
Fターム[3J057BB03]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | クラッチ種別 (1,812) | 摩擦クラッチ (1,726) | ディスク (1,487)
Fターム[3J057BB03]の下位に属するFターム
多板(摩擦ディスクが二枚以上) (911)
Fターム[3J057BB03]に分類される特許
81 - 100 / 576
車両の制御装置
【課題】クラッチの耐久性を向上可能な車両の制御装置を提供すること。
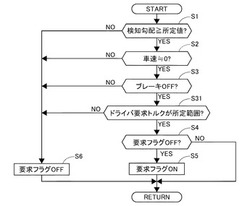
【解決手段】アクセルヒルホールド時に、クラッチを開放し、ブレーキ制御手段によって車両停止状態を維持する締結要素保護制御を、アクセルペダル開度に基いて設定された要求トルクが勾配負荷トルク相当値に基づいて設定された上限トルクと下限トルクの範囲内か否かで判断し、要求トルクが上限トルクと下限トルクの範囲外となったときは、締結要素保護制御を解除する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】 エンジンアイドル時の振動や音を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 第1締結要素が解放されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンの燃費を高める第1目標アイドル回転数に設定し、第1締結要素が締結されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンによる共振を抑制する第2目標アイドル回転数に設定するようにした。
(もっと読む)
ハイブリッド車両のエンジン始動制御装置
【課題】運転者の加速意図に応じてエンジンの始動制御を行う。
【解決手段】エンジン1とモータ5とを駆動源として備え、エンジン1とモータ5とが伝達トルク容量を変更可能なクラッチ6を介して連結され、エンジン1を始動する際には前記クラッチ6を締結してモータ5の駆動力によりエンジン1のクランキングを実施する。運転者のアクセル操作の結果により停止中のエンジン1を始動する際に、運転者の加速意図が大きい場合には、運転者の加速意図が小さい場合に比べて、エンジン1のクランキング中の前記クラッチ6の伝達トルク容量を大きくする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータアシスト変速性能の向上を図る。
【解決手段】統合コントローラ20は、モータジェネレータMGの回転数制御に使用可能とするMGトルクについてトルク制限値Tlimitにより制限を掛けている。ここで、トルク制限値Tlimitは、第2クラッチCL2が締結している場合、第1制限値T1に設定され、第2クラッチCL2がスリップ状態である場合、回転変化に必要な補正トルクである第2制限値T2と第1制限値T1との加算値に設定される。
(もっと読む)
車両用学習装置およびハイブリッド車両
【課題】クラッチに関する学習機会を適切に確保することができる車両用学習装置を提供すること。
【解決手段】エンジン1と、制御可能なクラッチ5と、クラッチを介してエンジンに接続された入力軸2Aと、車両100の駆動輪16に接続された出力軸2Bと、を有する変速機2と、変速機をニュートラルとした状態で駆動輪に動力を出力可能なモータジェネレータ3と、を備え、エンジンを運転させ、かつ変速機をニュートラルとした状態で、クラッチの係合度合いに関する学習制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動輪のスリップ可能状態を検出したとき、モータと駆動輪の間に介装した第2摩擦要素のスリップ状態を維持することができるハイブリッド車両の制御装置を提供する。
【解決手段】本発明のハイブリッド車両の制御装置は、スリップ検出手段(ステップS1)により駆動輪7,7のスリップ可能状態が検出されたとき、第1摩擦要素4を開放すると共に第2摩擦要素5をスリップ締結し、第2摩擦要素5を介して伝達される駆動力で走行する「MWSCモード」を禁止し、第1摩擦要素4を締結すると共に第2摩擦要素5をスリップ締結し、第2摩擦要素5を介して伝達される駆動力で走行する「WSCモード」に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードからHEV走行モードへのモード遷移時に、摩擦要素の入力回転数の吹け上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】本発明のハイブリッド車両の制御装置は、摩擦要素(第2クラッチ)CL2をスリップ締結し、摩擦要素CL2を介して伝達される駆動力で走行するエンジン使用スリップ走行モード(WSC走行モード)から、エンジンEngとモータMGの両方の駆動力で走行するハイブリッド車走行モード(HEV走行モード)へモード遷移を行う際、目標駆動トルク制御手段(第2フィルタ処理部)203によって、要求駆動トルクの変化に対して、目標駆動トルクの変化を制限するトルク制限制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン始動前に電気走行モードからハイブリッド走行モードへのモード切り替え要求がキャンセルされた際の排気および運転性の悪化を抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】 