
Fターム[3J053AB34]の内容
流体伝動装置の制御 (6,334) | HST(制御内容) (1,218) | 出力内容に関連した制御 (315) | 速度制御 (226) | 加速、減速制御 (43)
Fターム[3J053AB34]に分類される特許
1 - 20 / 43
作業車両

【課題】駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップの発生を未然に防止することができるようにする。
【解決手段】作業車両400において、駆動輪40を回転させる回転動力を発生するモータ480と、前記モータ480の回転数を設定する速度設定手段(50)と、前記モータ480の回転数が、前記速度設定手段(50)により設定された回転数となるまで所定の変化率で変化するように前記モータ480の回転数を制御する制御装置460と、前記所定の変化率を設定する変化率設定手段462を具備し、前記制御装置460は、前記変化率設定手段462による設定に基づいて前記所定の変化率を調節する構成とした。
(もっと読む)
ハイブリッド作業車及びその走行制御方法

【課題】ハイブリッド作業車における無駄なエネルギー消費を抑制しエネルギーの回生効率を高める。
【解決手段】車両の減速時に電動モータが車輪から回されて所定の回転数以上のときはHSTブレーキを使わず、電動モータによる回生ブレーキのみで制動を行う。また、減速時にHSTの油圧がリリーフしないように電動モータの発電トルク及び油圧ポンプの斜板傾転角を制御する。また、加速時には油圧がリリーフしないように電動モータ5の回転数及び油圧ポンプの斜板傾転角を制御する。これにより、電動モータの出力を無駄なく駆動力として利用するとともに、減速時における回生効率を向上させることができ、燃費向上が可能となる。
(もっと読む)
作業車の負荷制御装置
【課題】エンジン負荷が大きいほど走行駆動系の変速装置が減速操作されるように制御するにあたり、走行駆動系とは別の駆動系である外部動力取出軸からの動力で駆動される作業装置が安定的に稼働するように制御すること。
【解決手段】制御手段は、PTO系作業装置の作動状態が検出されているときにおけるエンジン回転数の設定回転数からの低下率又は低下量の方が、PTO系作業装置の非作動状態が検出されているときにおけるエンジン回転数の設定回転数からの低下率又は低下量よりも小さい状態で、変速操作手段に制御信号を出力するように、作業状態検出手段の検出信号に基づく変速操作手段への制御信号の出力状態を変更するように構成されている。
(もっと読む)
作業車両の制御装置およびその制御方法
【課題】低燃費を維持しつつ、クラッチ開放時やクラッチ係合時の圧力変動による衝撃を小さく、油圧回路等の損傷を防止して滑らかなクラッチ動作をすること。
【解決手段】1ポンプ2モータ形式HSTで、HSTモータ10aの出力軸への動力の伝達がクラッチ13を介して行われるようにクラッチの開放または係合が行われ、HSTモータ10a,10bの動力によって走行する作業車両の制御装置において、作業車両の作業車両負荷をスロットル出力量とエンジンのエンジン回転数から求め、クラッチ13の開放移行制御時に、作業車両負荷をもとに予め求められたHSTポンプ4の上限吐出量の制限下でHSTポンプ4のポンプ吐出量を小さくする制御を行い、クラッチ13の係合移行制御時に、作業車両負荷をもとに予め求められたHSTポンプ4の下限吐出量の制限下でHSTポンプ4のポンプ吐出量を大きくする制御を行うHSTコントローラ31を備える。
(もっと読む)
トラクタの変速操作装置
【課題】本発明は、高速直進走行から旋回走行への移行時における急旋回の防止を図るとともに、また、逆に耕耘等の低速直進の作業走行から旋回走行への移行時においては、速やかな旋回を行って作業効率を上げるようにすることを課題とする。
【解決手段】変速操作具(A)で前進位置・中立位置・後進位置に設定するシフト範囲を切り替えるトラクタの変速操作装置において、高速直進から旋回に移った場合に走行速度を低下させる構成とし、低速走行で耕耘等の作業を行っている時には、旋回速度を逆に速くする制御を行うように構成したことを特徴とするトラクタの変速操作装置の構成とする。
