
Fターム[4F035BC02]の内容
噴霧制御装置 (2,732) | 放出装置の構造、付属装置 (259) | スプレーヘッドの駆動装置 (168) | 自動駆動装置(例;ロボット)を有するもの (141)
Fターム[4F035BC02]の下位に属するFターム
複数の自動駆動装置の配置 (19)
Fターム[4F035BC02]に分類される特許
81 - 100 / 122
塗装設備及びそれを用いた塗装方法
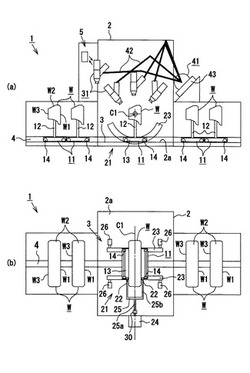
【課題】塗装用ロボットの数が少なくても所望の塗装を行うことができ、しかも塗装室を小型にすることができる塗装設備を提供すること。
【解決手段】本発明の塗装設備1は、塗装室2、ワーク揺動手段21、塗装機31、塗装用ロボット41等を備える。塗装室2には、ワーク支持体11により支持されたワークWが搬入される。ワーク揺動手段21は塗装室2に設置されている。ワーク揺動手段21は、塗装室2内に搬入されたワークWを、中心軸線C1を揺動中心としてワーク支持体11とともに揺動させる。塗装用ロボット41は、ロボットアーム42の先端に塗装機31を搭載している。塗装機31は揺動するワークWに対して塗料を吹き付ける。
(もっと読む)
塗装システム

【課題】押し出し液を使用することなく、塗装機における塗料の吐出量を的確に制御することができる塗装システムを提供すること。
【解決手段】塗装システムにおいて、静電塗装機2は、塗料バッグ16をチャンバ15内に収納した塗料カプセル14が着脱可能である。静電塗装機2は、その塗料カプセル14の装着時には塗料バッグ16から供給される塗料を吐出して塗装を行う。エアポンプ5は、塗料バッグ16の外表面にエア圧力を作用させるために、エア配管30を介してチャンバ15内にエアを供給する。圧力センサ31は、チャンバ15内にて作用するエア圧力を検出する。コントロールバルブ32,33は、エア配管30の途中に設けられている。制御装置6は、圧力センサ31の検出結果に応じてコントロールバルブ32,33を駆動し、チャンバ15内に供給するエア圧力を調整することで塗料の吐出量を制御する。
(もっと読む)
塗装システム
【課題】 ロボット装置に取付けられた塗装機の共通本体部に対して霧化ヘッド、カートリッジを交換するときに、共通本体部を交換位置に位置決めする。
【解決手段】 ロボット装置13に塗装機14の共通本体部15を取付ける。また、共通本体部把持装置33を霧化ヘッド交換洗浄装置31の固定板32に固定して取付け、共通本体部把持装置33により共通本体部15を把持して位置決めする構成とした。また、共通本体部把持装置33が共通本体部15を把持するときには、ロボット装置13の駆動力を低減し、外力を加えれば共通本体部15を自由に動かすことができるようにする。これにより、共通本体部把持装置33は、ロボット装置13の駆動力に抗して共通本体部15を交換位置Oに正確に位置決めすることができる。
(もっと読む)
塗装システム
【課題】 カートリッジ交換装置の揺動アーム部を円弧動させることにより、載置台と霧化ヘッド交換洗浄装置の交換位置との間でカートリッジを移動する。
【解決手段】 カートリッジ交換装置41は、カートリッジ24を把持するカートリッジ把持機構48Bを備えた揺動アーム部48と、揺動アーム部48を水平面上で揺動する円弧運動部46とを備えている。カートリッジ交換装置41は、カートリッジ把持機構48Bにより載置台42上の充填済みカートリッジ24を把持し、この状態で円弧運動部46により揺動アーム部48を交換位置Oに向けて移動する。これにより、載置台42と霧化ヘッド交換洗浄装置31の交換位置Oに配置された共通本体部15との間で、充填済みカートリッジ24と使用済みカートリッジ24′とを交換することができる。
(もっと読む)
作業補助装置
【課題】対象物を小さな操作力で移動させることができ、かつ対象物が設定された許容範囲を外れた場合でも安定して対象物を許容範囲内へ戻すことができる作業補助装置を提供する。
【解決手段】作業補助装置10は、対象物30を取り付ける多関節アーム11を備える。モータ36が発生するトルクがワイヤ32を介してリンク12aを鉛直上方に引っ張ることで重力によって多関節アーム11が鉛直方向に揺動することを抑制する。各関節14はリンク12が揺動する際の抵抗力を調整可能に付与する抵抗力付与機構16を備える。コントローラ22は対象物が許容範囲50内のときは抵抗力付与機構16が各関節に付与する抵抗力を小さくする。対象物が許容範囲50外のときは抵抗力を大きくする。抵抗力は多関節アーム11の動かし難さを調整するので各関節に付与する抵抗力を大きくしても対象物が操作力の方向とは反対の方向に移動することを防止できる。
(もっと読む)
コンポーネントを製造するための方法および装置
【課題】コンポーネントを製造する方法を提供すること。
