
Fターム[4L056EA13]の内容
Fターム[4L056EA13]に分類される特許
21 - 40 / 49
糸巻取装置及びそれを備える自動ワインダ
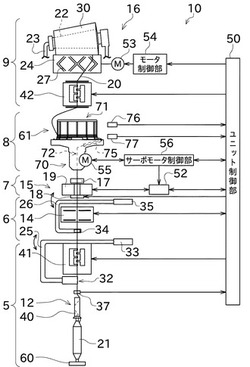
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
糸品質測定器及び糸巻取機

【課題】正確な糸欠点長さ評価及び周期ムラの検出が可能な糸品質測定器及び糸巻取機を提供する。
【解決手段】自動ワインダを構成するワインダユニット10は、クリアラ(糸品質測定器)15を備えている。このクリアラ15は、速度を変化させながら走行する紡績糸20の太さムラを検出し、糸の太さムラの検出を行っている。このとき、糸速度に応じてサンプリング周波数を変化させて検出信号のサンプリングを行っている。クリアラ15は、走行する糸の太さを検出する第1の糸ムラセンサ43と、CPU47と、を備える。CPU47は、外部の回転センサ42から得られる糸速度信号を受信し、当該糸速度信号に応じたサンプリング周波数で第1の糸ムラセンサ43の信号のサンプリングを行う。
(もっと読む)
粗紡機における異常検出装置
【課題】紡出中の粗糸の張力状態が適正張力からずれている場合に、適正張力に調整して紡出を継続する粗紡機において、本来紡出すべき粗糸重量とは違う品質不良の粗糸巻が後工程に供給されるのを抑制する。
【解決手段】異常検出装置は、フロントローラの回転速度を検出可能なフロントローラ回転速度検出手段と、巻き取り回転速度を検出する巻き取り回転速度検出手段とを備えている。また、フロントローラ回転速度検出手段及び巻き取り回転速度検出手段の検出信号に基づいて各層の巻き取り時における実粗糸巻径を算出可能な実粗糸巻径算出手段と、実粗糸巻径算出手段により算出された実粗糸巻径に基づいて粗糸重量異常を検知する粗糸重量異常検知手段とを備えている。
(もっと読む)
粗紡機におけるボビンレール昇降装置
【課題】紡出時以外のボビンレールの昇降時における衝突等の異常が生じても、昇降機構の損傷を回避することができる粗紡機におけるボビンレール昇降装置の提供にある。
【解決手段】昇降機構を介して昇降するボビンレール22と、該ボビンレール22を昇降させる昇降用モータ36と、昇降用モータ36を駆動制御する制御手段45とを有し、制御手段45は、紡出時における昇降用モータ36の高トルク制限値も低く設定された低トルク制限値を、紡出時以外のボビンレール22の昇降時における昇降用モータ36の出力トルクの制限値として設定する機能を有する。
(もっと読む)
粗紡機における粗糸巻き取り方法
【課題】予定した肩形状の粗糸巻(粗糸パッケージ)を、肩崩れが生じることなく安定して形成することができる粗紡機における粗糸巻き取り方法を提供する。
【解決手段】予め設定された肩形状となるように粗糸を巻き取る際に必要な層チェンジ時の粗糸巻径増加量ΔΦを、粗糸張力検出器の情報から推定し、この推定した粗糸巻径増加量ΔΦを用いてボビンレールの反転位置を決定して粗糸巻を形成する。粗糸巻径増加量ΔΦが粗糸巻径の増加に伴って単調増加すると仮定したΔΦ推定モデルを作成する。そして、粗糸張力検出器から得られる粗糸張力信号に基づいて推定した粗糸巻径増加量ΔΦpと、更新前のモデルで算出した粗糸巻径増加量ΔΦqとの差が小さくなるようにΔΦ推定モデルを更新して、更新後のモデルから粗糸巻径増加量ΔΦを算出する。
(もっと読む)
撚糸機
【課題】トラバースを単錘駆動方式(各撚糸ユニットを独立して駆動する方式)とすることで、トラバースを全錘駆動方式としたのではプレシジョン巻きの巻取パッケージができない虞のある問題を解決し、高密度な合糸の巻取パッケージを作成する。
