
Fターム[4F035BC02]の内容
噴霧制御装置 (2,732) | 放出装置の構造、付属装置 (259) | スプレーヘッドの駆動装置 (168) | 自動駆動装置(例;ロボット)を有するもの (141)
Fターム[4F035BC02]の下位に属するFターム
複数の自動駆動装置の配置 (19)
Fターム[4F035BC02]に分類される特許
41 - 60 / 122
塗装システム及び塗装システム運転方法
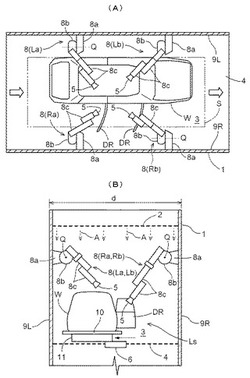
【課題】塗装システムの設備コスト及び運転コストを低減するとともに、省エネルギ化や二酸化炭素排出量の低減を効果的に達成する。
【解決手段】制御手段12による自動塗装において、被塗物Wを移動手段11により両側の塗装ロボット8のうちの一方側の塗装ロボットLa,Lbに近づけて他方側の塗装ロボットRa,Rbから遠ざけた一方寄り塗装位置Lsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる一方寄り塗装工程KLを実行し、その後、被塗物Wを移動手段11により他方側の塗装ロボットRa,Rbに近づけて一方側の塗装ロボットLa,Lbから遠ざけた他方寄り塗装位置Rsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる他方寄り塗装工程KRを実行する構成にする。
(もっと読む)
被覆材料噴霧器およびそうした噴霧器に被覆材料を再供給する方法
本発明のスプレーガン(1)は本体(11)を備えておりかつ本体(11)の近位部(11.1)に収容されており、タンク(10)が主軸線(X10)に沿って延在している。またスプレーガンは、本体(11)の遠位部(11.2)において、通常、噴霧方向(Y50)に被覆材料をスプレーするよう構成された噴霧部材(51)を有する噴霧手段(5)を備える。噴霧方向(Y50)とタンクの主軸線(X10)とは収束するようになっている。 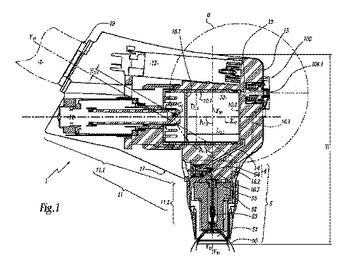 (もっと読む)
(もっと読む)
溶射システム

【課題】ワークに対しプレー管先端位置を適切に補正する溶射システムを提供する。
【解決手段】スプレー管13aを取り付けたロボットアーム11d先端に一対の変位センサー25a,25bを設ける。ロボット駆動制御装置12によりロボット11を駆動しロボットアーム11d先端をワーク表面に沿って走査して一対の変位センサー25a,25bから出力データを受け、出力データに基いてワーク表面形状とワーク表面に対するスプレー管13a先端の位置関係とからスプレー管先端の最適軌跡データを算出する。最適軌跡データに基いてロボット駆動制御装置12によりスプレー管13aを逐次走査し、一対の変位センサー25a,25bからのデータに基いてワーク表面に対するスプレー管13aの角度を求めかつロボットアーム11dの姿勢や位置を補正する補正データを算出しロボット駆動制御装置12によりロボット11を駆動し溶射制御装置14を制御する。
(もっと読む)
成膜装置及び成膜方法
【課題】基板の中央部と周縁部との膜厚のばらつきをより抑制することが可能な成膜装置及び成膜方法を提供する。
【解決手段】本発明の成膜装置は、スプレーノズル6がガラス基板4に液体を噴射する際に、制御部9が、ガラス基板4の周辺部Aから中央部Bまでは、スプレーノズル6を加速させながら移動させる。また、スプレーノズル6が中央部Bに達すると、制御部9は、ガラス基板4の中央部Bでは、スプレーノズル6を等速度で移動させる。さらに、制御部9は、中央部Bから周辺部Cまでは、スプレーノズル6の移動速度を中央部Bでの等速度から減速させる。
