
Fターム[4C061HH21]の内容
Fターム[4C061HH21]の下位に属するFターム
Fターム[4C061HH21]に分類される特許
41 - 60 / 174
内視鏡先端フード

【課題】様々な径の処置具を安定的に保持する。
【解決手段】内視鏡先端フードは外殻とバルーン固定部12を有する。バルーン固定部12を外殻内面に固定する。バルーン固定部12に鉗子口側から先端側の開口まで延びる孔部14を形成する。孔部14に円筒形状のバルーン15を固定する。バルーン15にチューブ16を接続する。チューブ16を介してバルーン15に充填材を加圧する。充填材が加圧されたバルーン15は孔部14の中心軸方向に膨張する。中心軸方向に膨張するバルーン15が処置具を保持する。
(もっと読む)
内視鏡先端フード

【課題】様々な径の処置具を安定的に保持する。
【解決手段】処置具保持部12は第1、第2の弾性体13a、13bおよび硬質体14を有する。第1、第2の弾性体13a、13bを互いに対向させたままテーバー部内面に固定する。第1、第2の弾性体13a、13bに互いに対向する溝部15を形成する。溝部15を鉗子口側から先端側の開口まで延ばす。溝部15の内面に硬質体14を設ける。使用が想定される処置具の外径より硬質体14の間隔を短くさせる。
(もっと読む)
医療用マニピュレータシステム
【課題】所望の部位に対する処置に費やされる時間を従来に比べて短縮可能な医療用マニピュレータシステムを提供する。
【解決手段】本発明の医療用マニピュレータシステムは、細長な管路の内部に挿通可能な形状を具備し、1または複数の屈曲部が設けられた医療用器具と、屈曲部を屈曲させるための駆動力を供給する屈曲用アクチュエータと、屈曲用アクチュエータを制御するためのアクチュエータ制御部と、管路の内部に設けられ、屈曲部が通過したことを検知した際に検知信号を出力する検知部と、検知信号が入力された際に検知した屈曲用アクチュエータの動作量に基づき、検知部を通過した屈曲部の屈曲状態と屈曲部を屈曲させるための操作が可能な操作部の操作状態とを整合させるための演算を行う演算部と、を有する。
(もっと読む)
内視鏡用処置具及び内視鏡
【課題】表層近くの生体組織を処置し易い状態に掻き寄せるのに適した内視鏡用処置具及び内視鏡を提供する。
【解決手段】超音波内視鏡5Cのアーム用ルーメン内に移動自在に収納されたアーム部2の先端には鍬状爪部3が形成されており、対物レンズ45による観察及び超音波振動子部10による観察のもとで、臓器21の表層付近の病変部23を観察し、その生体組織を採取しよとする場合、病変部23の向こう側に設定した鍬状爪部3を、手元側のアームスライダの操作で超音波振動子部10が形成された凸部11側に掻き寄せ、この凸部11とで病変部23を挟持する様に固定することにより、生体組織の採取や、高周波電流での切除等の処置を行い易い状態に設定する。
(もっと読む)
カプセル型医療装置および医療システム
【課題】被検体内部の体内部位の生体組織を採取できたか否かを生体組織採取時に確認できること。
【解決手段】本発明にかかる医療システム11は、被検体1の体内に導入されるカプセル型医療装置2と、被検体1内部のカプセル型医療装置2と無線通信を行う通信部3と、カプセル型医療装置2によって撮像された体内画像等を表示する表示部4と、この表示部4等を制御する制御部10とを備える。カプセル型医療装置2は、被検体1の体内部位の生体組織を採取する一連の採取動作を行うとともに、生体組織採取の成否を示す成否情報を外部に無線送信する。制御部10は、通信部3を介してカプセル型医療装置2からの成否情報を取得し、この取得した成否情報を表示部4に表示させる。
(もっと読む)
カプセル医療システム
【課題】被検体内部の所望の生体組織に対して処置を行うカプセル型医療装置の処置部と処置対象の生体組織とを高精度に位置合わせすることができること。