【解決手段】各撚糸ユニット2毎にクレードルアーム41とドラム42とトラバースモータ32とを備えると共に、ドラム42をラインシャフト9により全錘駆動する撚糸機1に、ドラム回転数センサー49と、各撚糸ユニット2毎に配置されるパッケージ回転数センサー48と、各撚糸ユニット2についてドラム42の直径、ドラム42の回転数、巻取パッケージ6の回転数に基づいて巻取速度およびパッケージ径を算出し、巻取パッケージ6に合糸7がプレシジョン巻きで巻き取られるように、巻取速度およびパッケージ径に基づいてトラバースモータ32の駆動を制御するユニットコントローラ50と、を備える。
(もっと読む)
繊維機械
【課題】各作業ユニットの状態を高精度に把握することが可能な繊維機械を提供すること。
【解決手段】自動ワインダの巻取ユニット2は、給糸ボビン4、巻取管7、糸継装置14、及び、毛羽伏せ装置13にそれぞれ設けられたICタグ40〜43から照合情報を取得し、その照合情報をユニットコントローラ32に送信するアンテナ35を備えている。そして、複数の巻取ユニット2を監視及び制御するホストコントローラ31は、アンテナ35で取得された情報に基づいて、各巻取ユニット2のICタグ40〜43が正規なものか否かを判断して、正規でない場合には、その巻取ユニット2に対して糸巻取処理を禁止する信号を出力する。
(もっと読む)
作業台車の位置決め機構
【課題】主としてインデックスプレートがレールに接触しないようにすることである。
【解決手段】作業台車1の走行を案内するレール2aと、レール2aに配設されたインデックスブロック4と、作業台車1に設けられ、インデックスブロック4に係合して作業台車1を位置決めするインデックスプレート3とを備え、インデックスプレート3は、作業台車1が走行する際には、インデックスブロック4に係合しないようにレール2aから退避し、作業台車1が停止する際には、レール2aから若干離れた位置まで近接して、インデックスブロック4に係合する。
(もっと読む)
毛羽立ち度測定装置
【課題】炭素繊維糸条に種々の加工を加える際に、炭素繊維糸条の表面に発生する毛羽立ちの程度を、実際の加工工程における毛羽立ちの程度に近い実用上有効な精度で測定できる炭素繊維糸条の毛羽立ち度測定装置を提供する。
【解決手段】走行中に擦動を加えられた炭素繊維糸条の毛羽立ち度を測定する装置であって、炭素繊維糸条の繰出しボビン(A)と、走行する炭素繊維糸条の張力測定装置(B)と、炭素繊維糸条がその走行軸を中心として螺旋運動するように、その内側面が炭素繊維糸条に擦動を加えながら該走行軸に垂直な面内を走行軸を中心として円運動する擦動リング(C)と、炭素繊維糸条を所定速度で引取る可変速度ローラー(D)と、炭素繊維糸条の毛羽立ち度を計測する毛羽立ち度計測装置(E)を備えた毛羽立ち度測定装置。
(もっと読む)
ヤーンクリアラの糸情報初期化方法および初期化システム
【課題】クリアラヘッドのクリーニング実施を検出することに基づいた、各錘のヤーンクリアラの糸情報初期化方法、および初期化システムを提供する。
【解決手段】本発明に係るヤーンクリアラは、クリーニング部材を、クリアラヘッドの投光部と受光部の間に繰り返し挿脱して行うクリーニング中に、i)クリーニング部材が挿入されているか否か、ii)挿入時間および/または挿入されていない時間が予め定められた範囲内であるか否か、iii)挿入および/または引き抜きが予め定められた回数以上行われたか否か、の判定結果に基づき、予め定められたクリーニングが行われたかどうか判断し、当該クリアラヘッドの糸径平均値φAVEnの初期化を行う。
(もっと読む)
ヤーンクリアラの検出ヘッドの汚れ検出方法及び検出システム
【課題】素早く正確に光電式ヤーンクリアラのヘッド汚れを検出可能な方法等を提供する。
