
Fターム[3H081GG06]の内容
Fターム[3H081GG06]に分類される特許
1 - 20 / 75
流体圧アクチュエータ
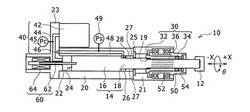
【課題】流体圧アクチュエータにおいて、直進駆動と回転駆動を精度よく行うことである。
【解決手段】流体圧アクチュエータ10は、スプール部16と出力軸18を含むロッド部14と、スプール部16を軸方向に摺動可能に保持するスリーブ部20と、出力軸18に同軸に設けられ、図示されていない回転駆動機構に接続される回転部50と、一方端32が出力軸18に固定され他方端34が回転部50に固定される捩じりバネ体30と、スプール部16の軸方向駆動のための直進駆動部40と、出力軸18の軸方向の変位を検出する変位センサ60を含んで構成される。
(もっと読む)
アクチュエータ用位置検出器

【課題】位置検出機構の本体部をアクチュエータのハウジングに対して確実にロックされた状態で固定し、ネジ軸部のナットに対する緩みが生じることを防止する。
【解決手段】位置検出機構11と第1固定機構12とが備えられる。第1固定機構12は、本体部13に一体のネジ軸部15、ネジ軸部15に螺合する位置決めナット16及び固定ナット17、位置決めナット16及び固定ナット17の回転を規制する規制部材18、を備える。位置決めナット16は、ネジ軸部15をハウジング103に位置決めする。固定ナット17は、ネジ軸部15をハウジング103に固定する。ネジ軸部15及び本体部13の軸心が偏心して設けられる。本体部13が、ハウジング103のガイド部21に沿って変位可能に支持される。
(もっと読む)
流体圧シリンダ装置
【課題】荷重変換器を有した流体圧シリンダ装置において、荷重変換器内の空間に溜まった油を容易に排出することができ、計測精度を低下させないようにすること。
【解決手段】ロッドカバー14の外側の端面には、薄肉の円筒状に形成されて軸方向に加わる荷重により弾性変形が可能であって歪みセンサーGUが取り付けられた弾性変形部43および弾性変形部の両端に形成されたフランジ部41,42を有する荷重変換器23が連結され、荷重変換器の外側のフランジ部42には、外部のフレームなどに取り付けるための取付けフランジ24が連結され、ピストンロッド13は荷重変換器および取付けフランジを貫通し、ピストンロッドとロッドカバーとの間にシール部材32,33が設けられており、荷重変換器には、弾性変形部とピストンロッドとの間の空間KK1に溜まった液体を外部に排出するためのドレン穴61が設けられてなる。
(もっと読む)
液圧装置
【課題】液圧ポンプの応答性を高めつつ電磁弁の開閉頻度を抑制することができる液圧装置を提供する。
【解決手段】モータ400により駆動され両方向に回転可能なポンプ450と、ポンプ450によりピストンロッド220が駆動する油圧シリンダ200と、ヘッド側ポートHPの管路に介挿された電磁弁320と、ロッド側ポートRPの管路に介挿されたパイロットチェック弁380および電磁弁310の少なくとも一方と、ピストンロッド220の変位を検出する直線変位計250とを備える。
(もっと読む)
位置決定用の装置を備えるピストンシリンダユニット
【課題】十分な安定性と堅牢性とを備え、その上、簡単且つ低コストで製造および設置することのできる位置決定用の装置を備えるピストンシリンダユニットを提供する。
【解決手段】本発明は、位置決定用の装置を備えるピストンシリンダユニット10に関し、前記装置は、少なくとも1つの励起手段を備え、前記励起手段は、ピストンシリンダユニットのシリンダ胴20およびシリンダピストン30と、間接的または直接的に、電気的に接続され、ピストンシリンダユニットおよび接触により形成される電気的な共振回路をその共振周波数で発振させるように励起し、共振周波数を特徴付ける電気的な信号は、ピストンシリンダユニットにおいて、測定可能である。本発明は、さらに、このようなピストンシリンダユニットを備える建設機械またはリフト装置に関する。
(もっと読む)
太陽パネル駆動システム、及び給湯システム
【課題】太陽パネルを回動させるアクチュエータユニットを軽量化する。
【解決手段】少なくとも1つの太陽パネル(92a)と、回転軸(95)を介して前記太陽パネル(92a)を支持する少なくとも1つの支持部(94)と、内圧に応じて伸縮変形する少なくとも1つの空気袋(101,102)を有し、該空気袋(101,102)の伸縮変形に伴い前記太陽パネル(92a)を前記回転軸(95)の軸周り方向に回動させるアクチュエータユニット(100)とを備える太陽パネルユニットを構成する。
