
Fターム[3G384FA80]の内容
内燃機関の複合的制御 (199,785) | 入力パラメータ、センサ (66,899) | 車両加速度 (186)
Fターム[3G384FA80]に分類される特許
1 - 20 / 186
燃料残量判定装置
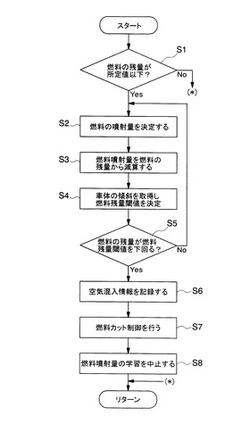
【課題】故障等に起因して失火が発生した場合と同様の現象が発生した際に、その原因の解明を迅速に行うことができるようにする。
【解決手段】燃料の残量が所定値以下であることを検出する燃料残量検出要素たる液位センサと、車体の姿勢を検出する車体姿勢検出要素たる加速度センサと、前記液位センサにより燃料の残量が所定値以下であることを検出された際に燃料の噴射量に基づき燃料の残量を演算し、前記車体姿勢検出要素が検出した車体の姿勢に対応する燃料残量閾値を演算し、燃料系の異常を検知すべく演算された燃料の残量が前記燃料残量閾値を下回るか否かの判定を行う制御装置とを備えていることを特徴とする燃料残量判定装置を備える。
(もっと読む)
車両の制御装置

【課題】燃費の悪化を抑制しつつ、内燃機関の疲労強度の低下を抑制する。
【解決手段】ECU7は、エンジン1の疲労強度が低下しているか否かを判定する疲労判定部75と、疲労判定部75によってエンジン1の疲労強度が低下していると判定された場合に、エンジン1における点火時期を遅角する遅角実行部76と、冷却水の温度TWが、予め設定された温度閾値TW0以下である場合に、エンジン1を経由して循環する冷却水の流量を制限する流量制御部78と、を備え、流量制御部78は、遅角実行部76によって点火時期が遅角されたときに、温度閾値TW0を高い値に変更する。
(もっと読む)
燃料劣化推定装置
【課題】燃料タンク内の燃料劣化の推定精度を向上可能な燃料劣化推定装置を提供すること。
【解決手段】燃料タンク14と、燃料タンク14から燃料が供給されるエンジン1と、記燃料の消費に関するデータを検出する燃料レベルセンサ27a 、圧力センサ27b、燃料温度センサ27cと、燃料残量と燃料タンク14の容量とに基づいて燃料タンク14内の空気量を求め、この空気量と燃料残量との比率に基づいて燃料の劣化状態を推定するコントローラ31と、を備えていることを特徴とする燃料劣化推定装置とした。
(もっと読む)
省エネ評価装置、省エネ評価方法
【課題】運転者の所望のタイミングで省エネ運転に対する評価を出力させることができる省エネ評価装置及び省エネ評価方法を提供すること。
【解決手段】車両の走行状況を検出して、省エネルギーに有効な運転操作に誘導するアドバイスを出力する省エネ評価装置100において、運転者が操作する操作スイッチ15と、前記操作スイッチの操作が検出されたことを契機に、前記走行状況に基づき省エネ運転の評価値を算出する評価値算出手段33と、算出された前記評価値に対応したアドバイスを表示装置16に表示するか又はスピーカ17から出力するアドバイス出力手段と、を有し、所定の周期毎に検出された前記走行状況のうち、前記評価値算出手段は、前記操作スイッチの操作が検出された時から所定時間前までの、複数の前記走行状況に基づき省エネ運転の前記評価値を算出する、ことを特徴とする。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
内燃機関の制御目標値設定方法及び内燃機関の制御装置
【課題】内燃機関の運転状態変化に対して最適化された制御目標値を設定可能とする内燃機関の制御目標値設定方法、及び、その制御目標値設定方法に従って設定された制御目標値を利用して内燃機関の制御を行う制御装置を提供する。
【解決手段】車両走行モードでのシミュレーションにおいて、総要求出力Pv(t)から定常要求出力Pc(t)を減算することで加減速要求出力Pt(t)を求め、この加減速要求出力Pt(t)を利用して走行加減速状態指標St(t)を算出し、それに従った加減速排気変化係数Ctdを求める。車両走行モードでの全走行期間を対象とした基本平均排気目標値Eet(t)に対して加減速排気変化係数Ctdによる補正を行ってNOx排出量目標値Eeti(t)を算出し、この値を、対象とする運転動作点での定常動作点排気目標値Eetmap(Ne,Tqe)として設定する。
(もっと読む)
重機のアイドリング判定方法、及び、アイドリング判定システム
【課題】重機がアイドリング状態であるか否かを示す客観的なデータを取得する。