【解決手段】複数錘からなる機台システムに装備され、各錘における糸品質その他を監視する複数のヤーンクリアラの検出ヘッドの汚れ検出方法であって、特定錘のヤーンクリアラから出力される糸むら信号に基づいて得られる糸太さデータ(φ)、及び/又は糸均斉度データ(CV%)の変化が、監視される糸自身の特性の変化に起因するのか、上記検出ヘッドの汚れに起因するのかを、他の錘のヤーンクリアラから出力される糸むら信号に基づいて得られる糸太さデータ(φ)、及び/又は糸均斉度データ(CV%)との関係から判断するようにした方法とする。
(もっと読む)
繊維機械
【課題】従来の繊維機械は、ストッカーに貯留されている、糸を巻取るための巻取管の数量を検知してはいなかった。そこで、ストッカーに貯留されている巻取管の数量を検知することができ、玉揚作業の効率及び巻取パッケージの生産効率の高い繊維機械を提供すること。
【解決手段】並設された、糸を巻取るための巻取ユニットに設置された、ストッカーに貯留されている巻取管の数量を検知する検知手段を有する繊維機械を提供すること。
(もっと読む)
玉揚げ装置を有する繊維機械
【課題】玉揚げ作業の目標設定において、玉揚げ装置の走行制御機構の負担を軽減しようとすると、巻取りユニットの稼動効率を低下させてしまう。
【解決手段】各巻取りユニット2におけるパッケージ7の巻取り長さの大小を認識する巻取り状態認識手段30bと、巻取り長さが満管にある巻取りユニット7を最優先に、次いで満管に近い巻取りユニット7を優先する順序で、玉揚げ作業の実行目標とする巻取りユニット2を設定する目標設定手段30cと、玉揚げ作業の実行目標とする巻取りユニット2に玉揚げ装置3が到達してから、その巻取りユニット2で形成されているパッケージ7が満管となるまで、玉揚げ装置3に玉揚げ作業の実行を待機させる作業待機手段30dと、を備える。
(もっと読む)
糸の異物検出装置及びこれを備えた繊維機械
【課題】糸のトラッシュと色糸とを判別して、トラッシュは異物として検出しないようにする。
【解決手段】走行する糸Yに光を照射する投光手段72a,72bと、投光手段72a,72bの照射光による糸Yからの反射光を受光する受光手段73a,73bと、受光手段73a,73bの受光量を測定する測定手段78と、測定手段78の測定値に基づいて所定の演算をし、演算値と閾値とを比較して前記糸に混在するトラッシュと色糸とを判別する判別手段74とを備えている。
(もっと読む)
繊維機械
【課題】パッケージ径の検査精度に限界があるだけでなく、パッケージ径の不良な満巻パッケージを生産するユニットを特定しようとしても、どのような大きさのパッケージ径の満巻パッケージが、どの巻取りユニットで形成されたか不明で、追跡調査ができなかった。
【解決手段】紡績機1に、満巻パッケージ45のパッケージ径情報を検出する回転角度検出センサ99と、そのパッケージ径情報が検出された満巻パッケージ45を特定する対応ユニット特定手段(信号発信部41a、信号受信部41b、玉揚台車コントローラ40、信号受信部21a、信号発信部21b、ユニットコントローラ20)と、紡績ユニット2で形成された満巻パッケージ45の径情報を検出する回転角度検出センサ99と、満巻パッケージ45のパッケージ径情報と、その満巻パッケージ45を形成した紡績ユニット2のユニット番号とを、関連付けて記憶するコントロールマスタ50と、を備える。
(もっと読む)
糸継ぎ装置および糸継ぎ方法
【課題】 巻取パッケージ側の糸端と給糸側の糸端とを糸継ぎする際に、巻取パッケージの表面を傷めずに巻取パッケージに巻かれた糸欠点部分を確実に捕捉し全て除去可能とする糸継ぎ装置および糸継ぎ方法を提供することである。
