
Fターム[5B057AA04]の内容
Fターム[5B057AA04]の下位に属するFターム
Fターム[5B057AA04]に分類される特許
1 - 20 / 58
マシンビジョン検査システムおよびその位置測定結果の決定方法
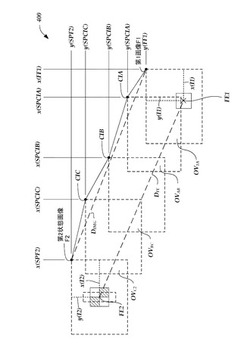
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
画像判別装置、画像特定装置、この画像特定装置を備えた作業工程管理システム、および、プログラム

【課題】画像の照合にかかる時間を可及的に短くし、かつ、適切に画像の照合をすることができる画像判別装置を提供する。
【解決手段】基準マスタ画像における特徴部位を指定する特徴指定部441と、マスタ画像において特徴部位を検出する特徴検出部442と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、マスタ画像を変換する画像変換手段443と、撮像画像において特徴部位を検出する特徴検出部446と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、撮像画像を変換する画像変換手段447と、変換後マスタ画像の指定色部分と変換後撮像画像の指定色部分とが一致するか否かを判別する判別部449とを備え、判別部449によって一致すると判別された場合に、撮像画像の被写体がマスタ画像の被写体と一致すると判別するようにした。
(もっと読む)
基準マークモデルテンプレート作成方法
【課題】回路基材の基準マークのモデルテンプレートを誤りなく作成し得る方法を得る。
【解決手段】回路基材の基準マーク形成予定位置周辺を撮像装置により撮像し、それにより得られた画像の中から基準マークの像である可能性の高い像である基準マーク候補を抽出する基準マーク候補抽出工程(S2,S8〜S11)と、抽出された基準マーク候補が複数種類予定されている基準マークのいずれであるかを判別するマーク種判別工程(S3)と、そのマーク種判別工程の実施により種類が判明した基準マークのモデルテンプレートを作成するテンプレート作成工程(S5,S7)との実行により、モデルテンプレートの作成を行う。基準マーク候補抽出工程を、ハールライク特徴を用いた階層型アダブースト検出器を利用して基準マーク候補を抽出する工程とし、マーク種判別工程をニューラルネットワークを利用してマーク種を判別する工程とする。
(もっと読む)
低密度の反射対応から鏡面物体の表面を再構築するための方法
【課題】低密度の反射対応から鏡面を再構築する。
【解決手段】点対応手順が鏡面物体203の画像のセットに適用され、低密度の反射対応が生成される(210)。画像のセットは、カメラ202によって取得される間、回転を受ける。すなわち、カメラ202、環境、又は物体203のいずれかが回転する。線形系AΘ=0が解かれる(220)か、又は関連する二次錐計画(SOCP)が解かれる。ここで、Θは局所表面パラメーターのベクトルである。表面の勾配は局所二次曲面パラメーターから得られ(230)、勾配は法線を得るために統合される(240)。ここで法線は表面の形状を定義する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】距離画像から対象物体の位置姿勢を算出する位置姿勢算出の精度低下を防ぎながら処理速度を維持向上させる。
【解決手段】対象物体までの距離画像を取得する取得部と、距離画像から対象物体の概略位置姿勢を決定する概略位置姿勢決定部と、形状モデル上の所定領域に対応する、距離画像における領域の距離情報のばらつきの程度を示すばらつき値を算出する算出部と、ばらつき値が小さい程、サンプル点の数が少なくなるように、形状モデル上の所定領域ごとに当該所定領域からサンプル点をサンプリングするサンプリング部と、概略位置姿勢からサンプル点と距離画像上の2次元計測点を3次元座標に変換した3次元計測点とを対応付ける対応付け部と、各サンプル点と各3次元計測点との間の距離の総和が最小になるように対象物体の位置姿勢を決定する位置姿勢決定部と、を備える。
(もっと読む)
部品検査装置及びプログラム
【課題】複数の部品が任意に配置されている場合であっても、部品の配置による見え方の相違を吸収して大きさや形状等の外観を検査する。
【解決手段】複数の部品を撮影した画像をブロブ処理し、抽出されたエッジから求まるエッジ接線ベクトルを用いてエッジ接線画像に変換し、サンプルエッジ接線画像に対するマスターエッジ接線画像の畳み込み処理により抽出された個々のブロブに基づいて、マスター部品の所定部位のサイズ、位置xm、及び角度θmを定めたテーブルを用いて、検出されたサンプル部品の位置xs及び角度θsに対応するサイズを補完計算して、検出されたサンプル部品の所定部位のサイズと比較して、サンプル部品を検査する。