【解決手段】本発明にかかるカプセル医療システム11は、被検体1内部に導入されるカプセル型医療装置2と、カプセル型医療装置2が無線送信した情報を受信する体外通信部3と、カプセル型医療装置2が撮像した体内画像等を表示する表示部4と、各種情報を入力する入力部8と、制御部10とを備える。カプセル型医療装置2は、被検体1内部の生体組織に対する処置を行う処置手段を備え、磁気誘導部5の外部磁界によって誘導される。制御部10は、表示部4に表示された体内画像の中から入力部8によって選択された処置対象と前記処置手段との相対距離を決定し、前記外部磁界を制御して前記相対距離だけカプセル型医療装置2を移動させる。
(もっと読む)
内視鏡用高周波処置具
【課題】内視鏡の処置具挿通チャンネル内に高周波処置具を挿入している状態で、給液及び吸引の各操作を円滑かつ確実に行えるようにする。
【解決手段】可撓性シース2はマルチルーメンチューブから構成され、その中央に設けた通路は第1の通路14であって、この第1の通路14にはケーブル11と電極部材13とから構成される処置具本体10が挿通され、この第1の通路14の周囲には複数の通路が形成されており、これら第1,第2の通路14,15は第1,第2の接続通路25,26と連通しており、第1の接続通路25には給水手段30が、また第2の接続通路26には吸引手段34が接続されている。
(もっと読む)
光ファイバ検出構成要素を有するガイドワイヤ及び送達カテーテル、並びに関連システム及び方法
診断もしくは治療処置、物質又は機器を、ヒト又は動物被検者の身体内に位置する標的領域に送達するための方法、システム、及び機器である。組織穿通カテーテルは、標的領域付近の身体管腔内に位置決めされる。次いで、中空の穿通器が組織穿通カテーテルから前進させられ、身体管腔から穿通され、身体管腔で穿通カテーテルは標的領域の方向に組織の中に位置決めされる。その後、細長い光学機器(例えば、光学的に装備されたガイドワイヤ又はカテーテル)が中空の穿通器を通って前進させられ、標的領域の方向に組織を通って前進し続けされる。細長い光学機器は、光学処理機器(例えば、分光計)に接続され、この機器は、細長い光学機器がいつ標的領域に入ったかを表示する光学的に測定されたデータ(例えば、スペクトル反射、pH、酸素濃度、温度)を提供する。次いで、細長い光学機器が、標的領域の中への診断もしくは治療モダリティ、物質又は機器の送達を促進するために用いられる。 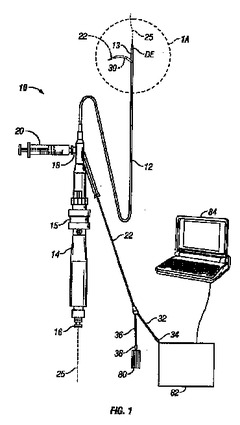 (もっと読む)
(もっと読む)
回転状態検出方法および装置
【課題】術具の回転状態を一目で把握でき、術具の操作を容易にするとともに、安全性を向上する。
【解決手段】医療用内視鏡システムの挿入手段3には、内視鏡レンズ6を設けた内視鏡挿入部2'と、術具部4を設けた可撓伝達部1'を内挿し、可撓伝達部1'の他端には術具部4を操作する操作端1を設けている。可撓伝達部1'の術具側には三角形など連続した模様のマーカ5が周方向に1回り分、設けてある。内視鏡2は術具部4の画像と共にマーカ画像を読み取り、画像処理装置8はマーカ画像を画像処理して基準位置からの回転角を求め、その回転角に応じた矢印を術具画像に付与して表示する。術具部4の可撓伝達部1'に捩れが生じても、一目で術具の動作方向を認識できるので、操作が容易になる。
(もっと読む)
検査システム及び検査支援装置並びに検査方法
【課題】検査スタッフに手間を掛けさせることなく、適正ではない処置具の使用にともなう医療事故を確実に防止する。
