
Fターム[3J070CA44]の内容
機械式制御装置 (8,193) | 操作部材それ自体 (471) | 手、足が触れる部分(ノブ、ペダル等) (391) | 付属部品を取付けたもの (149) | 付属操作部を有するもの (112) | 押しボタン (39)
Fターム[3J070CA44]の下位に属するFターム
ロック解除用 (8)
Fターム[3J070CA44]に分類される特許
1 - 20 / 31
ターンレバー装置
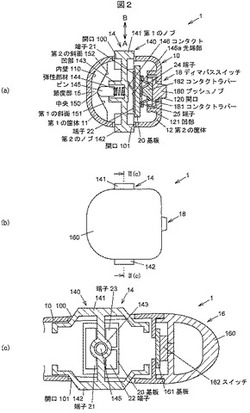
【課題】小型化することができるターンレバー装置を提供する。
【解決手段】実施の形態に係るターンレバー装置1は、主に、操作レバー10に設けられ、なされた操作に基づいて車両の右ウインカ及び左ウインカを点灯させる操作信号を出力するモーメンタリスイッチ14を備えている。このモーメンタリスイッチ14は、例えば、第1のノブ141及び第2のノブ142が一体とされたノブターン140と、操作されたノブターン140を初期位置(中立位置)に戻す節度部15と、導電性を有してノブターン140に設けられたコンタクト146と、ノブターン140の操作に基づいてコンタクト146を介して導通する複数の端子が形成された基板20と、を備えて概略構成されている。
(もっと読む)
作業機械

【課題】作業性を向上させた操作レバーを備える作業機械を提供する。
【解決手段】バケット26と、ブーム21と、エンジンEと、ブームシリンダ23と、ダンプシリンダ24と、ブームシリンダ23を駆動操作するためのブーム操作レバー20と、ダンプシリンダ24を駆動操作するためのバケット操作レバー19とを備えるトラクタ10において、バケット操作レバー19とブーム操作レバー20にそれぞれ、トリガースイッチ19t,20tを備え、トリガースイッチ19t,20tを操作してエンジンEの回転数を上昇させ、ブームシリンダ23とダンプシリンダ24へ伝達する駆動力を増す。
(もっと読む)
パーキングブレーキ操作装置
【課題】剛性や意匠の低下を招くことなくレリーズロッドにポールおよびレリーズノブを取り付けた状態でレバー本体に対して効率的に組み付けることができるようにする。
【解決手段】操作部22に設けられたスリット64が、レリーズロッド38を導入可能な幅寸法W1を有するとともに、回動連結部42を導入可能な幅広部66を備えており、スリット64を介してレリーズロッド38および回動連結部42を操作部22内に導入することが可能で、ポール30およびレリーズノブ40が取り付けられたロッド組立体68の状態で、レバー本体62内の所定位置に組み付けることができる。また、基端部20から離れた操作部22に幅広部66が設けられているため、大きな操作力が作用する基端部20に幅広部を設ける場合に比較してレバー本体62の剛性低下が抑制されるとともに、スリット64の幅寸法W1を部分的に大きくするだけで良いため意匠が良好に維持される。
(もっと読む)
ジョイスティック装置及び位置入力制御装置
【課題】従来のジョイスティック装置では、入力部が操作ボタンであったため、操作レバーの操作に基づく制御動作に対する微調整を行うことが難しく、制御の微調整を行うためには操作者の熟練性を要していた。
【解決手段】把持部16を有し且つ揺動可能に支持されて揺動姿勢に応じて第1の相対位置情報を出力する操作レバー2と、この操作レバーの把持部に設けられ且つ指が接触することで第2の相対位置情報を出力するタッチパネル20と、を備えて構成されている。
(もっと読む)
操作レバーのグリップ
【課題】グリップの弾性変形によって係止部を被係止部に係止させて抜け止めする場合に、寸法誤差による組付性の悪化を抑制しつつ軽量化を図る。
