
Fターム[3J552PA36]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 車両関係 (1,319) | 降坂走行性能 (35)
Fターム[3J552PA36]に分類される特許
1 - 20 / 35
車両の運動制御装置
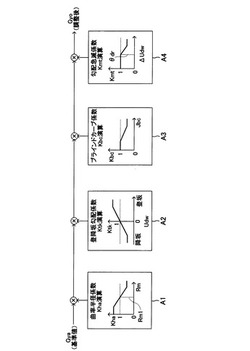
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
惰行制御装置

【課題】車両の過度な加速を防ぐことのできる惰行制御装置を提供する。
【解決手段】車両惰行時に、エンジンから駆動輪への動力の伝達を切断して燃料消費を低減させる惰行制御装置において、車両惰行時であり、且つ、エンジンから駆動輪への動力が伝達されているときに、前記動力の伝達を切断したときの車両加速度を推定し(ステップS7)、この車両加速度が予め設定した所定値以下のとき前記動力の伝達を切断するコントローラを備えたものである。
(もっと読む)
車両用変速制御装置
【課題】アクセルオフ操作時に常に最適ギヤ比へのシフトダウンを行って適切なエンジンブレーキ作用を発生できる車両用変速制御装置を提供する。
【解決手段】補助ブレーキ切換スイッチの切換位置及び車速Vに基づき、目標制動力算出部31で実際に発生させるべき目標制動力tgtBを具体的に算出し、その目標制動力tgtBを達成可能な目標ギヤ段tgtGを目標ギヤ段算出部32で算出してシフトダウンを行う。目標制動力tgtBの算出時には、スイッチ切換位置がSDB弱位置のときに比較してSDB強位置ではより大きな目標制動力tgtBを算出し、より低ギヤ側の目標ギヤ段tgtGにシフトダウンすることによりエンジンブレーキ作用を高める。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
(もっと読む)
自動変速機の制御装置
【課題】登降坂路を走行する車両の走行状態に応じた適切なプレシフト制御を実行できる自動変速機の制御装置を提供する。
【解決手段】ECUは、車両が登坂路を走行中であると判定した場合(ステップS12が肯定判定)、運転手から加速要求がなされる可能性が高いか否かを判定する加速要求判定処理を実行する(ステップS13)。そして、ECUは、運転手が加速を要求する可能性が高いと判定した場合(ステップS14が肯定判定)、ダウンシフト側へのプレシフト制御を実行する(ステップS15,S20)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】下り坂のコースト走行時などに、目標減速駆動力を得ることを可能としながら、バッテリの過充電を防止可能とする有段変速機を備えたハイブリッド車両の制御装置を提供すること。
【解決手段】コースト走行状態で、必要な目標減速駆動力が得られるように、モータ/ジェネレータMGを回生動作させるとともに、自動変速機ATの変速比を制御する減速走行制御を実行する統合コントローラ10を備え、この統合コントローラ10は、減速走行制御の実行時に、バッテリ充電量が、あらかじめ設定された第1閾値を越えた際に、自動変速機ATの変速比を、目標減速駆動力よりも大きなエンジンフリクションが得られる充電量高時変速比とするとともに、HEVモードでモータ/ジェネレータMGを力行動作状態として、バッテリ4の放電を行なうHEV放電処理を実行することを特徴とするハイブリッド車両の制御装置とした。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】登降坂路におけるドライバビリティのより一層の向上を図る。
【解決手段】アクセルオフ状態でハイブリッド自動車が比較的急な降坂路を走行しているときに、回転数Nm2の算出に関連したエイリアシングが発生していないと判断された場合、実加速度と推定加速度とに基づく路面勾配θに対応した勾配起因シフトレンジSRgが制御用シフトレンジSR*として設定され(S230)、当該エイリアシングが発生していると判断された場合には、制御用シフトレンジSR*が前回値に保持される(S240)。これにより、上記エイリアシングが発生していると判断されたときには、エイリアシングが発生していると判断される直前に求められた路面勾配θに対応した勾配起因シフトレンジSRgに基づいてエンジン22とモータMG1およびMG2とが制御される。
(もっと読む)
自動変速機を制御するための方法
【課題】本発明は、自動車に取り付けられ、複数の前進ギヤと、少なくとも1つの後進ギヤ(G_バック)とを備え、選択レバーによって異なる走行レンジ(P,R,N,D)が選択され得る自動変速機を制御する。
