
Fターム[5B057CD03]の内容
画像処理 (340,757) | 処理部 座標変換 (9,303) | 線型変換(アダマール変換) (6,458) | 回転 (1,074)
Fターム[5B057CD03]の下位に属するFターム
n∠Rの回転 (161)
Fターム[5B057CD03]に分類される特許
21 - 40 / 913
画像処理装置、および画像処理プログラム
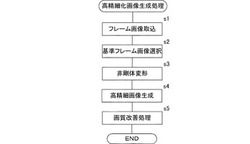
【課題】複数枚の撮像フレーム間における、撮像されている人物の顔等の対象オブジェクトの向きの違いを考慮し、この対象オブジェクトについて高精細な画像を生成することができる画像処理装置提供する。
【解決手段】画像処理部4は、画像入力部3に入力されたフレーム画像の中から、対象オブジェクトが撮像されているフレーム画像を、予め定めたフレーム数取り込み(s1)、基準とする基準フレーム画像を選択する(s2)。画像処理部4は、基準フレーム画像として選択しなかった非基準フレーム画像毎に、対象オブジェクトの向きを、基準画像における対象オブジェクトの向きに合わせる非剛体変形を行う(s3)。画像処理部4は、非剛体変形を行った非基準フレーム画像を用いて、対象オブジェクトについて高精細画像を生成する(s4)。
(もっと読む)
動画提示装置

【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
3次元計測装置と3次元計測方法
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
画像処理装置、画像処理システム
【課題】カラーチャートを用いずに2つの印刷物の色調ズレを、校正することができる画像処理装置を提供すること。
【解決手段】第一の出力画像データと、第二の出力画像データの位置合わせを行うための幾何学変換パラメータを求める幾何学変換パラメータ推定手段42と、幾何学変換パラメータにより対応づけられる、第一の出力画像データと前記第二の出力画像データの画素又は画素群の画素値の差分を求めて差分画像データを生成する差分検出手段61と、前記差分画像データの画素値と変換後の画素値を対応づけた変換テーブルを参照し、前記差分画像データの画素値が変換された補正画像データを作成する補正処理手段62と、原稿画像データと前記補正画像データの対応する画素の画素値を算術処理することで前記原稿画像データと前記補正画像データを合成する画像合成手段63と、を有することを特徴とする。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
撮像システムおよびその制御方法
【課題】別々に撮像された複数の部分画像を合成することにより広画角な全体画像を取得する撮像システムにおいて、つなぎ目部分が不自然でない高品質な全体画像を簡易な処理で生成可能とする。
【解決手段】撮像システムが、被写体の撮像範囲を複数の小区画に分割して撮像する撮像手段と、前記撮像手段で撮像された各小区画の部分画像を合成して全体画像を生成する画像処理手段と、前記撮像手段で被写体を撮像する前に、その被写体上の複数の点を計測し計測データを取得する計測手段と、前記計測手段で取得された各計測点の計測データに基づいて、計測データの値の空間的な変化がより小さい位置に小区画の境界が配置されるように、当該被写体の分割位置を調整する分割位置調整手段と、を備える。前記撮像手段は、前記分割位置調整手段により調整された分割位置に従って各小区画の撮像を行う。
(もっと読む)
駐車支援装置
【課題】自車両が移動しても駐車スペースが表示画面に表示される俯瞰映像をリアルタイムにユーザに提供すること。
【解決手段】駐車支援装置1は、車両を駐車させるための駐車目標位置を第1俯瞰映像より検出する駐車目標位置検出手段34と、視点位置を決定する視点位置決定手段34と、回転量を決定する回転量決定手段34と、視点位置と回転量とに基づいて第1俯瞰映像を回転させる視点変換テーブルを作成する視点変換テーブル作成手段35と、視点変換テーブルに基づいて第1俯瞰映像より第2俯瞰映像を生成する第2俯瞰映像生成手段36とを有する。
(もっと読む)
画像処理システム、端末装置及び方法
