
Fターム[4F035BC03]の内容
噴霧制御装置 (2,732) | 放出装置の構造、付属装置 (259) | スプレーヘッドの駆動装置 (168) | 自動駆動装置(例;ロボット)を有するもの (141) | 複数の自動駆動装置の配置 (19)
Fターム[4F035BC03]に分類される特許
1 - 19 / 19
塗装システムおよびドア開閉用ロボットの開閉ハンド
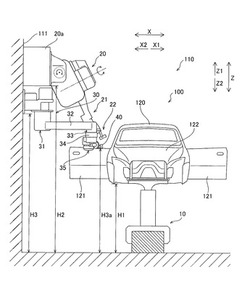
【課題】走行装置を用いることなくドアの内側部の塗装を行うことが可能な塗装システムを提供する。
【解決手段】この塗装システム100は、車体120を搬送するコンベア10と、高さ位置H2に固定的に設置され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の内部を少なくとも塗装する塗装用ロボット20と、高さ位置H2とは異なる高さ位置H3に固定的に設置されるとともに塗装用ロボット20と作業範囲がオーバーラップ可能なように構成され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の開閉およびドア開放状態の保持を行うドア開閉用ロボット30とを備える。
(もっと読む)
ロボット塗装システム及びこれを用いた塗装方法

【課題】被塗装対象に生じる塗装ムラの発生を抑制することができ、塗装のサイクルタイムを短縮することができるロボット塗装システム及びこれを用いた塗装方法を提供する。
【解決手段】ロボット塗装システムは、ロボット及び塗装治具を備えており、塗装治具は、フレーム部30、駆動源33及び複数の塗装ガン4を有している。複数の塗装ガン4A,4B,4Cは、それぞれ一定方向Eに広がる状態で塗料を噴射し、一定方向Eにおいて、塗料の噴射によって形成される中心塗膜層71の両側に、中心塗膜層71よりも塗膜が薄いダスト塗膜層72を形成する。駆動源33は、フレーム部30の形成状態を、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する右斜め方向に並ぶ第1塗装状態と、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する左斜め方向に並ぶ第2塗装状態とに可変させるよう構成されている。
(もっと読む)
液体塗布装置
【課題】液剤塗布における各種の塗布条件や生産数量等に対して、より標準的にシステム化対応する。
【解決手段】基本的な塗布対応構成の塗布ロボット1において、塗布ヘッド9をX方向に駆動させるX軸駆動部7、塗布ヘッドを上下させるZ軸駆動部10、塗布部材5をY方向に位置決めするY軸駆動部8と、Y軸部と一体駆動可能な様に組み付け、塗布部材を回転させるθ軸駆動部11で構成し、塗布部材に対して上記塗布ロボットの各軸を選択して塗布を行う。また、各種の塗布に対しては、塗布ロボットを単体から定ピッチで連結可能な構成とすることによりシステム化対応まで可能となり、塗布部材に対し最適な塗布ができる。また塗布に関連する各種の機能ヘッドにおいても、取付互換性を持たせて選択搭載し、各種塗布部材に対して最適な構成で液剤塗布をする。
(もっと読む)
塗装用ロボットシステム
【課題】複数の塗装工程を一台のロボットで行えるようにし、装置全体の設置面積を縮小することが可能な塗装用ロボットシステムを提供する。
【解決手段】塗装用ロボットシステム10は、ロボットアーム21を有するロボット20と、ロボット20のロボットアーム21の先端21aに取り付けられた支持部材30と、支持部材30に、回動軸J1、J2を中心に回動自在に取り付けられたスプレーユニット40A、40Bとを備えている。各スプレーユニット40A、40Bは、塗料を塗布する複数のスプレーガン51A−53A、51B−53Bを有している。複数のスプレーガン51A−53A、51B−53Bは、それぞれ前記回動軸J1、J2を中心に一体となって回動し、使用するスプレーガン51A−53A、51B−53Bを切り替え可能となっている。
(もっと読む)
塗装システム
【課題】本体と、該本体に対して揺動可能に連結された部材とを有する被塗装物に対して、効率よく塗装を施す。
【解決手段】塗装システムは、下流側の自動車車体14のボンネット22及びトランク26に対して塗装を施す第1塗装ロボット16a、16bと、ボンネット22及びトランク26を開閉するためのオープナーロボット18と、上流側の自動車車体14aの乗員室ドア24a〜24dに対して塗装を施す第2塗装ロボット16c、16dとを有する。第1塗装ロボット16a、16bによる自動車車体14のボンネット22の内側への塗装作業が終了した後、オープナーロボット18が自動車車体14のボンネット22を閉止する。この閉止の間、第1塗装ロボット16a、16bは、自動車車体14のBピラー40a、40bに対して塗装を施す。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