(もっと読む)
鋼板の突き合わせ開先位置の検出方法および装置
【課題】端部に「ダレ」を有している鋼板においても、正確にかつ安定して突き合わせ開先位置を検出する。
【解決手段】2枚の鋼板の突き合わせ部を、突き合わせ線が前記撮像装置の撮像面の水平軸方向となるようにして撮像する撮像工程と、撮像工程で取得された撮像画像から得た部分画像を、予め設定した閾値Tを用いて2値化画像を出力する2値化工程と、2値化画像において水平軸方向をx軸方向、垂直軸方向をy軸方向として、各画素座標(i、j)の2値化輝度値U´について、y軸方向の輝度差分値Vを、各iについて演算する工程イと、工程イで演算した輝度差分値Vをiについて積算して輝度差分射影値Wを演算する工程ロと、工程ロで演算した輝度差分射影値Wにおいてピークの画素位置を求めて、前記2枚の鋼板それぞれの突き合わせ開先位置として検出するピーク位置検出工程とを有する検出方法。
(もっと読む)
外観検査装置
【課題】画像ファイルのファイル名から良否の判定結果を知ることを可能にし、さらに良否の判定結果を越える内容もファイル名から知ることを可能にする。
【解決手段】撮像装置1で撮像した検査対象物の画像から抽出した文字について、文字領域抽出部2,特徴量記憶部3、特徴量抽出部4、特徴量照合部5により文字認識を行う。判断部6は、検査対象物を撮像した画像に含まれる文字に対する文字認識の結果について所望の文字と一致するか否かの良否判定を行う。ファイル名生成部7は、判断部6において不一致と判定されたときに少なくとも一致しなかった文字と判定結果とを含むファイル名を生成する。ファイル名生成部7で生成されたファイル名は、当該画像の画像ファイルとともに画像記憶部10に保存される。
(もっと読む)
視覚認識処理用のモデルデータの登録方法および視覚センサ
【課題】個々の視覚センサの設置環境や計測条件に適合し、認識精度が確保されたモデルデータを容易に作成できるようにする。
【解決手段】ワークの視覚認識が可能な範囲を表す基本モデルを入力する一方で、実際の計測と同様の条件でワークを撮像して計測し、この計測により取得したワークの特徴データを基本モデルと照合する処理を、複数サイクル実行する。そして、基本モデルのうち、毎時の照合処理のいずれにおいてもワークの特徴データに対応づけられなかった情報、または対応づけられなかった回数または割合が所定の基準値を上回る情報、もしくは実行されたいずれかの照合処理で特徴データに対応づけることができなかった情報を、不要情報に設定する。そして、基本モデルから不要情報を削除し、削除毎の情報を登録対象のモデルデータとして特定し、メモリに登録する。
(もっと読む)
テンプレートマッチングシステムおよびテンプレートマッチング方法
【課題】テンプレートマッチングにより取得したテンプレートに基づいて、部品が載置されている姿勢が安定的か、否かを判定し、不安定な場合は警告を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
(もっと読む)
軸物工具表面の欠陥検査方法および装置
【課題】複雑な構造を有する軸物工具の表面における欠陥を検査することができる軸物工具表面の欠陥検査方法および装置を提供する。
【解決手段】欠陥検査装置が、軸物工具の表面を撮影した画像が入力され、該入力された画像を予め定められている画像サイズに分割する画像分割部と、画像分割部の分割した画像を入力データとして、予め学習されている第1のニューラルネットワークにより出力値を算出する第1のニューラルネットワーク処理部と、第1のニューラルネットワーク処理部の算出した出力値に基いて、軸物工具の表面に欠陥があるか否かを判定する欠陥有無判定部と、を有する。
(もっと読む)
移動体位置検出システム
【課題】平面上に描いたパターンを利用して移動体の位置の検出を行う。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】画像の階調を向上させる。
【解決手段】ΔΣ変調部31は、そこに供給される画像に、ΔΣ変調を施し、その結果られる変調画像は、記憶部21に記憶される。信号処理部22は、記憶部21に記憶された変調画像に、所定の信号処理を施す。ΔΣ変調部31のΔΣ変調によるノイズシェーピングの周波数特性は、信号処理部22の所定の信号処理の周波数特性の逆の特性になっている。本発明は、画像に、拡大処理等の所定の信号処理が施される場合に、その所定の信号処理の対象となる画像を生成する場合に適用できる。
(もっと読む)
画像合成方法および画像処理システム
【課題】FA分野などにおいて用いられる視覚センサに適した、複数の撮像装置で被測定物をそれぞれ撮像して得られる複数の画像から合成画像を得るための画像合成方法およびそれに向けられた画像処理システムを提供する。
