
Fターム[5B050EA07]の内容
Fターム[5B050EA07]に分類される特許
161 - 180 / 1,874
生体データモデル作成方法及びその装置並びに生体データモデルのデータ構造及び生体データモデルのデータ格納装置並びに三次元データモデルの負荷分散方法及びその装置
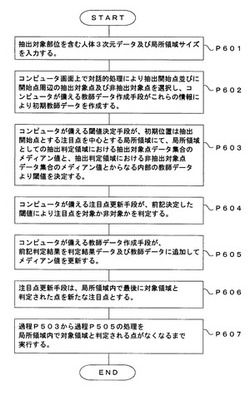
【課題】医用画像データにより三次元データモデルを作成するについて、局所領域の情報を使用して評価基準生成して、対象領域抽出において局所的な閾値を持つことができ、実際の生体の特徴分布に近づけて対象か非対象かを判定する。
【解決手段】第2の過程において、初期位置は抽出開始点とする注目点を中心とする局所領域にて、局所領域としての抽出判定領域における抽出対象点データ集合のメディアン値と、抽出判定領域における非抽出対象点データ集合のメディアン値とからなる内部の教師データより閾値を決定し、第3の過程では、第2の過程において決定した閾値により注目点を対象か非対象かを判定し、第4の過程において、第3の過程による判定結果を判定結果データ及び教師データに追加してメディアン値を更新する。
(もっと読む)
画像処理装置、画像処理プログラムおよび記録媒体

【課題】見易い絵文字画像を容易に作成可能とする。
【解決手段】絵文字画像化したい絵柄が描画された元画像が入力される。入力された元画像は、サイズ正規化部で上下または左右に余白を付加されて正方形の画像とされ、誇張処理部に入力される。誇張処理部は、入力された画像の解像度を正規化した後、当該画像に含まれる絵柄の描画部分の線幅を太くする誇張処理を行う。誇張処理が施された画像は、トリミング処理部でトリミング処理により描画部分が切り出され、さらに上下または左右に余白を追加されて正方形の画像とされる。縮小処理部は、トリミング処理部から出力された画像を、例えば縦20ドット×横20ドットのサイズに縮小して縮小画像を生成する。この縮小画像が絵文字画像として出力される。
(もっと読む)
カード情報管理装置、情報管理方法、情報管理プログラム
【課題】実空間にあるカードの位置やカード上の記載情報を変動に追従して記憶する。
【解決手段】撮影したカードの画像データに基づきカードのボード上における位置を示す位置情報およびカードの記載情報であるカード情報を取得するカード検出モジュール102と、カードそれぞれに対応した固有IDとカード情報を対応付けて記憶するデータ蓄積モジュール105と、ボード上におけるカードの配置状態および記載情報における変動があった場合にカード情報の更新を行う入出力モジュール107を備えた。
(もっと読む)
近隣人物特定装置、近隣人物特定方法、近隣人物特定プログラム及び近隣人物特定システム
【課題】簡易な操作により有用な情報が付加されたコンテンツを作成させる。
【解決手段】本開示の近隣人物特定装置は、使用者によりコンテンツが作成された際における当該使用者の位置情報を取得する使用者位置情報取得部と、他の装置に記憶された、他者が所有する端末により得られた当該他者の位置情報を他の装置から受信する他者位置情報受信部と、使用者の位置情報と他者の位置情報とを基に、コンテンツが作成された際に使用者の近隣に存在した他者を抽出する近隣人物抽出部とを設けるようにした。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、独立して作成された複数の地図の座標系が異なる場合であっても、高精度にこれら複数の地図の座標系を統合することを目的とする。
【解決手段】ロボットの第1のセンサの計測情報に基づき予め生成された第1の地図と、ロボットの各位置での第1のセンサの計測情報とに基づいて第1の地図上の自己位置を推定し、第2のセンサの計測情報に基づき予め生成された第2の地図と、各位置での第2のセンサの計測情報とに基づいて第2の地図上の自己位置を推定し、ロボットの第1の地図上の第1の移動軌跡と第2の地図上の第2の移動軌跡とに基づいて予め算出された、前記第1の移動軌跡の第1の座標系を前記第2の移動軌跡の第2の座標系へ非線形マッピングする座標変換パラメータに基づいて、推定されたロボットの第1の地図上の自己位置を第2の地図上の自己位置に変換するように構成する。