【解決手段】プロセッサのCPU106は、検査開始が指示されると、対象となる患者の患者情報を情報管理サーバ14から読み出す。CPU106は、その患者情報を基に対象患者に該当する禁忌情報120aを禁忌情報DB114から読み出す。禁忌情報120aを読み出したCPU106は、トップトレイに載置された各処置具60のRFIDタグに記憶された種別情報84aをタグリーダ80によって読み取る。CPU106は、禁忌情報120bと各種別情報84bとを基に、トップトレイに載置された各処置具60の使用が禁止されているか否かを判定する。そして、使用が禁止されている処置具60があると判定すると、その処置具60を対象患者に対して適正ではないと判断し、報知を行なう。
(もっと読む)
処置用内視鏡
【課題】滅菌作業が行いやすく、高い清潔度を確保して手技を行うことができる処置用内視鏡を提供する。
【解決手段】本発明は、可撓性を有し、湾曲操作が可能なシースと、シースの先端から突出して湾曲操作が可能なアーム部302A、302Bと、処置具を内部に挿通可能に形成され、操作者がアーム部302A、302Bを湾曲させるときに操作する操作スティック1354A、1354Bと、操作スティック1354A、1354Bに着脱自在に挿通され、処置具が挿通される第1チャンネルを有するチャンネルユニットとを備える処置用内視鏡1300である。
(もっと読む)
処置用内視鏡
【課題】滅菌作業が行いやすく、高い清潔度を確保して手技を行うことができる処置用内視鏡を提供する。
【解決手段】本発明は、可撓性を有し、湾曲操作が可能なシースと、シースよりも先端側を観察する観察手段と、シースの先端から突出して湾曲操作が可能なアーム部302A、302Bと、アーム部302A、302Bを操作するための操作部1350と、アーム部302A、302B及び操作部1350に接続され、操作部1350の操作をアーム部302A、302Bに伝達する伝達部材とを備えた処置用内視鏡1300であって、伝達部材は、着脱自在に操作部302A、302Bに接続されている。
(もっと読む)
内視鏡本体および内視鏡
【課題】腕部を先端側に有する硬質部に対して観察光学系を容易に着脱可能な内視鏡本体を提供する。
【解決手段】細長く形成された着脱可能な観察光学系200が装着された状態で内視鏡10を構成する内視鏡本体10aの挿入部12の基端部には、分岐部材14が配設されている。分岐部材14は、第1の延出部16と第2の延出部18とを互いに分岐させて、第1および第2の操作部20,22を別に配置するとともに、観察光学系200の先端部の撮像モジュール202を挿入部12の第2の硬質部42に導く入口となる第3の開口部130を備えている。
(もっと読む)
内視鏡装置
【課題】内視鏡の撮像部の破損や誤動作を確実に防止する。
【解決手段】コネクタ21により、内視鏡10とプロセッサ装置11とが接続されると、圧力センサ26は圧力を検知する。操作部15が把持され、判定・給電制御部52で、検知圧力値≧規定圧力値であると判定されると、内視鏡10の使用開始と判定して、撮像部用電源回路53に給電開始信号を出力する。撮像部用電源回路53は、給電開始信号が入力されたことに応答して、CCD17への給電を開始する。検査が終了し、術者が、操作部15から手を離すと、判定・給電制御部52で、検知圧力値<規定圧力値であると判定され、内視鏡10の使用終了と判定して、撮像部用電源回路53に給電停止信号を出力する。撮像部用電源回路53は、給電停止信号が入力されたことに応答して、CCD17への給電を停止する。
(もっと読む)
直腸切除のための直腸断端閉鎖装置
直腸切除手術で使用される外科装置は、直腸断端閉鎖装置1を含み、直腸断端閉鎖装置は、通過開口部10を画定する円形肛門拡張器2と、円形肛門拡張器2の通過開口部10を通して挿入可能となるように構成された肛門鏡3であって、遠位端部18を有する、肛門鏡3と、肛門鏡3に接続され、直腸切除ゾーンを定める栓子装置4、7と、栓子装置4,7から遠位で経肛門的な視覚アクセスを提供するように第1の窓開口部23を画定する肛門鏡の遠位端部18と、肛門鏡3の遠位端部18に堅くリンクされた遠位プレート6と、を備え、遠位プレート6は、栓子装置4、7の直腸切除ゾーンから遠位に配列された拡大部分58を有しており、拡大部分58から遠位の領域への直接的な視覚アクセスを提供するように第2の窓開口部60を含む。  (もっと読む)
