料噴射量A)を求める機能と、車両総重量と燃料噴射量目標値の特性から第2の燃料噴射量目標値(目標燃料噴射量B)を求める機能とを有している。
(もっと読む)
車両制御装置

【課題】アイドリングストップ機能が作動した場合でも、エンジン始動のために煩雑な操作が必要とされない車両制御装置の提供。
【解決手段】機械式自動変速機と、車両が停止した際にエンジンを停止するアイドリングストップ装置(1)と、道路の勾配を検出する勾配検出装置(2)と、コントロールユニット(10)を含み、当該コントロールユニット(10)は、勾配検出装置(2)により検出された勾配がしきい値以上であり且つアイドリングストップ装置(1)の作動が要請された場合に、クラッチを切り且つ検出された勾配に適したギヤを選択する機能を有していることを特徴としている。
(もっと読む)
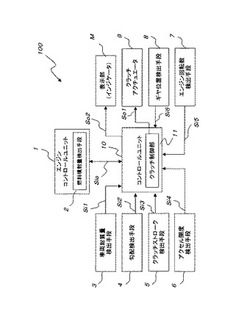
ハイブリッド車両
【課題】段差を乗り越えるときに、ドライバに違和感を与えるのを抑制することが可能なハイブリッド車両を提供する。
【解決手段】ハイブリッド車両100は、駆動輪8を駆動するためのエンジン1およびモータMG2と、エンジン1およびモータMG2を制御するHVECU11とを備える。そして、HVECU11は、エンジン1の間欠運転時において段差を乗り越えるときにエンジン1の始動を禁止するように構成されている。
(もっと読む)
評価表示システム、方法およびプログラム
【課題】今回の走行区間における走行効率の評価と過去の走行効率の評価とを運転中に容易に比較することが可能な技術の提供。
【解決手段】表示部に車両の現在位置とともに当該現在位置の周辺の地図を表示し、車両の今回の走行における単位区間毎の走行効率と達成目標とを比較した結果を今回効率評価として取得し、今回の走行よりも過去の走行における単位区間毎の走行効率と達成目標とを比較した結果を過去効率評価として取得し、地図上に単位区間毎の今回効率評価と過去効率評価とを併せて表示する。また、今回効率評価が過去効率評価よりも改善した場合、達成目標をより高い目標に修正する。
(もっと読む)
走行制御装置、及び移動体の走行制御方法
【課題】走行制限が解除された際の急加速を防止した安全な運転を行うこと
【解決手段】車両1は、アンテナ2を介して走行制限信号を受信する。走行制限信号は、走行制限エリアでの移動体の制限速度を含む。走行制御ECU5は、走行制限エリアでの車両速度を制限速度以下となるように制御する。走行制御ECU5は、アンテナ2を介して走行制限エリアでの走行制限の解除を指示する走行制限解除信号を受信する。走行制御ECU5は、当該受信の際に制限速度を超える加速操作を運転者が行っていた場合、車両1の停止制御を行う。
(もっと読む)
ハイブリッド車両のパワーステアリング装置
【課題】ハイブリッド車両の良好な燃費性能を確保しつつ、大きな要求操舵トルクにも要求可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】本発明に係るハイブリッド車両(1)のパワーステアリング装置(20)は、モータ回生走行時にエンジン(2)が停止状態にあり、且つ、クラッチ(3)が切断状態にある場合、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されないとき、増幅手段(24)の駆動源として電動モータ(25)を選択し、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されたとき、エンジン(2)を始動して、増幅手段(24)の駆動源としてエンジン(2)を選択することを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】電動機の押し当てトルクにより動力伝達系での歯打ち音の発生を防止するハイブリッド車両において、内燃機関の運転状態が切り換えられる際における歯打ち音の発生を防止する。
【解決手段】ハイブリッド車両において、エンジンが冷間状態にある場合には、エンジンの運転状態が負荷運転と自立運転との間で切り換わったとしても押し当てトルクの作用方向を一方向に固定する。また、その際の押し当てトルクの大きさを、エンジンが温間状態にある場合の押し当てトルクよりも大きく設定する。シフト操作装置がPポジションから非Pポジションへ操作された場合、押し当てトルクが所定値に低下するまでは押し当てトルクの単位時間当たりの減少量を大きく設定し、パーキングギヤの歯の側面がパーキングロックポールに強圧されている状態を早期に解消する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両用走行支援装置