離型剤の塗布装置
【課題】型開き時における金型間のスペースに制約があっても、複数の成形面に離型剤を塗布できるようにする。
【解決手段】塗布装置Aは、駆動装置200に取り付けられるベース部材10と、ベース部材10に着脱可能であって複数のノズル72を有するノズルユニット50と、複数のノズル72における離型剤Rの吐出を個別に制御する複数のバルブ28を備える。複数のノズル72を複数の成形面100M,101Mと対応させ、各ノズル72における離型剤Rの吐出を個別に制御するので、駆動装置200としてレシプロケータを用い、ノズルユニット50を直線的に移動させることができる。直線運動に必要なスペースは、ロボットアームのような三次元的な動きに必要なスペースに比べて小さくて済む。
(もっと読む)
両面同時塗布装置
【課題】電子基板等の上下面に同時にコーディングを施す塗布装置を提供する。
【解決手段】電子基板(1)の両面にコーディング材を塗布する塗布装置において、前記電子基板(1)の表面に第1のコーディング材を塗布する第1の塗布手段(2)と、この第1の塗布手段(2)に相対する位置に配設され、前記電子基板(1)の裏面に第2のコーディング材を塗布する第2の塗布手段(3)と、前記第1の塗布手段(2)および前記第2の塗布手段(3)の間の所定位置に、前記電子基板(1)の表面が前記第1の塗布手段(2)に相対するように前記電子基板(1)を搬送する搬送手段と、前記所定位置に搬送された電子基板(1)に対して、前記第1のコーディング材および前記第2のコーディング材の塗布作業を同時に実行させる制御手段とを備えることを特徴とする。
(もっと読む)
塗装システム及び塗装システム運転方法
【課題】塗装システムの設備コスト及び運転コストを低減するとともに、省エネルギ化や二酸化炭素排出量の低減を効果的に達成する。
【解決手段】制御手段12による自動塗装において、被塗物Wを移動手段11により両側の塗装ロボット8のうちの一方側の塗装ロボットLa,Lbに近づけて他方側の塗装ロボットRa,Rbから遠ざけた一方寄り塗装位置Lsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる一方寄り塗装工程KLを実行し、その後、被塗物Wを移動手段11により他方側の塗装ロボットRa,Rbに近づけて一方側の塗装ロボットLa,Lbから遠ざけた他方寄り塗装位置Rsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる他方寄り塗装工程KRを実行する構成にする。
(もっと読む)
塗装機器および塗装方法
本発明は、塗装剤を用いて部品を塗装する、具体的には塗料を用いて車両部品を塗装する塗装機器および塗装方法に関連し、塗装剤を塗布する塗布装置を備える。本発明によれば、塗布装置は、少なくとも1つの塗装剤ノズルから塗装剤を吐出するプリントヘッド(8、9)である。 (もっと読む)
塗装装置およびそれに関する方法
本発明は構成部品2を塗装するための塗装装置1であって、特に車両本体またはその部分を塗装するための、アトマイザーの位置を定める多軸塗装ロボット6、7と、塗装ロボット6、7を制御するためのロボット制御装置と、そしてロボット制御装置を備えた制御キャビネット8、9とからなるものに関する。本発明は、制御キャビネット8、9を、機械的に塗装ロボット6、7を支える荷重支持形の支柱の形とすることを提案する。本発明は、さらに関連する方法に関する。 (もっと読む)
小型の塗装ブースおよび方法
対象に塗料を塗布するための塗装ブースと、同様に塗装ブースと関連した塗装運転を再設定する方法とが開示される。塗装ブースは、通常コンベヤの経路と平行して配置される一以上のロボット・レールを含むことができ、そしてレールのうちの少なくとも1つに一以上のロボットが置かれる。ロボットは、対象の内外装の表面に第1の塗料層を同時に塗布するように構成されることができる。塗装ブースは、レールのうちの少なくとも1つに置かれ、対象の内外装の表面に第2の塗料層を同時に塗布するように構成された一以上の追加のロボットをさらに含むことができる。 (もっと読む)
ワークピースの塗装のための装置
【課題】本発明の目的は、長いワークピースを塗装するためのラッカー装置を提供することである。
【解決手段】本発明は、移動レールに配置され、且つ移動方向に沿ってその上を移動させる少なくとも1つのラッカーロボットを有するワークピースを塗装するための装置に関する。各部分ために、移動レールは、作業面に平行な静止の基準点に対してそれ自体を移動される。本発明はまた、少なくとも1つのラッカー機器を有するワークピースの塗装のためのラッカーキャビンに関し、少なくとも1つのラッカー装置は、その間に作業領域が設けられる2つの互いに対向するポーチ状の開口部を有するラッカーキャビンに関する。ラッカーキャビンは、シャーシは、互いに平行に配置された少なくとも2つのシャーシに支持され、2つのシャーシと共に移動される。本発明はまた、このようなラッカーキャビンによってラッカーで塗装するための方法に関する。