(もっと読む)
内視鏡
【課題】操作部の内部空間内で屈曲させられた弾性材料からなる処置具挿通用チューブの内部空間を、処置具が挿入部の基端部に固定した固定用筒状部材によって妨げられることなく円滑に通過できる内視鏡を得る。
【解決手段】挿入部12の基端部に固定した固定用筒状部材25の少なくとも処置具挿通用チューブ33と対向する部分27を弾性材料により構成した。
(もっと読む)
喉頭鏡システム及び喉頭鏡
【課題】操作性が良く、撮影画像を表示する画面が見やすい喉頭鏡システムを提供すること。
【解決手段】喉頭鏡システム10を、挿管用の喉頭鏡11と、受信装置12とから構成する。喉頭鏡11の挿入部14の先端部14aに、撮像部19と照明部20とを設ける。撮像部19が撮像した被観察部位の画像信号は送信アンテナ33から電波として発信する。送信アンテナ33は、把持部15の先端部15bに内蔵する。受信装置12は、電波を受信し、表示部37に撮影画像を表示する。
(もっと読む)
内視鏡用高周波処置具
【課題】可撓性外套管の先端部分に形成された湾曲部を導電性の操作ワイヤとの間の電気絶縁や強度上の問題等が発生することなく遠隔操作により安全に屈曲させることができる内視鏡用高周波処置具を提供すること。
【解決手段】外力により屈曲自在な湾曲部2を可撓性外套管1の先端付近の部分に形成すると共に、導電性の操作ワイヤ7を囲む状態に可撓性外套管1内に挿通配置された電気絶縁性の操作用可撓性チューブ8の先端を湾曲部2の先端付近に連結して、操作用可撓性チューブ8を基端側から操作することにより湾曲部2が屈曲するようにした。
(もっと読む)
医療機器システム
【課題】体腔内で使用される医療機器21、22間の接触を早期に検出し、医療機器の破損等を防止することができる医療機器システム1を提供する。
【解決手段】体腔内で使用され、表面が導電性を有する第1及び第2の医療機器21、22と、第1の医療機器の表面と電気的に接続された第1の電極21Eと、第2の医療機器の表面と電気的に接続された第2の電極22Eと、第1の電極21Eと第2の電極22Eとの間の機器間抵抗値を計測する抵抗計測手段37と、機器間抵抗値の下限閾値を記憶する閾値記憶手段36と、前記機器間抵抗値が前記機器間抵抗閾値より低い場合に医療機器が接触したと判断する判断手段34と、警告を発生する警告発生手段35とを有する。
(もっと読む)
処置具操作装置及び処置具操作装置を備える医療システム
【課題】取付時離間距離、及び最大移動距離等が異なる処置具の操作部を処置具操作装置の操作部取付部に取り付ける際、操作部取付部の取り付け位置を、取り付けられる処置具の操作部に一致させる調整作業を行うことなく、操作部の操作部取付部への取り付けを行える処置具操作装置を提供すること。
【解決手段】処置具操作装置50は、各処置具2、3、4の備える処置部2c、3c、4bを操作する操作部2h、3h、4hを駆動するためのラック54と、このラック54にに設けられ、各処置具2、3、4の操作部2h、3h、4hが取り付けられる操作部取付部52と、ラック54の駆動を制御する制御装置20とを備えている。そして、操作部取付部52には、この操作部取付部52に操作部2h、3h、4hが取り付けられる際に、制御装置20に処置具2、3、4の取り付けが開始されたことを告知する取付開始信号を出力するRFIDリーダ59を備えている。
(もっと読む)
41 - 60 / 174
[ Back to top ]