【解決手段】パーキングレンジPにおいて、自動車1が坂を上るように方向付けられている場合は、前進ギヤG1にギヤ入れして保持し、自動車1が坂を下るように方向付けられている場合は、前進ギヤG1の代わりに、後進ギヤG_バックにギヤ入れして保持する。
(もっと読む)
車両の制御装置
【課題】自動変速機の係合要素の係合油圧の学習がダウンシフト時に良好に行なわれる車両の制御装置を提供する。
【解決手段】車両の制御装置は、複数の変速段を減速側にシフトさせるダウンシフト指示を入力するための入力部であるシフトレバー8004と、入力部からのダウンシフト指示に応じて自動変速機の変速を制御するECU8000とを備える。ECU8000は、ダウンシフト指示に応じて原動機の出力を増大させ、複数の係合要素のうちの第1の係合要素の係合油圧を制御パラメータに基づいて変速を進行させ、原動機の出力を減少させ、変速の進行度合いに基づいて制御パラメータを学習する。
(もっと読む)
ハイブリッド車両
【課題】デュアルクラッチ式変速機を備えたハイブリッド車両がクロール走行を行う場合に、摩擦ブレーキ装置の負荷を軽減可能な、ハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1は、機関出力軸8と第1変速機構30の第1入力軸27とを係合可能な第1クラッチ21と機関出力軸8と第2変速機構40の第2入力軸28とを係合可能な第2クラッチ22とを有している。ECU100は、クロール走行を行う場合、第1クラッチ21を係合状態にして、機関出力軸8からの機械的動力を第1変速機構30により変速して駆動輪に伝達すると共に、第2変速機構40の変速段42,44,46をいずれも選択しない状態にして、第2クラッチ22を係合状態又は半係合状態にすると共にモータ50を発電機として作動させて、駆動輪88R,88Lに回生制動トルクを作用させる。
(もっと読む)
シフト制御装置、シフト制御方法およびシフト制御プログラム
【課題】短い区間のみ勾配が変化する箇所において不要なシフトチェンジが発生することを防止し、勾配変化後に所定の勾配が継続する箇所においては速やかにシフトチェンジすることができる技術を提供する。
【解決手段】車両の前方の第一地点における勾配を示す情報を取得し、前記第一地点と、前記第一地点からさらに前方にある第二地点との間の平均勾配を示す情報を取得し、前記第一地点における勾配と、前記第一地点から前記第二地点までの平均勾配とが共にシフトマップ切り換え条件を満たすとき、シフトマップを切り換える。
(もっと読む)
傾斜センサの出力補正装置
【課題】車両に搭載されて内燃機関の回転を変速する自動変速機の制御に使用される傾斜センサの出力が降坂方向にずれたときにセンサ出力を精度良く補正するようにした傾斜センサの出力補正装置を提供する。
【解決手段】内燃機関が始動されたときと停止されたときの傾斜センサの出力の差分(IGON補正値)が降坂方向にずれているか否か判断し、降坂側にずれていると判断されるとき、傾斜センサの補正が必要と判断すると共に、差分に基づき、車両が走行するときの予想加速度と検出加速度の差分の平均値から算出される車両が走行する走行路の傾斜を示す加速度学習値を補正し(S100からS112)、補正された加速度学習値によって傾斜センサ78の出力を補正する(S114)。
(もっと読む)
車両用変速機の変速制御装置
【課題】エンジンと変速機とを搭載し、シフトマップにより自動的な変速機制御を行う車両において、車両走行状態に適合する変速を実行し、かつ、車両の減速時には運転者の意図するエンジンブレーキの制動力を確保する。
【解決手段】車速とエンジンのアクセル開度とに対応して変速段を決定するシフトマップを備えた変速機制御装置に、アクセルペダルとブレーキペダルの操作状況に応じて加速モード期間と減速モード期間とを判別するモード判別手段を設ける。運転者がブレーキペダルを踏み込んだ後の減速モード期間では、シフトアップを禁止(S9)するとともにシフトダウン用マップの変速段領域を車速の増大方向に補正(S2,S3)してシフトダウンを早めに実行する。これにより、減速モード期間において車両にはエンジンブレーキの制動力が十分に作用し、運転者のブレーキペダルの操作頻度を減少できる。
(もっと読む)
車両用無段変速機の制御装置
【課題】車両の降坂走行時において運転者の運転意図に応じた好適なダウン変速を実現する車両用無段変速機の制御装置を提供する。