【解決手段】グリップ10は、係止部34を備えている弾性変形可能な樹脂(ポリ塩化ビニル)製のインナー部材26と、そのインナー部材26の外周側を被覆するように設けられたインナー部材26よりも硬質で比重が小さい樹脂(ポリプロピレン)製のアウター部材28とによって構成されているため、操作レバー本体12に嵌合する際には多少の寸法誤差であればインナー部材26の弾性変形によって係止部34が係止爪(被係止部)30を乗り越えることが可能で、操作レバー本体12に対して容易に組み付けることができる。また、インナー部材26の外周側には比重が小さいアウター部材28が設けられているため、全体をインナー部材26と同じポリ塩化ビニルで一体に構成する場合に比較して軽量化を図ることができる。
(もっと読む)
ジョイスティック装置
【課題】ダイヤルノブが一端に結合される回転筒およびケース間に、回転筒の回転位置を検出する回転位置検出手段が設けられるジョイスティック装置において、回転筒の回転位置を磁気センサで検出するにあたって回転筒の軸方向に沿う磁気センサの配置上の自由度を高めるとともに必要とされるマグネットの個数を少なくする。
【解決手段】回転位置検出手段87が、回転筒80に設けられる駆動ギヤ88と、駆動ギヤ88に噛合する被動ギヤ90が外周に設けられる回転体89と、回転体89にその周方向に間隔をあけて設けられる複数のマグネット91と、回転体89の回転に伴うマグネット91との相対位置変化に応じて回転筒80の回転位置を検出すべく回転体89の他端部に対向してケース17に配設される磁気センサ92とを備える。
(もっと読む)
節度用アクチュエータ
【課題】主に各種電子機器の操作に用いられる節度用アクチュエータに関し、良好な操作感触が得られ、確実な操作が可能なものを提供することを目的とする。
【解決手段】固定体11と形状記憶合金製のワイヤー13の収縮または伸張によって移動する可動体12の間に、節度感触を生じて反転する反転ばね14を設けることによって、ワイヤー13の収縮や伸張によって可動体12を移動する際、可動体12に所定の移動距離で節度感触を生じて反転する反転ばね14の力が加わり、歯切れが良く節度感のある可動体12の移動が行われるため、良好な操作感触が得られ、確実な操作が可能な節度用アクチュエータを得ることができる。
(もっと読む)
乗用移植機
【課題】走行変速レバーの操作中における植付操作ボタンの操作性を向上させる。
【解決手段】植付クラッチの切り操作及び植付作業機4の上昇操作が可能な第一植付操作ボタン17と、植付クラッチの入り操作及び植付作業機4の下降操作が可能な第二植付操作ボタン18を走行変速レバー14のレバーグリップ16に配置した乗用田植機1において、レバーグリップ16の上部は、その下側のレバーグリップ16の中央部よりも前後幅が広がるように前方に膨出し、第一植付操作ボタン17は、レバーグリップ16の上部の前後幅中間位置に配置し、第二植付操作ボタン18は、レバーグリップ16の中央部の前後幅中間位置よりも前端側に配置される。
(もっと読む)
作業車両用のレバーグリップ
【課題】操作レバーの種類を示す色分けを容易にする。
【解決手段】乗用田植機1に設けられ、後方から視認される走行変速レバー14のレバーグリップ16であって、該レバーグリップ16に、左右を向く取付ネジ(ボルト19)を用いて走行変速レバー14の上端部に取付けられる取付部16dを形成し、該取付部16dを、走行変速レバー14の種類を示す色が付された取付部カバー20で覆うと共に、該取付部カバー20を、前方が開放した平面視コ字形状とし、取付部16dに対して後方から嵌合させる。
(もっと読む)
建設機械の操作レバー装置およびコンソール
【課題】操作レバーの揺動に伴うワイヤハーネスの局部的な曲げ作用を抑えることができ、これによってワイヤハーネスの局部的な劣化を未然に防ぐことができる建設機械の操作レバー装置およびコンソールを提供する。