(もっと読む)
デフォルメ地図表示装置
【課題】 ノードの移動が行えるかどうかの判定を行う移動判定処理と描画処理を、グラフィックアクセラレータと呼ばれるハードウェアで処理させることによって、より多数のノードの変形と描画処理をリアルタイム処理できるようにすることを目的とする。
【解決手段】 本発明によれば、算手段100からの移動判定要求に基づいて記憶手段300に記憶されたノードについて、デフォルメ図を描画するため、所定の距離の移動による前記記憶手段300に記憶された他のノードと交差可否について判定する移動判定手段210と、演算手段100からの描画命令に基づいて記憶手段300に記録されているノード座標データ、路線の修飾データから描画設定を行う自動描画手段220と、自動描画手段220からの描画命令に基づいてデフォルメ図を描画する描画手段230を備えた。
(もっと読む)
車載システム
【課題】携帯装置が備える拡張現実アプリケーションの機能を利用できる「車載システム」を提供する。
【解決手段】車載装置1のARクライアントアプリケーション111は、ナビゲーションアプリケーション110から現在位置と現在の前方方向とを取得し、これらを指定情報として、フロントカメラ107撮影領域内の地点に対して登録されたエアタグ情報を、スマートフォン2のARアプリケーション212の機能を利用してARサーバ4から取得する。そして、取得したエアタグ情報を、フロントカメラ107で撮影した自動車前方の画像上の、エアタグ情報が登録されている地点が写り込む位置に表示する(a1)。
(もっと読む)
地盤高データ生成装置、地盤高データ生成方法、及びプログラム
【課題】森林領域の地表面の標高値を取得するためのコストを低く抑え、森林領域の地表面の標高値を正確に取得可能な地盤高データ生成装置を提供する。
【解決手段】ステレオ処理部50はステレオ画像データから処理対象領域の標高値を示す三次元表面モデルデータ(DSM)を取得する。地形分類部60はDSMと近赤外線画像データから処理対象地域を森林領域と地面領域等に分類する。階層分割部70はDSMに基づき処理対象領域を複数の階層に分割する。階層分類部80は標高の高低で全階層を凹階層と凸階層等に分類する。凸階層処理部90は凸階層を高木領域と山頂上領域等に分類する。山単位抽出部100は山領域を示す山領域情報を抽出する。樹高算出部110は地面・森林領域の標高差から各階層の森林領域の平均樹高を得る。地盤高データ出力部120は、階層毎に森林領域の標高値から平均樹高を引き地表面の標高値を求め地盤高データを出力する。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
画像処理システム、装置及び方法
【課題】立体画像とともに表示されるカーソルの位置を観察者に把握させることができる画像処理システム、装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、立体表示装置と、レンダリング処理部と、表示制御部とを備える。立体表示装置は、複数の視差画像を用いて立体視可能な立体画像を表示する。レンダリング処理部は、3次元の医用画像データであるボリュームデータに対して、該ボリュームデータと相対的な位置が異なる複数の視点位置からレンダリング処理を行うことにより複数の視差画像を生成する。表示制御部は、前記レンダリング処理部によって生成された複数の視差画像とともに、前記立体表示装置にて立体画像が表示される3次元の立体画像空間において所定の入力部によって操作可能なカーソルの奥行き方向の位置を表す所定の図形の画像である図形画像を前記立体表示装置に表示させる。