【解決手段】この方法は、駆動アセンブリ(116)を位置決めアセンブリ(106)に結合すること、製造される複数のコンポーネントを複数の固定具(110)に結合すること、複数の固定具を、それぞれの固定具が製造されるコンポーネントを受け入れるように構成されている駆動アセンブリに固定すること、および複数のコンポーネントの製造を行いやすくするため位置決めアセンブリを同時に使用して複数のコンポーネントを再配置することを含み、コンポーネントは、駆動アセンブリを介して第1の回転面内で振動し、複数の固定具を介して第2の回転面を通して回転するように構成される。
(もっと読む)
静電塗装装置、及び、静電塗装装置の塗料汚れ防止方法
【課題】塗装ガンと、該塗装ガンを支持するロボットアームを具備する静電塗装装置につき、被塗装物へ向かわずに空中に浮遊する塗料ミストによる前記ロボットアームの汚れを防止するための新規な技術を提案する。
【解決手段】本発明に係る静電塗装装置1は、被塗装物9に対して塗料を噴霧する塗装ガン2と、前記塗装ガン2を前記被塗装物9に対して移動させるロボットアーム3とを具備し、前記塗装ガン2にて塗料(塗料ミスト)に電圧を印加させる構成であり、前記ロボットアーム3(第一アーム部3a)の表面に、前記塗料に印加される電圧と同極性の電圧が印加される構成とする。
(もっと読む)
塗装装置
【課題】塗料の色替機能を有する塗装装置であって、塗料容器から供給されて残存する塗料を塗料容器に還流して回収可能な塗装装置を提供する。
【解決手段】塗装機1の一端は、塗料を噴霧する噴霧口1aを有し、他端は塗装ロボットのアームA先端に接続する。第1塗料容器B1は、アームa内に着脱自在に設置し、各色毎に個別の塗料を収容する。各色毎に個別の塗料を第1塗料容器B1から噴霧口1aに供給する。第1塗料容器B1は、塗料を収容する塗料収容室2a及び溶剤を収容可能な溶剤収容室2bに内部を隔絶する可動弁20と、溶剤収容室2bに溶剤を供給すると可動弁20が移動して塗料収容室2aから塗料が流出する第1開口21と、を備える。第1ピグ1pは第1塗料容器B1から供給されて残存する塗料を第1塗料容器B1に還流して回収する。
(もっと読む)
吹付用アームロボット
【課題】製造コストを低減させつつ、作業員の操作負担を軽減させる吹付用アームロボットを提供する。
【解決手段】基台に旋回自在に軸支された第1のブラケット1と、該第1のブラケット1に起伏自在に軸支された第1のアーム2と、該第1のアーム2の先端に起伏自在に軸支され第2のブラケット3と、該第2のブラケット3に連結された第2のアーム4と、該第2のアーム4に連結された吹付ノズル支持アーム5と、を備え、前記吹付ノズル支持アーム5は、前記第2のアーム伸縮部41に伸縮自在に連結された吹付ノズル支持アーム伸縮部50と、該吹付ノズル支持アーム伸縮部50にアーム軸方向に回動自在に連結された吹付ノズル支持部51と、を備え、自動制御により、前記第2のアーム伸縮部41の先端を基準点BPとして、該基準点BPが前記トンネル坑内の断面における同一平面上を略円運動するように構成する。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
塗装ロボット
【課題】 アームに空気の流れがあたったときの気流の乱れを抑制し、ムラのない品位の高い塗装作業を遂行できるようにする。
【解決手段】 塗装ロボット10のベース部11を最上位の位置に配置し、ベース部11から水平多関節アーム12を垂設し、細長いロッド状で伸縮可能な上下アーム18を水平多関節アーム12の先端部に設け、上下アーム18の下端部に塗装ガン22を設ける。
(もっと読む)
少量排気スプレー塗装処理装置
【課題】
塗装室に吸引されて外部へ排気される空調空気量を削減し、工業的に経済的で、環境保全の側面からも、少ない排気量で可能な塗装室を得ることを目的とし、特に大形の被塗装物であっても少ない排気で塗装を可能とする小形の塗装室を実現する。
【解決手段】
排気装置を備えた塗装室と、予め記憶され設定された作動信号により繰り返し作動を行う塗装ロボットを一体的に塗装ユニットとして構成し、この塗装ユニットを、前記塗装室内を通過する被塗装物に対して必要な塗装位置になるよう制御可能な移動手段によって往復動可能にする。制御手段はサーボアクチュエータ等で塗装ロボットの作動制御と連動させ限定された範囲での塗装を行い、塗装位置に追随する小形の塗装室での塗装を可能とする。
(もっと読む)
フラックス塗布システム
【課題】 1つの噴霧式フラックス塗布装置で、多種類のフラックス塗布方法を実現できるようにすること。