【解決手段】携帯電話機3はダンプトラック2の運転席に設置される。携帯電話機3の加速度測定部36(3軸加速度センサ)でダンプトラック2の3軸方向の加速度を測定し、加速度測定情報生成部30aで3軸方向の加速度を合成して、合成加速度の時系列データを得る。この時系列データは、携帯電話機3からメモリーカード40を介して動作判定装置4に伝達される。動作判定装置4のばらつき算出部42aは、合成加速度の時系列データに基づいて合成加速度の標準偏差を算出する。動作判定部42bは合成加速度の標準偏差に基づいてダンプトラック2の動作状況を判定する。上記時系列に従い、合成加速度の標準偏差の算出とダンプトラック2の動作状況の判定とを繰り返すことで、合成加速度の標準偏差の時系列データとダンプトラック2の動作状況の時系列データとを取得する。
(もっと読む)
省燃費運転評価システム及び省燃費運転評価システム用プログラム
【課題】 登り坂と下り坂とが波状的に繰り返す道路であっても、省燃費運転に適した運転であるか否かを適切に評価可能とする。
【解決手段】 車両を走行させるための駆動力をエンジンが発生している「駆動状態」において、車両の運動エネルギー変化率から重力による車両の運動エネルギー増加率を減じた値に応じて変化するパラメータΔEを検出し、このパラメータΔEと予めROMに記憶され得いる評価用パラメータとを比較して評価を決定する。
(もっと読む)
車両の制御装置
【課題】燃料ポンプの作動を停止する制御装置の誤動作の可能性を低減し、信頼性を向上させることができる車両の制御装置を提供する。
【解決手段】車両1の制御装置は、車両1の加速度を検出する加速度センサ30,32と、加速度センサ30,32により検出された加速度に基づいてエアバッグ装置26,28を作動させるエアバッグ制御手段34と、燃料ポンプ4の作動を制御する燃料ポンプ制御手段36と、を備え、燃料ポンプ制御手段36は、エアバッグ装置26,28の作動に対して遅らせた時点での加速度に基づいて、燃料ポンプ4の作動を停止するように構成される。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】燃費の向上と、操縦安定性および乗り心地性能との両立を図る。
【解決手段】推定した車体のバネ上挙動を構成する成分のうち、ピッチ変動成分の抑制度合いを他の成分の抑制度合いよりも高く設定した燃費向上モードと、車体のバネ上挙動を構成する成分を燃費向上モードと異なる抑制度合いで抑制するように設定した他のモードとに基づいて、車両の走行状況に対応する制駆動力の補正トルクを算出する補正トルク算出手段と、車両の走行状況に基づいて、燃費向上モードと他のモードとの少なくとも一方の重み係数を算出する重み係数算出手段と、燃費向上モードおよび他のモードの各補正トルクを、燃費向上モードと他のモードとの重みに応じて加算し、運転者の制駆動操作により定めた要求制駆動トルクに対する補正トルクの指令値を算出するトルク指令値算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
省燃費運転評価システム及び省燃費運転評価システム用プログラム
【課題】 省燃費運転に適した運転であるか否かを適切に評価可能とする。
【解決手段】 車両の走行状態が、(a)停車又は低速走行状態、(b)発進走行状態、及び(c)定常走行状態のうちいずれの状態であるかを判定した上で、車両の運動エネルギー変化率に応じて変化するパラメータEs、Enを検出し、発進走行状態及び定常走行状態毎に記憶されている評価用パラメータとパラメータEs、Enとを比較して評価を決定する。これにより走行状態に応じて省燃費運転に適した運転であるか否かを評価することができるので、適切に評価が可能となり得る。
(もっと読む)
省燃費運転評価システム及び省燃費運転評価システム用プログラム
【課題】 省燃費運転に適した減速運転であるか否かを適切に評価可能とする。
【解決手段】 平均減速度D=[(Vo2−V12)/2/Ld]−[g・Hd/Ld]と定義され、この平均減速度Dは、減速期間に減少した車両の運動エネルギー、減速期間内に高低差がある区間を走行したことに起因する車両の「運動エネルギー変化量」、及び減速期間内に実際に車両が走行した距離に基づいて決定される。したがって、高低差がある区間を減速走行した場合であっても、これを反映させた評価指標にて減速運転を評価できるので、より適切な評価が可能となる。さらに、高低差による車両の位置エネルギーの変化量を走行状態に応じて補正して「運動エネルギー変化量」と相関関係を有する高低差Hdを算出するので、適切な評価が可能となる。
(もっと読む)
車両の駆動力制御装置
【課題】多くの工数を費やすことなく、再加速時に生じる駆動系の捩れ振動を容易にかつ適切に抑制できる車両の駆動力制御装置を提供する。
【解決手段】駆動力源の出力トルクを動力伝達軸を有する動力伝達機構を介して車輪に伝達する車両の駆動力制御装置において、惰力走行中もしくは減速走行中の前記車両を加速要求に応じて加速させる場合に、前記加速要求により増大される前記出力トルクが前記動力伝達軸に伝達され、その際に生じる前記動力伝達軸の捩れに起因して前記車両の前後加速度が変動することにより発生する振動の振動周期を算出し、その算出された振動周期を基に前記振動の振幅方向の極大値と極小値との差分が小さくなるように、前記加速要求により増大される前記出力トルクを制御するトルク制御手段(ステップS3,S5,S6,S13,S14,S17,S18,S20)を設ける。