【解決手段】操作レバー32の揺動に伴いその操作レバー32の中間結合部材37のハーネス取出口37cが描く円弧状軌跡を含む円周42に側面視で沿うようにワイヤハーネス41をその操作レバー32の後方に向けて配線し、側面視で操作レバー32の最後退位置と円周42における操作レバー32の後退方向の一番遠い位置との間にハーネスガイド51,52を配置する。このような構成の操作レバー装置27を、サスペンション装置21上に設置される基台22上でオペレータシート23と共に取り付けられるコンソール筐体25に装備することで、オペレータシート23と同一の振動系のコンソール24を得る。
(もっと読む)
作業用走行車の変速操作具
【課題】親指の負担を小さくして変速操作による疲労を軽減する。
【解決手段】主変速操作具143を副変速レバー140のオペレータ側の側面に前後回動自在に設け、主変速操作具143の前方への回動操作にもとづいて主変速装置20を増速側に変速させ、主変速操作具143の後方への回動操作にもとづいて主変速装置20を減速側に変速させるにあたり、主変速操作具143に、副変速レバー140のグリップ部142を握りながら親指の腹部で前方に押し操作可能で、かつ、該押し操作に応じて主変速操作具143を前方に回動させる前方押し操作部143cと、副変速レバー140のグリップ部142を握りながら親指の腹部で下方に押し操作可能で、かつ、該押し操作に応じて主変速操作具143を後方に回動させる下方押し操作部143dとを設ける。
(もっと読む)
入力装置
【課題】停止させた回転駆動部の駆動を容易に再開させることが可能な入力装置を提供する。
【解決手段】このダイヤルスイッチ100(入力装置)は、回転可能な操作部1と、操作部1を所望の回転速度で回転させることが可能な超音波モータ14と、操作部1の回転速度を検知する光エンコーダ16と、超音波モータ14を用いて操作部1の回転制御を行っている状態で、光エンコーダ16によって操作部1の回転が検知されない場合に、超音波モータ14の駆動を停止させるとともに、所定の場合に、停止させた超音波モータ14の駆動を再開させる制御を行うMPU20aとを備える。
(もっと読む)
シフトレバー装置
【課題】シフトレバー上部の操作スイッチの操作で車体側の制御を確実に行なえると共に、構成部品の磨耗や損傷を防止できるシフトレバー装置を提供する。
【解決手段】シフトレバー3の上部に装着され、操作スイッチ5を有するノブ2と、このノブ2に内蔵され、操作部5aの操作に応じてシフトレバー3の軸方向に移動可能な磁性体60と、シフトレバー3のレバー本体30の上端に設けられると共に、車体側端子80に接続され、磁性体60の近接、離間を検知する磁気検知体7とを備えた。
(もっと読む)
制御装置の製造方法
【課題】従来のジョイスティックよりも頑丈であり、性能が劣化せず、苛酷な環境内でも、高い信頼性が得られるようにする。
【解決手段】制御装置を形成する方法は、金型内に磁石およびシャフトを位置決めするステップと、磁石およびシャフトのまわりに、亜鉛をダイキャストするステップとを備えている。磁石は、C字形をした本体に沿って、スロットを形成する両端部を有する焼結されたC字形のものである。金型内に回転防止ピンを位置決めし、このピンの少なくとも一部を、スロット内に挿入する。磁石、シャフトおよび回転防止ピンのまわりに、亜鉛をダイキャストする。
(もっと読む)
操作装置
【課題】節度感を有する単一操作と、一定の操作感を有する連続操作を、任意に選択可能な操作装置を提供する。
【解決手段】節度装置9は、軸13に設けられた連動部材15と、応動部材17と、節度用負荷部18と、抵抗用負荷部23と、電磁石14xとを備えている。節度用負荷部18は、節度用コイルばね19及び節度用押圧部材20を有し、節度用コイルばね19のばね力により、節度用押圧部材20を連動部材15の節度用凹面部16に対して押圧し、電磁石14xの通電時に節度を与える。また、抵抗用負荷部23は、抵抗付与用コイルばね24及び抵抗付与用押圧部材25を有し、抵抗付与用コイルばね24のばね力により、抵抗付与用押圧部材25を非回動部状態に設けた抵抗付与用凹面部22に対して押圧し、電磁石14xの断電時に操作抵抗を与える。さらに、切替えスイッチと制御装置によって、電磁石14xの通断電状態を任意に切り替える。