(もっと読む)
作業車両の制御装置および制御プログラム
【課題】操作ストロークを増減させて微調整を行う場合にもオペレータの感覚通りの制御量(速度比)が得られるようにする。
【解決手段】第1のラインL11上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第1のラインL11に従って速度比を演算する。第2のラインL12上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置が操作された場合には、第2のラインL12に従って速度比を演算する。第1のラインL11上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置21が操作された場合あるいは第2のラインL12上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第3のラインL131、L132、L133、L134に従って速度比を演算する。
(もっと読む)
作業車両
【課題】ブレーキ操作でオートクルーズを解除した場合のトラクタの速度減速率又は前後進ペダル操作でオートクルーズを解除した場合のトラクタの速度変化率が走行安全性が従来より高まるようにした作業車両を提供すること。
【解決手段】油圧式無段変速装置21の出力を略一定に維持するオートクルーズ機構を備えた車両で、(a)ブレーキペダル(43)の操作によりオートクルーズ制御が解除される場合の作業車両の速度減速率を、前後進ペダル(1)の作動解除又は減速方向への操作による作業車両の速度減速率よりも大きく設定すること、又は(b)前後進ペダル(1)の加減速操作によるオートクルーズ制御解除時の作業車両の速度変化率を、オートクルーズ制御を行っていないときの前後進ペダル(1)の操作による作業車両の速度変化率より小さく設定することで目標車速にする。
(もっと読む)
作業機械
【課題】高速直進走行からターン操作する際に、ターン操作の開始時点において高速から低速へ減速させることができる作業機械の提供。
【解決手段】本発明は、左走行レバー11の操作を検出する第1リミットスイッチ13と、右走行レバー12の操作を検出する第2リミットスイッチ14と共に、第1リミットスイッチ13から出力される信号、及び第2リミットスイッチ14から出力される信号に基づいて、左走行レバー11及び右走行レバー12の操作によって走行体1のステアリング操作が実施されようとしているかどうか判定する操作状態判定手段28bを含み、ステアリング操作が実施されようとしていると判定されたときに、左走行モータ23及び右走行モータ24の容量を制御する容量制御弁30に、左走行モータ23及び右走行モータ24を低速駆動させる容量に制御する制御信号を出力するコントローラ28を備えている。
(もっと読む)
油圧駆動式の車両、およびその制御方法と制御装置
【課題】HST(静液圧トランスミッション)を有するパワートレインを備えた車両において、クリープ現象、アクセル操作に対する発進タイムラグ、走行中にアクセル操作量を急激に減らした時のエンジン・オーバーラン、及び走行中に負荷が急増した時のエンジン・ストールなどの問題を解決する。
【解決手段】パワートレイン10内のHSTコントローラ15が、アクセル操作量に応じてHSTポンプ23の最大吸収トルクを制御する。他方、車両の走行中にアクセル操作量が急激に減った時、または車両の走行中にエンジン回転数が急激に減った時には、エンジン回転速度に応じてHSTポンプ23の最大吸収トルクが制御される。
(もっと読む)
油圧走行駆動装置
【課題】油圧ポンプおよび油圧モータを有する油圧閉回路を有する油圧走行駆動装置において、急逆操作を行った場合に、高圧のブレーキ圧の発生を抑制し、かつ、安価で信頼性の高い装置を提供する。
【解決手段】前後進切換操作レバーが、後進から前進に切換えられると、コントローラは、前後進切換操作レバーの入力方向と速度・進行方向検出器が検出した車両の進行方向が逆であるか否かを判断する。判断結果が肯定された場合、急逆操作が行われたと判断して、油圧式ポンプ傾転方向切換弁に対し、中立位置に保持する指令を出し、入力信号に対応した位置への切換の指令を遅延して出す。