【解決手段】基準プレートを載置した(ステップS100)後、ユーザは、各撮像装置の撮像すべき領域が各自の撮像視野内に入るように、取付け位置などを調整する。さらに、ユーザは、モニタに表示される複数の入力画像に対して、その中に現われるガイドパターンを参照して、隣接する入力画像の相対位置を粗調整する。その後、CPUは、隣接する2つの入力画像について、所定の探索範囲内に存在する特徴点を探索し(ステップS116)、探索された特徴点同士を対応付け(ステップS118)、2つの入力画像の間についての相対位置を決定する(ステップS120)。
(もっと読む)
画像処理装置
【課題】画像処理ユニットから送られてくるデータ等の情報の取りこぼしを防止することができる画像処理装置を提供すること。
【解決手段】本発明の画像処理装置は、所定の画像データの処理を行うための少なくとも1つの画像処理ユニット1と、画像処理ユニット1から出力されるデータを一時的に記憶するデータ一時記憶装置2と、画像処理ユニット1から出力されるデータをデータ一時記憶装置2を介して受けるホスト処理装置3と、を具備する。画像処理ユニット1は、配線基板の上にマイクロプロセッサ、ロジックアレイ、メモリ装置及びこれらを接続する接続手段と外部信号入出力のための少なくとも1つの外部接続端子とを有し、前記マイクロプロセッサ及び前記ロジックアレイに組み込まれるソフトウェアによりデータの処理内容が決定される少なくとも1つのセル基板11を具備する。
(もっと読む)
画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】最小二乗法を用いた精密位置決めの精度、特に回転角度の精度を向上させる。
【解決手段】登録画像から輪郭を抽出し、登録画像のパターンモデルを構築する工程と、サーチ対象画像を取得すると共に、該サーチ対象画像中に含まれる登録画像に対応する初期位置を取得し、該初期位置に従って、前記パターンモデルをサーチ対象画像上に重ねるように配置する工程と、前記パターンモデルを構成する各円弧セグメントに対応するサーチ対象画像上の個々の対応エッジ点を求める工程と、各円弧セグメントとその対応エッジ点との関係を評価値とし、該評価値の累積値が最小又は最大となるように、前記与えられた初期位置の精度よりも高い精度で精密位置決めを行う工程とを含む。
(もっと読む)
NC工作機械のモニタ画面表示装置
【課題】工作機械のカラーモニタに表示される情報の配色を切替可能にした工作機械に関し、種々の色の見え方をする人に、より見やすい画面を表示することで、総てのオペレータに使いやすい工作機械を提供する。
【解決手段】工作機械のNC装置の補助記憶装置5に色弱者用に複数のカラーパターン(色の組合わせ)を持つカラーテーブル13を登録し、個々のオペレータがカラーテーブル変更画面に表示される複数のカラーパターンの中から一つを任意に選択できるようにし、一般色覚者および色弱者にモニタの表示情報が正確に伝わるようにする。カラーパターン選択画面には、配色例を表示し、また、現在選択されているカラーパターンで使用している色を表示する。
(もっと読む)
工作機械用の、コントラストの移行を識別する画像処理装置および当該画像処理装置を作動させる方法
コントラストの移行を識別する画像処理装置は、デジタル画像検出ユニットを光学的なセンサユニットとして有しており、光学的なセンサユニットのデジタルセンサ信号が評価ユニット内で処理される。  (もっと読む)
(もっと読む)
技術管理装置及び技術管理方法
【課題】シミュレーションデータを準備することなく作業者の視点を追尾することで技術管理を行う。
【解決手段】視点追尾装置10及び運転情報管理装置20を用いて、視点追尾装置を装着した作業者の視野と注視点とを管理することで技術管理を行うための技術管理方法であって、作業者の視野画像を取得するステップと、作業者の注視点を追尾して視野画像の上の作業者の注視点を取得するステップと、注視点の位置を判断するステップと、注視点の位置に関連する運転情報を取得するステップと、運転情報を音声出力部17に出力するステップと、を有することを特徴とする技術管理方法。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】非検出対象のノイズを確実に除去し、検出対象の欠陥を安定に検出できる画像検査装置を提供する。
【解決手段】第1閾値設定手段31が、検出対象画像中の検出すべき最低輝度値を第1閾値として設定し、ラベリング処理手段32が、撮像手段2が取得した多値画像から、第1閾値より大きい輝度値を有する画素の集合体(ブロブ)を特定する。第2閾値設定手段33が、第1閾値よりも大きい第2閾値を設定し、削除手段34が、ラベリング処理手段32により特定されたすべてのブロブから、第2閾値より小さい輝度値のみからなるブロブを削除し、ノイズ処理画像を出力する。
(もっと読む)
1 - 20 / 58
[ Back to top ]