(もっと読む)
作業支援装置
【課題】作業機と作業対象との間の詳細な位置関係を、容易且つ明瞭に把握できるようにする。
【解決手段】把持装置11から作業対象80までの距離を検知する距離センサ21と、運転者の触覚に作用して、運転者に距離の情報を伝える距離伝達手段3と、距離伝達手段3を制御する第1制御部41と、を備える。距離伝達手段3は、把持装置11を動作させるための操作レバー12に設けられており、且つ、運転者に接触して、当該運転者の触覚に作用するように動作する円板(接触部)31を有する。第1制御部41は、円板31による触覚への作用を、距離センサ21で検知された距離の長さに関連させて変化させる。
(もっと読む)
操作装置及び移動体
【課題】移動体の移動に伴って操縦者が受ける力に起因して操作装置に誤った指示が入力されること。
【解決手段】ジョイスティック10(操作装置50)は、ロボットを操作する操作装置である。ジョイスティック10は、操縦者によって把持されるレバー12を備え、レバー12は、レバー12が直接的又は間接的に取り付けられるアーム部材30に交差する軸線を回転軸として回動可能である。レバー12には、ロボットの空間移動を操作するコントロールボタン13が設けられている。ロボットの空間移動を操作するコントロールボタン13をレバー12に設ける。レバー12に設けられたコントロールボタン13の操作によってロボットに対して空間移動を指示することができる。ロボットの移動に伴って操縦者が受ける力に起因してジョイスティック10に誤った移動指示が入力されることを抑制することができる。
(もっと読む)
操作装置
本発明は差動機能を組み入れた駆動機能を入れたり/外したりするための自動車(50,150,250)用の操作装置(I,II,III)に関するものであり、前記操作装置は駆動機能を入れたり/外したりする切り替え手段であって、回転運動によって少なくとも一つの駆動機能を入れたり/外したりする回転可能な切り替え手段(30,130,230)からなる切り替え手段を含み、前記切り替え手段は前記回転とは相違する運動によって少なくとも一つの別の駆動機能を入れたり/外したりする設備(30,140,240)を付属させている。本発明はまた、自動車にも関する。 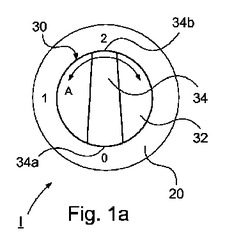 (もっと読む)
(もっと読む)
操作装置
【課題】簡単な構成にて操作スイッチ及びレバーの操作時に複数種類の動作を行うことができるようにすること。
【解決手段】ジョイスティック34は、互いに直交するX軸方向及びY軸方向に自由度を有するレバー35と、第1ポテンショメータ36と、第2ポテンショメータ37と、レバー35の上端部に設けられた押しボタンスイッチ38とから構成されている。そして、第1ポテンショメータ36と、第2ポテンショメータ37と、押しボタンスイッチ38は、車両制御装置29と電気的に接続されている。車両制御装置29には、CPU44、メモリ45とが設けられている。メモリ45には、マップが記憶されており、CPU44は、押しボタンスイッチ38が押されているときに、第1ポテンショメータ36及び第2ポテンショメータ37からの操作量検出信号とマップとに基づいて、CPU44に揚高自動停止動作及び水平自動停止動作をON又はOFFさせる。
(もっと読む)
車両用操作装置
【課題】操作性を向上する。
【解決手段】操作ノブ80と、操作ノブ80より受ける押圧力に応じた信号を出力するプッシュスイッチ55と、操作面に沿って操作ノブ80とともにプッシュスイッチ55を移動可能に支持するX方向スライダ50、Y方向スライダ40と、を備え、操作ノブ80は、操作面に対する鉛直方向への押圧力を受けると鉛直方向に移動してプッシュスイッチ55に押圧力を伝達するように構成されている。
(もっと読む)
1 - 20 / 31
[ Back to top ]