(もっと読む)
塗装装置およびそれに関する方法
本発明は構成部品2を塗装するための塗装装置1であって、特に車両本体またはその部分を塗装するための、アトマイザーの位置を定める多軸塗装ロボット6、7と、塗装ロボット6、7を制御するためのロボット制御装置と、そしてロボット制御装置を備えた制御キャビネット8、9とからなるものに関する。本発明は、制御キャビネット8、9を、機械的に塗装ロボット6、7を支える荷重支持形の支柱の形とすることを提案する。本発明は、さらに関連する方法に関する。 (もっと読む)
塗装用ロボット
【課題】必要な塗装ガンに切り換えできる塗装用ロボットを提供する。
【解決手段】ロボット10は、塗料を噴射する第1噴射口11aを先端部に有する第1塗装ガン11、及び塗料を噴射する第2噴射口12aを先端部に有する第2塗装ガン12を筒状のアーム1の先端部に備える。回転軸3は、軸方向がアーム1の長手方向と略直交してアーム1の先端部に回動自在に支持された第1塗装ガン11の基端部、及び第2塗装ガン12の基端部を両翼に取り付けて、第1噴射口11aと第2噴射口12aとを互いに異なる位置に配置する。第1の駆動手段4は、アーム1の内部に配置されて、回転軸3を回動させる。第1の駆動手段4は、第1塗装ガン11又は第2塗装ガンのいずれか一方が被塗装物を塗装可能に回動させる。
(もっと読む)
静電塗装方法及び静電塗装装置
【課題】エア抜きのために塗料供給路に塗料を充填する場合に、充填される塗料量を一定にすることが可能な静電塗装方法及び静電塗装装置を提供する。
【解決手段】色替え弁機構51の塗料供給部側に流体経路122が設けられ、この流体経路122に、排出路58へ導電性塗料を流す際に導電性塗料の流量を計測する光電管56とが設けられ、塗料カートリッジ14から色替え弁機構51を介して導電性塗料を、塗装ガン12へ供給して静電塗装を行う前に導電性塗料の色を替える場合、塗料弁55によって、塗料カートリッジ14内の導電性塗料を排出路58へ流す流体経路122に切り換えて導電性塗料の流量を計測し、次に、塗料弁55を主塗料供給路108側へ切り換え、塗料カートリッジ14から導電性塗料を主塗料供給路108、詳しくは、供給路71に流量計測結果に応じて所定量だけ充填することで主塗料供給路108内のエア抜きを行う。
(もっと読む)
筒体の塗装装置及び塗装方法
【課題】特にジェットエンジンシャフト等のように径に対して長い長さを有する筒体の内表面及び外表面に、小型の装置で一定膜厚の塗装膜を安定して形成できるようにする。
【解決手段】筒体1の表面に一定膜厚の塗装膜を形成する筒体の塗装装置であって、筒体1を水平に支持し且つ筒体1の軸線を中心に回転駆動可能な支持台2と、支持台2に支持した筒体1の表面と間隔を隔てたスプレーガン13,20を筒体1の軸線と平行に移動させて筒体1の表面に塗料を噴射する塗装機3,4と、支持台2を180゜水平旋回可能に支持する旋回台21とを備える。
(もっと読む)
ワークピースを静電的に被覆するための装置及びそのコンタミネイションを減らす方法
コンタミネイションを最小にして、ワークピースを静電的に被覆するための装置(1)の清浄性を改善するために、装置の外側表面が疎水性の且つ硬質のコーティングで被覆される。 (もっと読む)
耐火物吹き付け方法および吹き付け装置
【課題】溶融金属用容器の内壁の位置や形状に応じて、常に好適な位置および角度で耐火物を吹き付けることができる耐火物吹き付け方法および吹き付け装置を提供する。
【解決手段】溶融金属用容器10の内壁の表面形状を計測して容器10内面の展開図上に表示するとともに、耐火物を吹き付けるノズル25の位置および角度をリアルタイムで検出してノズル25による耐火物吹き付け点を算出し、展開図上における吹き付け点を表示器45に表示する。展開図と表示器45とを対比しながらノズル25の位置および角度を調整する。