(もっと読む)
情報処理装置、情報処理方法及びコンピュータプログラム
【課題】保存されている画像データを顔認識させて、当該顔認識の結果を用いて、簡便な画像選択をユーザに提供することが可能な情報処理装置を提供する。
【解決手段】所定位置に画像を表示する画像表示部と、人物の顔を撮像する撮像部と、前記撮像部が撮像した顔の状態に基づいて、該状態に関する顔パラメータを有する画像を選択する画像選択部と、を備え、前記画像表示部は、前記画像選択部が選択した画像の顔部分が直前まで表示していた画像の顔部分と一致するように前記画像選択部が選択した画像を表示する、情報処理装置が提供される。
(もっと読む)
画像の表示制御装置、画像表示システム、画像表示方法並びにプログラム
【課題】 ネットワークを介してサーバー上に蓄積された画像を効率よく、ユーザーの興味を引くように表示させる画像の表示制御装置、画像表示システム、画像表示方法並びにプログラムを提供する。
【解決手段】 投稿された画像の縮小画像A〜Pが画面上に配列表示されている。これらの画像は矢印Y方向へ流れるように移動表示される。Aの列、Eの列、Iの列、Mの列でそれぞれ画像の移動速度が異なる。投稿画像にはアクセス数やポイント数などの価値情報が付されており、Aの列とMの列には価値が相対的に低い画像が配列され、Eの列とIの列には価値が相対的に高い画像が配列されて、Aの列とMの列は画像が相対的に早く流れ表示されて新しい画像に変わっていき、Eの列とIの列は画像が相対的に遅く流れ表示されて長時間視聴者の目に留まるようになっている。
(もっと読む)
衝突検出システム、ロボットシステム、衝突検出方法及びプログラム
【課題】衝突検出対象オブジェクトの正確な衝突判定を実現できる衝突検出システム、ロボットシステム、衝突検出方法及びプログラム等の提供。
【解決手段】衝突検出システムは処理部と描画部を含む。描画部は、衝突検出対象オブジェクトの所定の視点から見たときの前面を描画する第1の描画処理を行って前面深度値を生成し、衝突検出対象オブジェクトの所定の視点から見たときの背面を描画する第2の描画処理を行って背面深度値を生成する。また衝突検出対象オブジェクト以外の他のオブジェクトを描画する第3の描画処理を行う。処理部は、前面深度値と背面深度値とに基づいて、所定の視点から見たときの衝突検出対象オブジェクトの前面と背面の間に、第3の描画処理により描画された他のオブジェクトが存在すると判定した場合に、衝突検出対象オブジェクトが他のオブジェクトに衝突したと判定する。
(もっと読む)
ズーミング可能な立体写真ビューア
【課題】立体写真を閲覧する際に、ズームインで融像が2重像に乖離せず、自然な融像を閲覧できるズーミング可能な立体写真ビューアを実現する。
【解決手段】閲覧者に、左目用画像と右目用画像とを提示する立体表示装置と、画像を供給する表示制御装置と、を備え、左目用と右目用画像とを閲覧者に提示する。立体表示装置に表示された左と右画像の間隔Dは、ズームイン(ズームアウト)の倍率mに従って変化させることで、融像位置が、動かないか手前に(奥に)移動するようにする。特に、αおよびβを定数、0≦p≦1として、D=α×(1/m−β)pとする。また、ズーミングは、倍率mの関数として、左右の立体写真の端点間の距離tを変化させることで行う。また、1≦n≦2として、a、b、kを定数として、距離tは、a×(1/m−k)n+bとなる倍率mの関数とし、ズームイン、ズームアウトの限界点で定数a、b、kを決める。
(もっと読む)
画像生成装置及びその制御方法、プログラム、及び記録媒体
【課題】地図の縮尺の変更に対応して、画像を地図上の適切な位置に配置する方法を提供する。