(もっと読む)
静油圧/機械トルク分割を有する連続可変トランスミッションを動作させるための方法、および該方法を実施するためのトランスミッション
【課題】静油圧/機械トルク分割を有する連続可変トランスミッションを動作させるための新規な方法を提供すること。
【解決手段】トランスミッション10は、駆動入力シャフト12により内燃機関11に結合され、ポンプとして動作する第1の静油圧ユニットH1と、モータとして動作する第2の静油圧ユニットH2とを有し、第1および第2の静油圧ユニットが、圧力ライン29、30により回路中で互いに液圧的に結合され、かつトランスミッションの静油圧的分岐部を形成し、トランスミッションが、駆動入力シャフトで利用できる出力をトランスミッションの静油圧的分岐部と機械的分岐部との間で分割するためのプラネタリ駆動部13を更に備える。所定の牽引力特性を有する牽引力の制御は、第1の静油圧ユニットの容量および少なくとも1つの第2の静油圧ユニットの容量を互いに独立に調整することで可能となる。
(もっと読む)
油圧無段変速走行装置の変速制御
【課題】本発明は、HST斜板角を自動制御する油圧無段変速走行装置の変速制御において、急激な駆動負荷の増加を検出して、駆動負荷の増加程度に応じて最適のHST斜板角に変更して変速することで 駆動負荷の急激な増加が生じてもエンジン停止に至らないで出来るだけ走行速度を落とさないで走行できるようにすることを課題とする。
【解決手段】走行スロットル手段90と走行速度検出手段100と制御手段92及び油圧無段変速走行装置1のHST斜板角変更手段113を設け、前記走行スロットル手段90を最大加速に設定した場合に前記走行速度検出手段100で検出する走行速度減少率が大であると、HST斜板角変更目標角度を小さな目標角度に変更してなる油圧無段変速走行装置の変速制御とする。
(もっと読む)
乗用型農作業機
【課題】走行停止によって走行クラッチが切れると共にブレーキが効く乗用型農作業機において、発進フィーリングを高める。
【手段】変速ペダル57の回動に連動して周面カム100が回転し、周面カム100の回転に連動してペダルセンサ103が制御軸102と一緒に回転する。ペダルセンサ103はセンサーアーム106a,106bを有しており、センサーアーム106a,106bがペダルセンサ103の本体に対して相対回動することで制御モータ122がON・OFFされて走行速度が変化する。変速ペダル57が戻り切ると連動軸157の引き作用で走行クラッチ63が切れると共にブレーキ66が効く。周面カム100における第1カム面112の作用により、変速ペダル57の踏み込み初期の回動が制御軸102の回転に増幅して伝えられ、走行クラッチ63の入りとブレーキ66の解除とが迅速に行われる。
(もっと読む)
制動性の改善を可能にする液圧伝達装置
液圧伝達装置(10)は、供給配管(22A)と排出配管(22B)とを有する基礎モータ(22A)と、供給・排出配管がバイパスリンク(62)を経由して相互接続されるバイパス位置をとるのに適した変位量セレクタと、前記バイパスリンクを狭める狭窄手段(70,72)とを有する。セレクタがバイパス位置にあるとき、排出配管内の吐出圧力が、制御チャンバ(58)内の制御圧力に応じて変化する狭窄閾値を超えていれば、狭窄手段が駆動してバイパスリンク内の流体の流れを制限する。この構成により、基礎モータはバイパスリンクを介してブレーキトルクを発生することができ、このトルクは制御チャンバ内の圧力によって容易に制御可能である。 (もっと読む)
建設機械の走行制御装置
【課題】低速モード及び高速モードの切換えによる多様な速度操作性を確保しつつ、急発進を防止することができる建設機械の走行制御装置を提供する。