(もっと読む)
ダイヤフラム装置
【課題】従来のダイヤフラム装置では移動軸の傾斜による測定誤差を回避する為に、移動軸を摺動自在に保持する有穴部材を設けているが、有穴部材を配置する余裕がない場合には対応できず、また有穴部材を配置できた場合でも大型化するという問題があった。加えて用途先の構造により移動軸が必然的に傾斜する場合には対応できないという問題があった。
【解決手段】検出軸201の軸方向の移動変位を検出するリフトセンサー200とダイヤフラム3の変形に応じ移動可能な移動軸5とを有するダイヤフラム装置において、移動軸5の一方側の先端は球面状で、リフトセンサー200の検出軸の一端を押圧する。これにより移動軸5が傾斜してもリフトセンサー200による移動軸5の移動距離検出の測定誤差が生じない。
(もっと読む)
アウトドライブ装置
【課題】舵角度を高い精度で把握でき、且つ、小型化によって搭載性を向上させることが可能となるアウトドライブ装置を提供する。
【解決手段】シリンダスリーブ21と、前記シリンダスリーブ21に摺動可能に内設されたピストン22と、から構成される操舵用油圧アクチュエータ20を備えたアウトドライブ装置であって、前記シリンダスリーブ21に検出装置26を具備し、前記検出装置26が前記ピストン22の位置を検出することによって舵角度を把握する、とした。
(もっと読む)
アウトドライブ装置用操舵システム
【課題】アウトドライブ装置の舵角度が不明になった場合に該アウトドライブ装置の舵角度を自動的に舵中央とすることができる技術を提供する。
【解決手段】シリンダスリーブに内設されたピストンが摺動することによってアウトドライブ装置10を回動させる操舵用油圧アクチュエータ20と、操舵用油圧アクチュエータ20の作動油の流動方向を変更してピストンの摺動方向を切り換えるスプールバルブ30と、スプールバルブ30に制御信号を送信して作動油の流動方向を変更させる制御装置40と、を備えたアウトドライブ装置用操舵システム100であって、アウトドライブ装置10の舵角度が舵中央となるときに位置するピストンについて検出できるピストン検出センサ27を具備し、制御装置40は、ピストン検出センサ27からの電気信号に基づいてスプールバルブ30を制御することでアウトドライブ装置10の舵角度を舵中央とする。
(もっと読む)
真空制御バルブ及び真空制御システム
【課題】本発明は遮断機能を有する真空制御バルブの設計自由度を高める技術を提供する。
【解決手段】本発明は、真空容器と真空ポンプとの間に接続され、作動流体によって弁開度を操作して真空容器内の真空圧力を制御する真空制御バルブ30を提供する。本真空制御バルブ30は、リフト量の調節による弁開度の操作と遮断とを行う弁体33とピストンとを有する動作部と、ピストンを収容するシリンダ31と、リフト量が小さくなる方向に動作部を付勢する付勢部と、ピストンの外周面とシリンダ31の内周面との間の隙間を、ピストンの動作に追従しつつ密閉するベロフラム34と、ベロフラム34によって密閉され、作動流体の作用圧力に応じてリフト量を大きくする方向に荷重を発生させる弁開度操作室と、作動流体の供給に応じて動作部に対してリフト量を小さくする方向に荷重を発生させる遮断荷重発生室と、を備える。
(もっと読む)
耐食位置測定システム及びこのシステムを形成する方法
位置と負荷の検出可能な流体圧アクチュエータ
【課題】ロッドの変位と当該ロッドに作用する負荷とを1台のセンサで検出できる流体圧アクチュエータを提案する。
【解決手段】ロッド2とピストン3との間に変位に応じた荷重を発生するスプリング4を配置し、ピストンとロッドとにそれぞれマグネット8,9を設け、磁歪式変位センサ7によってピストンとロッドとの軸方向距離及びロッドの軸方向位置を検出する。流体圧を受けてピストン3が移動すると、ロッド2にかかる負荷の大きさに応じてスプリング4が圧縮される。ロッドの負荷はスプリングの圧縮量に関係し、その圧縮量はピストンとロッドとの軸方向距離に比例し、この軸方向距離を変位センサで検出するので、結局、ロッドの負荷を求めることができる。ロッドの位置は変位センサによって直接検出できる。
(もっと読む)
流体アクチュエータ
【課題】ピストンの位置を正確に検出することができるようにする。
【解決手段】プローブ11bのフランジ32と縮径部21との間に設けられた板ばね51によって、フランジ32がロッドエンド5bに押し付けられているので、プローブ11bのロッドエンド5b側(右側)への移動が抑制されるとともに、プローブ11bの左側への移動が抑制される。
(もっと読む)
流体アクチュエータ