【解決手段】プリント配線板1にフラックスを塗布する噴霧ノズル22を有するフラックス塗布手段18と、水平面における任意の位置に任意の向きでプリント配線板を位置させるロボット搬送手段3と、ロボット搬送手段3によるプリント配線板1の位置と向きで規定されるプリント配線板1の搬送軌跡を制御する制御手段42とを備え、制御手段42によって、プリント配線板1をロボット搬送手段3でフラックス塗布手段18において搬送する場合に水平面における直交する座標の一方の座標での往復移動と他方の座標での直進移動と水平面における向きを組み合わせた搬送軌跡に制御する。
(もっと読む)
少量排気自動塗装システム及び被塗装物フィーダー
【課題】
塗装室特にスプレー用塗装室は、塗料ミストを捕集し被塗装物等への不要な付着を避けるために室内の空気を常に吸引排気処理しているが、その排気のために室内の空調した空気が排気され、膨大なエネルギー損失になっている。塗料ミストの飛散する領域を限定し、ミスト捕集に必要な排気量を削減す。
【解決手段】
塗装室内に配置した被塗装物に対し、塗装ロボットに搭載されて作動するスプレーガンで塗装するにあたり、搬送装置のホルダーに載置された被塗装物の塗装面を、スプレーガンを移動させる代わりに、ホルダー側を前後や回転移動さらには傾斜移動等の手段で制御し塗装を行う。スプレーガンの操作信号と搬送装置のホルダーの駆動とは塗装ロボットの制御装置により任意の設定位置で相互に連動させることで、スプレーガンの吹付けを排気装置に向けて集中させ、小さく排気量の少ない塗装室での塗装が可能となる。
(もっと読む)
塗料吹付圧力制御方法及び塗料吹付圧力制御装置
【課題】 主に塗料の噴出条件が変わったとき、もしくは変化したときに適正な噴霧状態を維持させることができ、これらに対する塗装準備時間を短縮し、生産性の向上を図ることができ、また特別な技術を要さなくても、他の塗装条件から自動的に適正吹付圧力を演算し、制御することができるようにする。
【解決手段】 使用塗料データと噴霧装置30に関わる塗装機器条件データとが入力されると、これらのデータと噴霧装置30の吹付における基準圧力値とを用い、予め噴霧装置30の種類に応じて組み込まれた自動演算手段11による自動演算により、適正吹付圧力値を求め、吹付圧力調整機能を有する電空バルブ20を介しての噴霧装置30の塗料吹付圧力制御が行われるようにした。
(もっと読む)
塗装ロボットによる静電塗装吹付制御方法及び制御装置
【課題】 塗装ロボットにおける自動塗装化において、塗装品質や生産性の基本となる教示の容易化、標準化を可能にし、作業効率を高めることができ、しかも同一の被塗装物における塗装部位毎の微妙な色見調整変更や塗り合わせ調整変更等に容易に対応させることができるようにする。
【解決手段】 ロボット制御装置10により、塗装条件に対する複数の吹付条件を、塗装ロボットに教示される塗装ステップ毎に選択可能に保持し、複数の吹付条件のいずれかに基づき、塗装ロボットの塗装ステップ毎の作動制御とともに塗装機21の吹付条件を制御するようにした。また、塗装ステップ毎の吹付条件の設定が予め記憶された吹付条件値、標準モデルの中から選択できるようにした。
(もっと読む)
塗装制御方法及び塗装制御システム
【課題】 様々な要素に応じた塗装条件の設定を容易かつ自動で行うことができ、しかも作業効率を向上させることができるようにする。
【解決手段】 自動演算手段13の塗装条件演算部13aによる自動演算によって、塗装条件テーブル12に保持されている塗装仕上げの条件に関わる様々な要素を用いての被塗装物毎の最適な塗装条件となる基準値を求め、塗装装置(塗装ロボット)23の作動制御と協動して塗装機による吹付け制御を行うようにした。
(もっと読む)
静電塗装システム及び静電塗装方法
【課題】簡易な構成で安定して塗装することができる静電塗装システム及び静電塗装方法を提供する。
【解決手段】塗料タンクから塗装装置の霧化頭に供給される塗料に高電圧を印加して塗料を噴霧する直接帯電式の静電塗装において、塗料タンク内の塗料を霧化頭に向けて定量供給するための制御用の押し出し液として電気抵抗値の高い純水を使用することにより、簡易な構成で安定して塗装することができる。
(もっと読む)
塗装機器設定装置
【課題】 環境条件の変化によって適切に調節された制御を行う塗装ロボットを提供する。
【解決手段】 塗装ロボット設定装置は、低温時の塗装条件のセットを格納するテーブル、通常時の塗装条件のセットを格納するテーブル、高温時の塗装条件のセットを格納するテーブルを備える。環境の温度に応じて、使用されるテーブルが切り換えられる。
(もっと読む)
液体吐出法を用いた化粧システム及び化粧方法
【課題】 被化粧面に応じて、適正な仕上がりを可能にする。
【解決手段】 被被化粧面のデータを取得する手段と、前記データを処理する処理手段と、前記データを保持する保持手段と、化粧液体を吐出する吐出手段と、を有し、前記データを用いて前記化粧液体を前記被化粧面に液体吐出法によって塗布する化粧システム。
(もっと読む)
81 - 100 / 122
[ Back to top ]