(もっと読む)
運動効率判定装置
【課題】EV車両、HEV車両、又はPHEV車両において車両の運動効率を的確に判定する運動効率判定装置を提供する。
【解決手段】EV車両、HEV車両、及びPHEV車両におけるEV走行時の単位距離当たりのエネルギ消費量であるエネルギ消費率Ecj[kJ/m]を、運動エネルギEiの増減、位置エネルギEpの増減の他、電気エネルギEbの増減をも考慮して算出するようにしたので、EV車両、HEV車両又はPHEV車両のEV走行時においても車両の運動効率を的確に判定することができる。
(もっと読む)
車両用走行制御装置
【課題】燃費性能を向上させること。
【解決手段】動力源としてのエンジン10と当該エンジン10の動力を駆動輪WL,WRに伝える動力伝達装置とを備えた車両の走行状態を制御する車両用走行制御装置において、自車の所定距離先までの間の走行路の勾配を把握し、その所定距離先でも自車が加速を続ける可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が可能な状態のまま当該エンジン10への燃料の供給量を減少させ又は当該燃料の供給を停止させた惰性走行を行い、自車が前記所定距離先を超えるまでに減速し始める可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が断たれるように動力伝達装置の動力断接部(ロックアップクラッチ35と入力クラッチC1の内の少なくとも1つ)を制御して前記惰性走行を行うこと。
(もっと読む)
筒内噴射式ガソリン機関の制御装置
【課題】筒内噴射式ガソリン機関において、筒内の混合気が過濃(リッチ)状態になりやすい加速運転時にも、燃費悪化を最小限に抑えつつPM排出量を抑制する。
【解決手段】筒内噴射式ガソリン機関において、加速運転時に、排気閉弁時期を早期化することにより内部EGRを増量するとともに燃料噴射圧力を上昇する。その際、燃料噴射圧力の上昇幅を現在の排気閉弁時期に基づいて決定する。
(もっと読む)
車両の制御装置及び制御方法
【課題】エンジンの自動停止、自動再始動を行う車両において、燃料節減に寄与しえないエンジンの不要な停止を極力回避しつつ、登坂路での停車時における車両のずり下がりを好適に防止することができる車両の制御装置及び制御方法を提供する。
【解決手段】エンジン停止前の減速走行中に、エンジンを停止できるエンジン停止可能予想時間Tesを演算し(S12)、エンジン停止可能予想時間Tesが、燃費向上効果のある時間T1以上(Tes≧T1)であれば(S13で肯定判定)、エンジン停止を許可する(S15)。一方、Tes≧T1でない場合(S13で否定判定)でも、制動加速度Apmc≧勾配加速度Agあれば、ずり下がりを防止できるだけの制動力があるので、エンジン停止を許可する(S15)。Tes≧T1でなく(S13で否定判定)、かつApmc≧Agでない場合は(S14で否定判定)、エンジン停止を許可しない。
(もっと読む)
車両の表示制御装置
【課題】車両の表示制御装置において、運転者に燃費の良い走行や燃費の良い運転を促す点灯制御を行うことにある。
【解決手段】車両の比較的長時間にわたる走行履歴における燃料消費を反映する平均燃費の良否を判定するための閾値(A)と、比較的短時間の燃料消費を反映する瞬間燃費の良否を判定するための閾値(B)と、車両が所定の走行状態にあることを判定するための閾値(C)及びその走行状態が継続している経過時間を判定するための閾値(D)とを予め設定し、車両の実走行における平均燃費と瞬間燃費とを算出し、算出された平均燃費が所定の閾値(A)以上、かつ算出された瞬間燃費が所定の閾値(B)以上、かつ検出された車速が所定の閾値(C)以上となって所定の経過時間(D)が経過している点灯条件が成立する場合に、インジケータランプ(3)を点灯する。
(もっと読む)
車両の制御装置
【課題】エンジンの自動停止、自動再始動を行う車両において、登坂路での停車時における車両のずり下がりを好適に防止することのできる車両の制御装置を提供する。
【解決手段】エンジン1の自動停止、自動再始動を行う電子制御ユニット11は、エンジン1の停止中の登坂走行時に、停車後の車両のずり下がりが発生するか否かを判定する。そして電子制御ユニット11は、ずり下がりが発生すると予測されたときには、車両のずり下がりが発生する停車時迄にエンジン1の再始動が完了するように同エンジン1の再始動を開始する。
(もっと読む)
1 - 20 / 186
[ Back to top ]