【解決手段】走行用操作レバー21L,21Rの操作に応じて油圧ポンプ29a,29bから走行用油圧モータ10L,10Rへの圧油の流れを制御する走行用方向切換弁31L,31Rと、低速モード及び高速モードの切換えを指示可能な切換スイッチ25とを備えた建設機械の走行制御装置において、走行用操作レバー21L,21Rの操作量が予め最大操作量の5〜30%の範囲内で設定された設定量に達していないと判定された場合は、切換スイッチ25の切換え指示を無効として低速モードを設定し、走行用操作レバー21L又は21Rの操作量が設定量に達したと判定された場合は、切換スイッチ25の切換え指示を有効とし、高速モード及び低速モードのうちのいずれかを選択設定する制御装置43とを備える。
(もっと読む)
作業車の負荷制御装置
【課題】エンジン負荷が大きいほど走行駆動系の変速装置を減速操作するにあたり、走行駆動系とは別の駆動系である外部動力取出軸からの動力で駆動される作業装置が安定的に稼働するように制御できる作業車の負荷制御装置を提供する。
【解決手段】走行駆動系とは別系の外部動力取出軸を介してエンジン動力が伝達されるPTO系作業装置の作動の有無を判別する作業状態検出手段74を備え、PTO系作業装置の作動状態が検出されているときにおける変速操作手段による減速操作量が、PTO系作業装置の非作動状態が検出されているときにおける減速操作量よりも大きくなるように制御する。
(もっと読む)
油圧式走行装置の制御装置
【課題】油圧式走行装置における減速力を増強すると共に、ブレーキ不要時における走行抵抗の発生を抑制する。
【解決手段】制御装置は、油圧モータ13の下流位置における作動油の流量を変化させる可変式絞り弁3と、可変式絞り弁3を制御する制御部41と、ブレーキ必要時か否かを判断する判断部42と、を備える。制御部41は、判断部42における判断結果に基づき、(i)ブレーキ必要時においては、下流位置における作動油の流量を低下させ、(ii)ブレーキ不要時においては、下流位置における作動油の流量を変化させない。
(もっと読む)
作業車両
【課題】HSTのトラニオン軸の回動角度変更時にクラッチ切換が行われても、エンジン回転数のドロップが起きないようにして加速をスムーズに行うことができる走行車両を提供すること。
【解決手段】HSTペダルの踏み込み量に応じてトラニオン軸の開度とエンジン回転数を変更し、変速装置の低速側油圧クラッチから高速側油圧クラッチに切り換える時には、HSTペダルの踏み込み位置に対応するトラニオン軸の開度を変更して、該開度が最大回動角度の所定割合を超えるときには所定の短い時間の間はトラニオン軸を減速側に前記所定割合まで戻すことでエンジン回転数のドロップする度合いを小さくして、低速側油圧クラッチから高速側油圧クラッチへの切り換えをスムーズに行い、車両を迅速に加速することができるようにした。
(もっと読む)
自走式リサイクル機械
【課題】 走行時の制御を簡単なスイッチの遠隔操作だけで行い、走行速度の切換操作もオペレータの意向に沿って安全に行うことができるようにする。
【解決手段】 遠隔操作を行うリモコン30に走行スイッチ30Aを設ける。走行スイッチ30AのON,OFF操作により、走行用油圧モータ23,24を回転,停止させる。そして、リモコン30の走行スイッチ30AをON操作し続ける持続時間が予め決められた所定時間に達するまでは、エンジン回転数を低速走行時のエンジン回転数Nmin に設定する。一方、前記持続時間が所定時間以上になったときには、エンジン回転数を高速走行時のエンジン回転数Nmax まで漸次増大させる。これによって油圧ポンプ21の吐出量を増大させ、走行用油圧モータ23,24の回転速度を圧油の流量に応じて増大させる構成とする。
(もっと読む)
流体静力学ドライブ機械を制動する制御システムおよび方法
流体静力学ドライブ機械(10)を制動する方法は、流体静力学ドライブシステム(14)のポンプ(18)の押しのけ容積をゼロでない押しのけ容積まで縮小するステップ、流体静力学ドライブシステム(14)のモータ(22)の押しのけ容積を最大押しのけ容積未満の押しのけ容積まで拡張するステップを含む。その方法はまた、流体静力学ドライブシステム(14)のエンジン(20)を所望のエンジン回転数範囲に向かって加速するステップを含む。 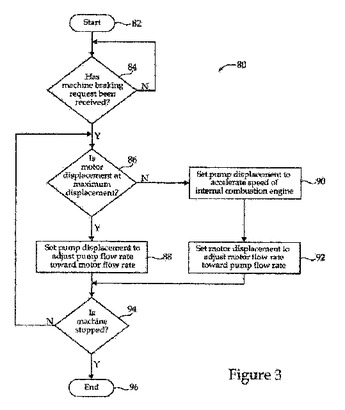 (もっと読む)
(もっと読む)
1 - 20 / 43
[ Back to top ]