【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
(もっと読む)
車両走行制御装置、および、車両走行制御方法
【課題】ACC機能によって車両の制御を行う場合において、不要な加速を抑制する技術を提供する。
【解決手段】ACCによって車両の走行を制御する車両走行制御装置100であって、自車両の走行速度を取得する車速取得手段と、取得した走行速度が所定の設定速度より低い場合には、自車両を当該設定速度まで加速させる車速制御手段と、を備え、車速制御手段は、自車両の周囲状況を特定し、当該周囲状況が所定の条件を満たしている場合には、自車両を加速させない。
(もっと読む)
自動省燃費運転システム
【課題】道路勾配を有する自動車道路において、精度の高い道路勾配データを作り込みながら、道路勾配に応じた最適な自動省燃費運転制御を行うような車両の省燃費運転制御システム及び制御方法の提供。
【解決手段】自車位置検出手段1と、エンジン制御手段2と、補助ブレーキ制御手段3と、車両速度検出手段4と、補助ブレーキ作動確認手段5と、記憶手段8と、自動省燃費運転制御手段10とを有し、自動省燃費運転制御手段10は、道路情報が無い道路を走行する場合は、補助ブレーキの作動状態によって走行中の道路を下り坂の領域L1と、下り坂手前の領域Lxと、下り坂と下り坂手前の領域の何れでもない領域L2とに識別し、記憶手段8に記憶する。
(もっと読む)
自動二輪車
【課題】部品点数を低減しながら、アイドル停止とアイドル許可とを適切に行うことができる自動二輪車を提供する。
【解決手段】アイドル制御用スイッチ84が有する単一の操作子84Sが操作された場合に(ステップS11)、エンジン12Aの運転状態を判定し(ステップS12)、エンジン12Aが運転中であればエンジン12Aを停止させ(ステップS14)、エンジン12Aが停止中であればエンジン12Aを始動させるようにした(ステップS22〜S25)。
(もっと読む)
車両制御装置
【課題】路面が勾配を有している場合であっても車両の後退を的確に抑制しつつ車両の減速中における内燃機関の自動停止の頻度を確保する上で有利な車両制御装置を提供する。
【解決手段】自動停止制御手段22Cは、車両の停車状態で停車中停止条件が成立した場合、または、車両の減速状態で減速中停止条件が成立した場合に、エンジン10の自動停止処理を実施する。自動再始動制御手段22Dは、停止中自動停止制御手段22Bによるエンジン10の自動停止中に再始動条件が成立するとエンジン10の自動再始動処理を実施する。傾斜センサ38は、車両の前後方向における傾きを示す傾斜値θを検出する。強制再始動手段22Eは、車両の減速状態において、自動停止処理の実施に続いて車両が停車状態あるいは停車直前の低速状態になった時点で傾斜値θが減速時判定傾斜値θcより大きい場合、強制的にエンジン10の自動再始動処理を実施する。
(もっと読む)
ハイブリッド式ショベルの制御方法
【課題】作業要素の初動時の操作性を向上させるハイブリッド式ショベルの制御方法を提供すること。
【解決手段】本発明の実施例に係るハイブリッド式ショベルの制御方法は、レバー信号とエンジン出力状態とに基づいて、通常時のエンジン回転数制御指令と通常時よりも高い初動時のエンジン回転数制御指令とを切り換える。初動時のエンジン回転数制御指令は、レバー信号と傾転角とに対応するエンジン回転数を含む。アシストモータ12は、初動時のエンジン回転数制御指令に基づいてエンジン11をアシストする。
(もっと読む)
車両のエンジン停止制御装置
【課題】車両のエンジン停止制御装置において、車両が駐車場に存在していることを正確に判定して、その場合の車両の停止時又は減速時におけるエンジンの自動停止を禁止することを可能とすることにある。
【解決手段】制御手段(5)は、車両(1)が走行路上に存在していないことを検出した時に、車速とGPS情報の受信状況と車両の傾斜状況と車両の右左折回数又は停止発進回数とから車両(1)が駐車場に存在していると判定して、車両(1)の停止又は減速時のエンジン(2)の自動停止実施を禁止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン出力トルクの余剰トルクで電動機の発電を行う際に、燃費の向上を図りつつドライバビリティの低下を抑制するハイブリッド車両の制御装置を提供する。