【課題】プローブをコンパクト化するとともに、プローブの固定作業を簡素化することができるようにする。
【解決手段】プローブ11bは、螺合部35に設けられたインサート51と、縮径部21の左側に設けられたワッシャ52とにより、ピストン4の摺動方向に沿った移動が抑制されている。縮径部21のロッドエンド5b側には固定手段を設けておらず、プローブ11bのピストンロッド5への固定作業はすべて左側から行われる。
(もっと読む)
エアベアリングシリンダ
【課題】ピストン及びピストンロッドを高精度で進退させることができるだけでなく、高精度で回転させることもできるエアベアリングシリンダを提供する。
【解決手段】軸部材6を軸方向に進退させるシリンダ本体2と、軸部材6をその軸回りに回転させるブラシレスDCモータ3と、軸部材6の回転角度を検出するレゾルバ4と、軸部材6の進退距離を検出するインダクトコーダ5とを備える。ブラシレスDCモータ3のマグネット32の長さは、軸部材6のストロークと巻線コイル35の直径との和にほぼ等しくなるように設定され、レゾルバ4の磁性体47の長さは、軸部材6のストロークと励磁コイル43及び出力コイル44(45)の直径和との和にほぼ等しくなるように設定されている。これにより、軸部材6の進退時における軸部材6の回転駆動や回転角度検出を可能にしている。
(もっと読む)
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、ストロークに伴って円周上の位置が異なるように軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、ピストンロッド30の周囲を囲むように略等間隔で設けられ磁気スケール60を検出可能な複数のMR素子50a〜50fを同一円周上に備える。
(もっと読む)
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、軸方向のストロークによって異なる形状が軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、磁気スケール60の形状によって出力が変化するMRセンサ50を備える。
(もっと読む)
ロータリアクチュエータ
【課題】低発熱での高トルク性、高速駆動性及び高精度位置決め制御性を同時に満足するロータリアクチュエータは存在しなかった。
【解決手段】制御対象1には、空気圧アクチュエータ21、電磁アクチュエータ22及びロータリエンコーダ23よりなるロータリアクチュエータ2が結合されている。空気圧アクチュエータ21は低発熱での高トルク性のベーン形揺動アクチュエータであり、電磁アクチュエータ22は高速駆動性(高応答性)かつ高精度位置決め制御性のボイスコイルモータであり、制御対象1に対して並列配置されている。
(もっと読む)
微小変位出力装置
【課題】摺動運動を行わず、適当な精度で変位を出力できる微小変位出力装置を提供することである。
【解決手段】目標とする変位量に対し実際の変位量がフィードバックされる微小変位出力システム10は、微小変位出力装置20と変位出力部12と制御装置18を備えて構成される。微小変位出力装置20は、筒状の筐体部22の先端側開口を覆って気体室28を形成し、気体室28に供給される制御気体圧Psに応じて面状弾性変形する蓋部30と、蓋部30の変位を検出する変位検出部40を含む。蓋部30は、筐体部22の筒状外周部に取付けられる外周取付部32と、中央部に設けられ弾性変形による変位を外部に出力する出力軸部34と、外周取付部32と出力軸部34との間の薄板部36とを有する。
(もっと読む)
成形機の射出装置
【課題】液圧源及び流量制御弁の小型化が可能な成形機の射出装置を提供する。
【解決手段】射出装置1は、射出シリンダ装置7に連通された変換シリンダ装置9と、アキュムレータ11からの作動液の流れを制御可能な液圧回路17とを有する。変換シリンダチューブ27は、大径シリンダ部27bと、大径シリンダ部27bの、ヘッド側室25hとは反対側に連通し、大径シリンダ部27bよりも小径の後側小径シリンダ部27cとを有する。液圧回路17は、アキュムレータ11からの作動液の流量を制御可能なサーボバルブ45を有する。また、液圧回路17は、サーボバルブ45を通過した作動液を、大径後側室27bh及び小径後側室27chに供給可能であり、且つ、サーボバルブ45を通過した作動液の、大径後側室27bhへの供給及び小径後側室27chへの供給の双方を個別に禁止可能に構成されている。
(もっと読む)
1 - 20 / 75
[ Back to top ]