【解決手段】地図上に配置する画像について、配置位置を、第1の縮尺では予め定められた第1の配置位置に決定する。また、第1の縮尺よりも大きい第2の縮尺では、当該第2の縮尺の地図において第1の配置位置に対応する位置よりも、画像の撮影場所に近い第2の配置位置に配置位置を決定する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】ユーザの直感的な動作に応じて、複数の画風から任意の画風を選択して、原画像を当該画風に変換した絵画風画像を生成することにより、ユーザの画像変換に対する興味を高めることができる画像処理装置、画像処理方法および該画像処理装置を機能させるための画像処理プログラムを提供する。
【解決手段】画像表示装置10は、画像処理部26において、CPU21からの命令に基づいて、内部メモリ24に一時保存された原画像を、タッチパネル等の入力部33を介して入力されるユーザの直感的又は感覚的な動作(接触移動速度)に応じて、複数の画風から選択された特定の画風からなる絵画風画像に変換する画像変換処理を実行する。
(もっと読む)
入力装置
【課題】操作者とノイズとなる背景とを正確に識別して、カメラの撮影範囲内に操作者以外の人が居て手を動かした場合でも誤動作しない入力装置を提供する。
【解決手段】右眼用撮像装置Aと右眼用撮像装置Bと並べて配置し、距離測定手段Cにて両眼視差法によりそれぞれの撮像装置A、Bが撮像した被写体までの距離を測定する。そして、被写体判別手段Dは、測定した距離を両方の撮像装置A、B間の間隔に基づいて両眼視差法により割り出して予め設定してある奥行き距離と比較し、被写体までの距離と奥行き距離とが所定の許容範囲内で一致していると、操作指示生成手段Eはこの被写体の動きを検出し、この検出結果に応じた操作指示を生成する。
(もっと読む)
情報処理装置、その処理方法及びプログラム
【課題】
現実画像と仮想画像(CG)とを正確且つ高速に合成できるようにした技術を提供する。
【解決手段】
情報処理装置は、現実空間を撮影した現実画像に対して仮想画像を合成する。ここで、情報処理装置は、現実空間における各部の奥行き情報を取得する取得手段と、仮想画像における各部の奥行き情報を算出する奥行き情報算出手段と、取得した奥行き情報と算出した奥行き情報とをそれぞれ対応する位置毎に比較し、それぞれの差が所定の閾値を越える領域を抽出領域として抽出する領域抽出手段と、現実画像における色情報を用いて抽出領域を補正する補正手段と、補正した抽出領域を、仮想画像の描画を禁止する描画禁止領域として規定する規定手段と、描画禁止領域に基づいて仮想画像を描画する描画手段と、現実画像と描画した仮想画像とを合成する合成手段とを具備する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよびバーチャル顕微鏡システム
【課題】対象標本の現象に即して、対象標本画像を高精度で解析できる画像処理装置を提供する。
【解決手段】ヘマトキシリン染色を含む染色標本画像を処理する画像処理装置であって、染色に使用される色素のスペクトルを記憶する色素のスペクトル記憶部233と、色素のスペクトルに基づいて、当該色素のスペクトルの波長方向の変化特性を算出する変化特性算出部2501と、色素のスペクトルと変化特性とに基づいて、染色標本画像の各画素における少なくともヘマトキシリン染色の色素量および波長方向のシフト量を推定する色素量・波長シフト量推定部2505と、推定された波長方向のシフト量に基づいて染色標本画像の細胞核領域を抽出する細胞核抽出部2507と、を有する。
(もっと読む)
画像検索装置および画像検索方法
【課題】 分類された画像を表示手段上で少ない操作で容易に検索することのできる画像検索装置および画像検索方法を提供する。
【解決手段】 インデックス顔画像83と類似する顔で、かつ同じ方向を向いている顔が写っている撮影画像82が有るか否かを検索し判定する(S34)。判定の結果、撮影画像82が検索された場合には、その撮影画像82を表示する(S35)。
(もっと読む)
161 - 180 / 1,874
[ Back to top ]