【解決手段】エンジン12と駆動輪24との間の動力伝達経路に設けられて、そのエンジン12から出力される駆動力を連続的な無段階の変速比により変速して前記駆動輪24へ伝達することができる無段変速機18の制御装置において、車両の降坂走行時の制動操作に応答して前記変速比γを大きくする降坂制動走行制御を実行すると共に、その降坂制動走行制御の実行中に更に制動操作が検出された場合には、前記変速比γを更に大きくする第2の降坂制動走行制御を実行するものであることから、運転者による制動操作に応じたダウン変速制御によって必要十分なエンジンブレーキを効かせることができる。
(もっと読む)
車両の変速装置のシフト制御のシステム及び方法
車両の変速装置のシフト制御のシステム及び方法。変速装置は、指定された変速装置の変速点でギヤをシフトする。車両が直面した道路の勾配の傾斜が変化すると、変速装置の変速点が、より良い車両性能を提供するように変化される。1つの実施形態によれば、道路の傾斜が、車両の加速度及びペダルの踏み込みによって生じる加速度に基づいて計算される。こうした実施形態では、ブレーキ表示は、ブレーキ信号のスイッチを使用することなく、同じ道路の傾斜の計算から計算される。ブレーキの適用が、道路の傾斜の計算によって表示されると、変速装置のシフティングが、弱い車両性能を防止するように調整される。 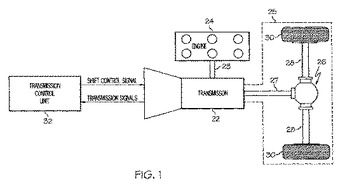 (もっと読む)
(もっと読む)
四輪駆動車の動力伝達装置
【課題】 簡素な構成であって、主駆動輪の回転速度に対する従駆動輪の回転速度を増速するまたは減速する四輪駆動車の動力伝達装置を提供する。
【解決手段】 本発明は、主駆動輪車軸と従駆動輪車軸との間の駆動力伝達系に設けられた変速機構100とを有する四輪駆動車の動力伝達装置であって、変速機構100は、主駆動輪側の駆動力伝達系に連結された入力軸102と、従駆動輪側の駆動力伝達系に連結された出力軸104と、第1および第2のプラネタリギヤセット106、108と、1つのクラッチ110と、正駆動時用および逆駆動時用ブレーキ112、114とから構成され、クラッチ110を完全締結して入力軸102と出力軸104とを直結するとともに、クラッチ110およびブレーキ112、114の一方の締結力を制御して入力軸102と出力軸104の回転速度比を制御する。
(もっと読む)
無段変速装置
【課題】手動変速モード時の各変速段に対応する変速比特性を運転者の好みに合わせて選択可能にする。
【解決手段】手動変速モード時のシフトパターンとして、通常のDシフトパターンと、このDシフトパターンに対して全体の固定変速比特性をローギヤード側へ設定したDsシフトパターンとが記憶されおり、運転者がマニュアルモードスイッチをオンすると、セレクトレバーのレンジ位置を検出し(S3,S4)、DレンジにセットされているときはDシフトパターンを選択し(S5)、DsレンジにセットされているときはDsシフトパターンを選択し(S6)、選択されたシフトパターンに基づきアップシフト或いはダウンシフトにより選択した変速段に対応する固定変速比を目標変速比として固定する。
(もっと読む)
自動変速機の変速制御装置
【課題】本発明は、降坂路走行時におけるダウンシフト制御を解除するタイミングを、坂の勾配量に応じて変化させ、精度の高い降坂路制御を実現し、運転性を向上し得る自動変速機の変速制御装置を実現することを目的としている。
【解決手段】このため、スロットル開度検出手段と、路面勾配検出手段と、スロットル開度が全閉で、かつ路面勾配量が勾配方向に設定勾配量より大きいときにダウンシフト制御する変速制御手段とを備えた自動変速機の変速制御装置において、変速制御手段はダウンシフト制御実施中のアクセル踏み込みによりダウンシフト制御を解除するダウンシフト制御解除手段を備え、ダウンシフト制御解除手段はスロットル開度が設定値を超えた場合あるいは設定値を超えた状態が所定時間継続した場合に開始され、この設定値は路面勾配量により変更される。また、設定値は路面勾配量が大きいほど小さい値に設定される。
(もっと読む)
マニュアルモード付き無段変速装置
【課題】部品点数を増やすことなく、マニュアルモード時の変速比を素早く可変設定するマニュアル有段変速処理と、変速比を任意に設定するマニュアルリニア変速処理とを自在に選択できるようにする。
【解決手段】セレクトレバー43をサブゲート44b側へ移動させてマニュアルモードスイッチ37をONすると、現在の変速比εが固定変速比ε1として固定される(S4)。そしてアップシフトスイッチ35a或いはダウンシフトスイッチ35bのON時間Tcが短押し判定時間Toよりも短い場合はマニュアル有段処理が実行され(S10)、又ON時間Tcが短押し判定時間Toを越えたときはマニュアルリニア変速処理が実行される(S9)。
(もっと読む)
1 - 20 / 35
[ Back to top ]