【課題】利用者が所望する立体画像を表示することができる画像処理システム、端末装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、医用画像を表示する端末装置を有する画像処理システムであって、表示部と、取得部と、表示制御部とを有する。表示部は、医用画像を表示する。取得部は、所定の対象物に対する端末装置の位置を取得する。表示制御部は、取得部によって取得された対象物に対する端末装置の相対的な位置に応じた医用画像を表示部に表示させる。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
ブレ補正装置、ブレ補正方法及び帳票
【課題】PSFを用いて画像のブレを補正する場合に、比較的少ない演算量で、かつ、簡易な構成で、かつ、容易な操作で、高精度のブレ補正を行うことができるブレ補正装置を提供すること。
【解決手段】ブレ補正装置100は、撮影画像からレイアウトマーカを検出するレイアウトマーカ検出部102と、PSF推定用マーカの位置を求める推定用マーカ位置算出部104と、PSF推定用マーカの大きさを求める推定用マーカサイズ算出部105と、基準となるPSF推定用マーカ画像を生成する推定用マーカ基準画像生成部106と、基準となる推定用マーカ画像とそれに対応する撮影画像中の推定用マーカ画像とを用いてPSFを推定するPSF算出部108と、推定されたPSFを用いて撮影画像のブレを補正するブレ補正部109と、を有する。
(もっと読む)
画像照合装置、患者位置決め装置及び画像照合方法
【課題】放射線治療の患者位置決めの際に、3次元現在画像の断層画像数が3次元基準画像よりも少ない場合であっても、精度の高い2段階パターンマッチング(2段階照合)を実現することを目的にする。
【解決手段】3次元基準画像と3次元現在画像とを照合し、現在画像における患部の位置姿勢を基準画像における患部の位置姿勢に合うように体位補正量を計算する照合処理部22と、を備える。照合処理部22は、基準画像から現在画像に対して1次照合を行う1次照合部16と、基準画像又は現在画像の一方から1次照合の結果に基づいて生成された所定のテンプレート領域から、所定のテンプレート領域の生成元とは異なる基準画像又は現在画像の他方から1次照合の結果に基づいて生成された所定の検索対象領域に対して、2次照合を行う2次照合部17と、を有する。
(もっと読む)
表示制御装置および方法、プログラム、並びに記録媒体
【課題】画面に複数の視点を切り替えて表示させる場合に、できるだけ早く表示遷移を完了させるとともにユーザの操作性を向上させることができるようにする。
【解決手段】複数のカメラにより撮影された画像をそれぞれ取得し、前記取得した画像のうちの所定の画像に表示されている特定のオブジェクトを検知し、前記取得した複数の画像において、前記特定のオブジェクトが検知された前記所定の画像とは異なる別の画像で同一のオブジェクトが検知された場合、前記別の画像のオブジェクトの表示の形態を前記所定の画像のオブジェクトを基準として設定し、同一の画面に表示するように制御する。
(もっと読む)
画像形成装置及び画像処理プログラム
【課題】複雑な演算を必要とせずに、スキュー検知及びスキュー補正を行うことができる画像形成装置を提供する。
【解決手段】実施形態に係る画像形成装置は、画像読取部で読み取った画像データを一時的に記憶するページメモリと、画像データを2値化する2値化回路と、2値化した画像データから文字列の存在範囲にある文字画素をカウントして累積値を副走査方向のライン毎に算出し、文字列の存在範囲内で最初のラインと最初のラインの累積値とを表す第1の座標と、文字列の存在範囲内で最大の累積値と最大の累積値を有するラインとを表す第2の座標の位置をもとに画像データのスキュー量を算出するスキュー検出部と、ページメモリに記憶した画像データをスキュー量に応じて回転処理して出力するスキュー補正部と、を具備する。
(もっと読む)
画像補正方法、および立体画像撮影装置
【課題】被写体距離に応じて、取得した左右2枚の画像間での上下ズレを低減することを可能とする画像補正方法、および立体画像撮影装置を提供する。
【解決手段】Δθによる補正が行われた左目用画像aおよび右目用画像aの両方を、任意の角度Δφ回転させ、被写体aの2個の特徴点の、左目用画像aと右目用画像aとの間での上下方向における差分ΔYを算出する。左目用画像bおよび右目用画像bの両方を、ΔθおよびΔYを相殺するように、かつΔφ回転させて補正し、被写体bの特徴点の、左目用画像bと右目用画像bとの間での上下方向におけるズレΔY´を算出する。以上の操作を、複数のΔφについて行い、ΔY´が最小となるΔφおよびΔYを求める。
(もっと読む)
画像処理装置及び方法
【課題】 任意の角度から見た自身の姿を確認することができるようにする。