(もっと読む)
塗装ロボットおよびその運転方法
本発明は、塗装ロボット1により案内されるアトマイザ7により、車両本体の外側に塗装される外面および車両本体の内部に塗装される内面を有する車両本体を塗装するための塗装ロボット1に関する。本発明によれば、この塗装ロボット1は、当該車両本体の外面を塗装するためおよび内面を塗装するために適する。本発明はさらに対応する運転方法にも関する。 (もっと読む)
ワークピースの塗装のための装置
【課題】本発明の目的は、長いワークピースを塗装するためのラッカー装置を提供することである。
【解決手段】本発明は、移動レールに配置され、且つ移動方向に沿ってその上を移動させる少なくとも1つのラッカーロボットを有するワークピースを塗装するための装置に関する。各部分ために、移動レールは、作業面に平行な静止の基準点に対してそれ自体を移動される。本発明はまた、少なくとも1つのラッカー機器を有するワークピースの塗装のためのラッカーキャビンに関し、少なくとも1つのラッカー装置は、その間に作業領域が設けられる2つの互いに対向するポーチ状の開口部を有するラッカーキャビンに関する。ラッカーキャビンは、シャーシは、互いに平行に配置された少なくとも2つのシャーシに支持され、2つのシャーシと共に移動される。本発明はまた、このようなラッカーキャビンによってラッカーで塗装するための方法に関する。
(もっと読む)
エレベーターホール内におけるアスベスト処理溶剤の無人吹付ロボット装置及び無人吹付方法
【課題】 エレベーターホール内に配置し、アスベストの除去作業と封じ込め作業におけるアスベスト処理溶剤の吹付作業を無人で行う、アスベスト処理溶剤の無人吹付ロボット装置と吹付方法の提供。
の提供。
【解決手段】 先端に吹付ノズル4を備え、吹付面に沿ってノズル4を動かす多軸関節ロボット3と、エレベータかご1の外周においてロボット3をエレベーターホール100の内壁面に沿って移動させる移動装置2をエレベーターホール100内に配置し、ノズル4にアスベスト処理溶剤を送り込む圧送ポンプ9と、エレベーターホールの内部構造と、溶剤の吹付け範囲をデータとして有する制御プログラムにより、ロボット3と移動装置2とポンプ9を動作させる制御機構(7,8,11,15)とを備えた吹付ロボット装置により、エレベーターホール内の溶剤吹付作業を無人で行わせる。
(もっと読む)
塗装装置の機能を検査するための試験方法および試験装置
本発明は塗装装置の機能を検査するための試験方法に関し、以下のステップから成る。試験装置を塗装装置に接続すること、試験装置により接続を介して塗装装置のプロセス・パラメータを検出すること、そして、 検出されたプロセス・パラメータに基づき試験装置によって、塗装装置の機能性を検査すること。さらに、本発明は、方法を実施するための対応する試験装置を含む。 (もっと読む)
カートリッジ式塗装システム
【課題】 塗料を無駄なく使用する。
【解決手段】 本発明は、ピストンにより画成された作動液室と塗料室とを備えるカートリッジを有し、作動液室に作動液を供給してピストンを介して塗料室の塗料をカートリッジから押し出して被塗装物に塗装する塗装装置と、カートリッジの塗料室に塗料を充填する充填装置と、カートリッジの作動液室に作動液を供給することによりピストンを介して塗料室の塗料をカートリッジから排出する排出装置とを含む塗装システムであって、塗装中に作動液室に供給した作動液量から塗料の使用量を推定し、また前記塗装前に充填装置がカートリッジの塗料室に塗料を充填して作動液室から排出された作動液量と前記塗装後に排出装置がカートリッジの作動液室に作動液を供給した作動液量との差から塗料の使用量を推定し、2つの推定使用量の大きい方を、充填装置は、前記塗装と同一内容の塗装を実行するときに充填する。