(もっと読む)
塗装ロボットの配置
本発明は、塗装ブース(10)の中に固定状態で取り付けられた塗装ロボット(12,13,14,15)の配置に係り、この塗装ブースは、仮想垂直平面(20)により、第一の空間領域及び第二の空間領域に分轄され、重複する作業エリアを有する少なくとも二つの塗装ロボットが、前記二つの領域の内の少なくとも一つの中に配置されている。塗装ロボットのそれぞれの基準点は、関係する塗装ロボットの、第一の回転軸と塗装ロボット・ベースとの交点である。各基準点は、塗装位置で塗装される予め定められた対象物の垂直方向で最も高いポイントにより決定される仮想水平平面の上方に配置され、これらの基準点は、垂直方向に、および/または、前記垂直平面に対して直角に、水平方向に、互いに対してオフセットされる(オフセット16参照方)。 (もっと読む)
コーティング設備およびコーティング設備の作動方法
本発明は、複数のコーティング対象1が、コーティング設備を通って順次搬送される搬送経路2、12と、コーティング対象1が処理される複数の処理ステーション13〜17、18〜22、23〜27とから構成されるコーティング設備、特に自動車の車体を塗装するためのコーティング設備に関する。搬送経路2、12が、複数の並列分岐5〜9に分岐し、処理ステーション13〜17、18〜22、23〜27の少なくとも1つが、それぞれの並列分岐5〜9に配置されることが提案される。 (もっと読む)
ジェットプリンティング組合わせ装置
ジェットプリンティング組合わせ装置は、互いに接続するように取付けられるアーム装置と手首装置を備え、アーム装置には頂部噴射装置と側部噴射装置が設けられ、頂部噴射装置は頂部噴射アセンブリーと、頂部噴射センサーと、頂部噴射スプレーガンと、シリンダーとを有し、側部噴射装置は側部噴射アセンブリーと、側部噴射センサーと、側部噴射スプレーガンとを有し、手首装置はロボット手首と、サーボモーターと、エンコーダーコネクタとを備え、該ロボット手首の外部には外部カバーが設けられている。本発明にかかるジェットプリンティング組合わせ装置によれば、一つのアーム装置のみを使用して同時に側部噴射と頂部噴射を実現できるとともに、頂部噴射軌跡と側部噴射軌跡との重合を実現でき、構造が簡単であり、高い作業環境温度と高い鋼巻温度に適応でき、短い圧延周期による時間上の要求を満足できる。 (もっと読む)
塗装用装置
【課題】塗料の飛散等による塗装不良を低減し、塗装工程に掛かる時間を短縮できる塗装用装置を提供する。
【解決手段】被塗装部材26に塗料を噴霧して塗装を行う塗装ロボット20と、搬送路24に沿って被塗装部材26を搬送するための走行軸22aと、被塗装部材26の姿勢を変更するためのアーム22bとを有し、被塗装部材26を把持して搬送する搬送ロボット22と、を備える塗装用装置200により上記課題を解決することができる。
(もっと読む)
離型剤塗布装置
【課題】 型枠の大きさや配置パターンの異なる型枠設置台が順次搬送される状況において、それら型枠設置台の型枠にのみ離型剤を塗布する離型剤塗布装置を提供する。
【解決手段】 この離型剤塗布装置は、搬送中の型枠設置台(2)のIDタグ(11)に記録されている識別情報をIDリーダ(12)によって読み取って、その識別情報に対応する型枠配置情報を記憶手段から読み出し、型枠設置台(2)における型枠部分のみに離型剤を塗布するように、読み出した型枠配置情報に基づいて離型剤噴射器(10)(10)…を制御する。
(もっと読む)
塗布ロボット
【課題】 待機時に塗布剤が固化するのを防止するために使用される溶剤の影響を排除することができる塗布ロボットを提供する。
【解決手段】 モータにより駆動されて塗布剤の瞬時吐出量を制御する塗布装置をロボット先端に取付け、その移動範囲内に塗布剤の固化を防止する溶剤貯留用の貯留槽7を配置して塗布装置5の塗布ノズル5bを貯留槽7内の溶剤内に位置させる一方、塗布ノズル5bが貯留槽7内の溶剤から離脱して塗布開始ポイントに達するまでに、塗布ノズル5bから一定時間あるいは一定量塗布剤を吐出するように構成されている。そのため、塗布作業を開始する時には、塗布ノズル5bの先端に充満した塗布剤に溶剤が染込み、塗布剤の粘度が低くなっていても、この塗布剤が所定位置あるいは空吹き受け槽8内で吐出されるので、その後は所定粘度の塗布剤が吐出され、塗布面を全面に亘って所定厚さに保つことができる。
(もっと読む)
1 - 19 / 19
[ Back to top ]