統合コントローラ20は、EVモードからHEV走行モードへのモード切り替え要求に伴うエンジン始動要求がなされた後、エンジン始動前に当該モード切り替え要求がキャンセルされた場合、既にエンジン回転数Neが上昇を開始しているとき、すなわちエンジン1がクランキング中であるときには、エンジン始動後にエンジン1を停止させる。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 適切な走行シーンにおいて第1クラッチの学習補正を行うことが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 第2クラッチをスリップ制御してモータを回転数制御しているときに、第1クラッチの締結・開放が行われる走行モードの遷移であっても、第1クラッチの締結・開放以外の要因でモータトルク変動が生じる場合には、第1クラッチの学習補正を禁止することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
ハイブリット車のクラッチ制御装置
【課題】ハイブリット車の走行モードを変更する際、クラッチ圧力センサが故障していても、二次故障の発生を低減することができるハイブリット車のクラッチ制御装置を提供する。
【解決手段】ハイブリット車のクラッチ制御装置において、パラレル走行からシリーズ走行、EV走行へ変更する際(S1、S2)、油温と車速に基づいて、クラッチが結合している状態から完全に開放するまでのクラッチ開放時間Taを求め(S3、S4)、油圧制御弁によりクラッチの開放制御を開始してからクラッチ開放時間Ta経過後(S5)、クラッチが完全に開放したと判断して、シリーズ走行、EV走行における制御を許可する(S6)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
車両のクラッチ制御装置
【課題】駆動力伝達時、シール部材単体でのシール性を向上させることなく、振動が入力されても油圧シリンダのシール部材からの油漏れを防止すること。
【解決手段】FRハイブリッド車両のクラッチ制御装置は、ノーマルクローズタイプの第1クラッチCL1と、油圧シリンダ14と、ピストン41と、リップシール43と、保圧制御手段(図5のステップS6〜ステップS8)と、を備える。第1クラッチCL1は、エンジンEngと左右後輪RL,RRの間に介装され、ダイヤフラムスプリング26により付与される弾性力にてクラッチ締結を維持する。リップシール43は、ピストン41に設けられ、ハウジング摺動面45との間のシール性を、ピストン室42の油圧高まりにより高くする。保圧制御手段は、第1クラッチCL1の締結時、クラッチ締結状態を維持しつつ、油圧シリンダ14のピストン室42に、リップシール43によるシール性を保つ油圧を加える。
(もっと読む)
クラッチ制御装置
【課題】アクチュエータを用いてクラッチのレリーズ動作を行うクラッチ制御装置において、クラッチディスクの摩耗によるタッチポイントの位置変化を検知して、クラッチの断接及び伝達トルクの制御を適切に行う。
【解決手段】クラッチ制御装置40は、モータ42と、モータ42によって作動され、初期位置から切断位置に前進することでクラッチ10を接続状態から切断状態とし、切断位置から初期位置へ後退することでクラッチ10を接続状態とするカム44と、カム44の変位をレリーズフォーク36に伝達するローラ56と、カム44を退避位置に後退させた後に前進させ、ローラ56を介してクラッチレリーズ機構30に荷重を開始した位置をカムの初期位置に設定し、設定した初期位置に基づいてクラッチ10の断接及び伝達トルクの制御を適切に行うECU60とを備える。
(もっと読む)
車両のクリープトルク制御装置
【課題】車両に作用する制動力に応じて的確に且つ応答性よくクリープトルクを制御でき、もって燃料消費の低減やクラッチの消耗抑制を十分に達成できる車両のクリープトルク制御装置を提供する。
【解決手段】クラッチ回転速度Ncの増加に伴って目標クリープトルクを低下させ、且つブレーキ液圧の増加に伴って目標クリープトルクを低下させる通常時クリープトルク特性A〜Dをマップとして予め記憶させる。そして、このマップに基づきクラッチ回転速度Nc及びブレーキ液圧から目標クリープトルクを算出することで、クラッチ回転速度Ncやブレーキ液圧が変化したときに直ちに目標クリープトルクを増減させてクラッチの半クラッチ制御に反映させる。
(もっと読む)
81 - 100 / 576
[ Back to top ]