(もっと読む)
シーラ塗布装置
【課題】機器を小型化でき、外力が加えられていない状態で塗布ノズルの姿勢が傾斜するのを防止しつつ、塗布ノズル先端をワークの所定位置に正確に位置決めでき、かつ、塗布ノズルがワークや他の生産設備に干渉するのを防止できるシーラ塗布装置を提供すること。
【解決手段】シーラ塗布装置1は、塗布ノズル35と、緩衝機構40を介して塗布ノズル35を支持する搬送装置10と、を備える。緩衝機構40は、塗布ノズル35を支持する第1の可動部41と、第1の回転軸Xを中心として第1の可動部41を回動自在に支持する第2の可動部42と、搬送装置10の先端に設けられてかつ第2の回転軸Yを中心として第2の可動部42を回動自在に支持する固定部43と、固定部43に設けられて第1の可動部41の姿勢をロックするシリンダ部44と、固定部43に設けられて第1の可動部41を原位置に復帰するように付勢する付勢部45と、を備える。
(もっと読む)
静電塗装装置及び静電塗装方法
【課題】特別な防爆構造を設けることなく開閉物との干渉予測を可能とすること。
【解決手段】静電塗装装置1は、車体2に設けられたドア3をドア開閉装置5により開閉しながらドア塗装ロボット4により静電塗装するように構成される。ドア開閉装置5は、多関節ロボット12と開閉ツール13により構成される。開閉ツール13のドア3と接触する開閉フック18は、絶縁体である樹脂より構成される。多関節ロボット12の第2アーム16は樹脂より構成され、その中に高電圧発生器19が設けられる。高電圧発生器19で発生する高電圧は、第2アーム16、第3アーム17及び開閉ツール13に印加される。第3アーム17には、第3アーム17とドア3との間の放電電流を検出するために電極ピン22と配線23が設けられる。高電圧コントローラ20は、電極ピン22で検出される放電電流に基づいてドア3と第3アーム17との位置関係を判断する。
(もっと読む)
ペインティング用の改良ロボット・システム及びペインティング方法
真空を発生する装置、及び絶縁ラインとキャニスタとの間の接続の上流に配置されたダンプ・ラインを含む、ペインティング・ロボット・システムにおいて、この真空を発生する装置、及びこのダンプ・ラインは、このペインティング・ロボット・システムを充填、及びクリーニングするために使用される。 (もっと読む)
散水装置
【課題】粉塵の発生と拡散を効果的に抑制し、しかもそのためのオペレータの操作負担を最小限にして解体作業の効率、質を確保する。
【解決手段】オペレータにより操作される送信機13からの無線指令に基づくシリンダ制御部16からの制御信号によって電動シリンダ8,9を制御し、この電動シリンダ8,9によって散水ノズル7,7に上下、左右の連続した往復首振り運動を行わせる。また、電磁弁制御部17によって散水/散水停止を制御するようにした。
(もっと読む)
塗料カートリッジ保持構造
【課題】塗料カートリッジ移載装置の構造が簡単になるとともに作業効率が向上し且つカートリッジの塗装装置への接続部を保護可能な塗料カートリッジ保持構造を提供する。
【解決手段】塗料カートリッジ12が着脱自在に装着される塗装ロボット11において、塗装ロボット11に塗料カートリッジ12を覆うカバー部材16を設け、このカバー部材16に、塗料カートリッジ12を交換する際に、塗装ロボット11のカートリッジ装着部15との結合が解かれた塗装カートリッジ12を保持するカバー側カートリッジ把持部64が設けられている。
(もっと読む)
41 - 60 / 122
[ Back to top ]