【解決手段】 糸継ぎ部材と、巻取パッケージの表面に接近して糸端を吸引して糸継ぎ部材まで案内する糸端捕捉手段1と、巻取パッケージを糸解舒方向に回転させる逆転手段2とを備えて、前記糸端捕捉手段1を、巻取パッケージの表面に接近して糸端を吸引する捕捉位置1Bと、糸の不良部分を連続吸引する吸引位置1Cと、吸引した糸端を糸継ぎ部材まで案内する待機位置1Aとに移動自在とする糸継ぎ装置Pとし、前記吸引位置1Cを巻取パッケージPW1から離れた位置とする糸継ぎ方法とした。
(もっと読む)
異常錘特定装置および紡績機
【課題】毛羽変動異常の監視において、毛羽変動異常の判定精度を高めようと判定条件を厳しくすれば、糸品質上差し支えのない変動部位まで、切除すべき異常部位として扱うことになってしまう。
【解決手段】異常錘特定装置10に、各錘のHD値(糸太さの分散)を算出する単錘偏差算出手段11と、AHD値(全錘平均のHD値)を算出する全錘偏差算出手段12と、各錘のHD値が、AHD値を基準とする許容範囲を超えたか否かを判断する逸脱有無判断手段13と、同一の錘のHD値が2回連続して、許容範囲を越える場合に、その錘に糸物性異常が発生したと判定する錘間糸物性異常判定手段14と、各錘でHD値の移動平均したHDA値を算出する平均単錘偏差算出手段15と、HDA値が、HDA値の基準値であるHDAS値を基準とした許容範囲を超えたか否かを判断する錘内糸物性異常判定手段16と、を備える。
(もっと読む)
異物検出装置および繊維機械および異物検出方法
【課題】糸条に混入している異物の検出において、残存させたい異物がある場合に、残存させたい異物を検出しないようにすると、除去したい異物の検出精度を落とすことになる。
【解決手段】綿繊維で形成される紡績糸9にLED37a・37bから交互に光(直射光Da・Db)を照射して、その紡績糸9からの反射光Rb・Raの強度を測定し、その強度情報に基づいて、紡績糸9に混入している異物の有無を検出する異物検出装置32であって、LED37a・37bの光源色を、除去せず残存させたい異物である綿繊維の茎葉のトラッシュの色と、色相環において、同一の系統色もしくは類似の系統色である黄色もしくは黄燈色とする。
(もっと読む)
糸条の異常検知装置
【課題】清掃作業の作業性を向上させることができるとともに、色に関係なく糸条の異常状態を検知することができる糸条の異常検知装置を提供すること。
【解決手段】走行する糸条Y異常を光学的に検知する異常検知装置において、この異常検知回路は、糸条Yに光を照射する発光器31と、走行する糸条をY挟んで発光器31に対向する位置に設けられた反射棒33と、反射棒33に隣接するとともに、反射棒33に対向して設けられ、糸条Yおよび反射棒33から反射された光を受光し、この反射光を電気信号に変換する受光器32と、受光器32から出力される電気信号が入力され、この電気信号の変化状態に基づいて糸条Yの有無を検知する増幅回路35、監視タイマー回路36および出力手段37からなる制御手段を有する。
(もっと読む)
繊維機械
【課題】走行する糸の糸欠点を除去する繊維機械において、ドラムの回転速度のように真の糸速とは比例関係にない速度を利用して、糸速を求める構成とすると、実際の糸速とは乖離した値を糸速として扱うことがあり、この糸速情報を前提として糸欠点検出装置に糸の長さを判断させると、糸欠点の判断を誤らせることになる。
【解決手段】走行する糸3の糸速を直接に検出する糸速センサー7と、走行する糸3の糸欠点を検出する糸欠点検出装置8と、糸速センサー7および糸欠点検出装置8を通過した後の糸3を巻き取る綾振りドラム10と、を備えるワインディングユニット1であって、糸欠点検出装置8は、時系列に得られた糸太さの時間変化データDTを、前記糸速の検出値に基づいて、糸太さの長さ変化データDLに変換するデータ変換部82bと、この糸太さの長さ変化データDLに基づいて、糸欠点の有無を判定する糸欠点判定部82dと、を備える。
(もっと読む)
21 - 40 / 49
[ Back to top ]