【解決手段】要求トルクに対するエンジン出力トルクの余剰トルクを用いて電動機MGによる充電を行う制御において、自動変速機18の変速比γが大きいほどその電動機MGによる充電量の制限値が小さい値とされることから、要求トルクとエンジン出力トルクとの誤差が加速度に影響を与え易い、自動変速機18の変速比γが比較的大きい駆動状態においては充電量の制限値を小さくして違和感の発生を抑制できると共に、変速比γが比較的小さい駆動状態においては最大限燃費の向上を実現できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンとモータを走行用動力源として有するハイブリッド車両において、簡素的な制御ロジックを用いて車両姿勢安定制御とスリップ率制御とを両立させる。
【解決手段】本発明に係るハイブリッド車両(1)の制御装置(14)は、車両姿勢を安定化する車両姿勢安定制御を実施する車両姿勢安定制御手段と、モータ(3)に駆動トルク又は回生トルクを付与してスリップ率制御を実施するスリップ率制御手段と、車両姿勢安定制御の実施時にモータの出力トルクを第1のモータトルクT1以下に制限し、車両姿勢安定制御の実施中に更にスリップ率制御を実施する場合、モータの出力トルクの制限を第2のモータトルクT2に変更するモータトルク制御手段とを備えたことを特徴とする。
(もっと読む)
車両および車両の制御方法
【課題】ユーザが所望するEV走行を確保することが可能な車両および車両の制御方法を提供する。
【解決手段】車両100は、蓄電装置10に蓄えられた電力をエネルギー源として走行するEV走行モードと、電力および燃料をエネルギー源として走行するHV走行モードとを備える。制御装置100は、ナビゲーションシステム40において設定された目的地までの走行区間をEV走行モードで走行したときの電気系の駆動機器の温度を推定するとともに、当該走行区間をHV走行モードで走行したときの駆動機器の温度を推定する。そして、制御装置100は、EV走行モードおよびHV走行モードにそれぞれ対応付けられた2つの駆動機器の温度の推定値を比較した結果に基づいて、EV走行モードおよびHV走行モードのいずれか一方を、当該走行区間を走行するための走行モードに選択する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】トラクション制御中における駆動電力の応答性を高める。
【解決手段】エンジン3に駆動される発電機5と、車両を駆動する駆動モータ11とを備える、ハイブリッド車両の発電制御装置において、車輪13のスリップに応じたモータトルク指令値制御を検出するトラクション制御検出手段1と、前記トルク指令値に応じた目標駆動電力から、発電電力を演算する要求発電電力演算手段1と、要求発電電力のための、発電機回転速度指令値とエンジントルク指令値からなる運転点又は発電機トルク指令値とエンジン回転速度指令値からなる運転点を演算する運転点演算手段1と、運転点から発電機及びエンジンを制御する制御手段1と、実際の発電電力とモータの実際の駆動電力が一致するようにトルクを制御する駆動モータ制御手段1,2,4と、を有し、トラクション制御中に、燃費を優先した運転点に代えて、発電機の回転速度変化量が所定値以下である運転点に設定する。
(もっと読む)
車両の制御装置
【課題】複数のアクセルセンサの一部に異常が生じたときのフェールセーフ機能をより適正なものとする。
【解決手段】二つのアクセルセンサの一方に異常が生じたときには、正常なセンサ値をユーザー開度Auとして設定し、ユーザー開度Auがアクセル開度Acc以上のときには、レート値Art2を用いたレートリミット処理により制御開度Anを設定すると共に(S150)、車速Vが大きいほど且つ路面勾配θが大きいほど大きくなる傾向に上限開度Alimを設定し(S160)、上限開度Alimと制御開度Anのうち小さい方を新たなアクセル開度Accとして設定する(S170)。これにより、アクセル開度Accを車速Vや路面勾配θに応じたものとし、二つのアクセルセンサの一方に異常が生じたときのフェールセーフ機能をより適正なものとすることができる。
(もっと読む)
1 - 20 / 758
[ Back to top ]