【解決手段】 表示画像生成部は、被写体の注目部分の変化量に連動させて、異なる視点で被写体が撮影された画像又はそれと等価な画像を、被写体画像として生成する。画像表示制御部は、表示画像生成部により生成された被写体画像を表示画面に表示させる。本技術は、被写体の画像を表示する画像処理装置に適用することができる。
(もっと読む)
画像処理システム、装置及び方法
【課題】観察者によって観察された画像を容易に出力することができる画像処理システム、装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理装置においては、表示部は、視差画像群を表示することで立体視可能に表示対象物の画像を表示するものであり、かつ、観察方向によって異なる視差画像が見えるように表示する。視点情報検出部は、観察者による表示部の観察方向を検出する。画像出力部は、観察方向に基づいて、視差画像群の中から画像を選択して出力する。
(もっと読む)
検査装置、情報処理方法及びプログラム
【課題】同じ部位の画像は全て同じ向きに統一することを目的とする。
【解決手段】医療用の検査装置であって、患者の撮影画像と、撮影画像と関連付けられている予め設定された患者の方向を示す患者方向情報と、を表示装置に表示する表示手段と、患者方向情報が示す方向の変更を指示された場合、表示装置に表示されている患者方向情報が示す方向を指示された方向に変更する患者方向変更手段と、患者方向情報が示す方向が変更された場合、患者方向情報と関連付けられている撮影画像の向きを変更される前の患者方向情報が示す方向に変更する変更手段と、変更手段で向きを変更された撮影画像を出力する出力手段と、を有することによって課題を解決する。
(もっと読む)
画像処理装置、画像処理装置の画像処理方法及びプログラム
【課題】 PDLデータから中間データを生成する際のサイズ増加を抑え、ラスタ画像データ生成時の画質劣化を低減する。
【解決手段】 画像処理装置の画像処理方法であって、入力されるPDLデータ内のイメージデータをタイル単位に分割する(S802)。そして、可逆圧縮すべきタイル属性か、または非可逆圧縮すべきタイル属性かを、分割されたタイル毎に判定する(S804)。その際ビットマップ部に対応する画像データを回転し拡大処理を行う。そして、タイル毎のイメージデータを、判定されたタイル属性に応じて、フラットフィル部は可逆圧縮方式、ビットマップ部は非可逆圧縮方式で圧縮し、属性の異なる中間データを生成する(S805,S806)。そして、生成された中間データを伸長しラスタ画像データを生成する際に、判定されたタイル属性に応じて、フラットフィル部に対応する色データに対して、拡大処理を行うことを特徴とする。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】シングルポートのSRAMを用いて画像処理装置の処理効率を改善する。
【解決手段】画像処理装置10は、複数の変換前画素値を記憶するメインメモリ30と、複数のキャッシュブロックを有するキャッシュメモリ20とに接続される。カウンタと、座標決定部と、メモリコントローラと、キャッシュアクセス部と、画素値計算部と、出力部とを備える。メモリコントローラは、メインメモリ30に記憶された複数の変換前画素値をそれぞれ、変換前座標に応じたキャッシュブロックへ転送する。キャッシュアクセス部は、複数のキャッシュブロックから、変換後画素値の計算に必要な全ての変換前画素値を1回のキャッシュアクセスで読み出す。画素値計算部は、キャッシュアクセス部が読み出した変換前画素値を参照して、変換後画素値を計算する。出力部は、変換後画素値を出力する。
(もっと読む)
部品回転角度検出装置及び画像処理用部品データ作成装置並びに部品回転角度検出方法及び画像処理用部品データ作成方法
【課題】リード以外のコイル等の金属部分が露出する部品でも、リードのみを画像認識して部品の回転角度を精度良く検出できるようにする。
【解決手段】カメラで撮像したリード付き部品の画像の中からリード識別データとの類似度が所定値以上の部分をリードとして識別し、識別したリードの位置に基づいて当該部品の回転角度を算出する。ここで、リード識別データは、予めリードの先端画像をリードの方向(0°、90°、180°、270°)毎に学習して作成され、記憶装置に記憶されている。リード識別データとして、Haar−like特徴量、HOG特徴量、SIFT特徴量のいずれかが用いられる。検出した回転角度に応じて画像内における部品の回転角度を補正し、当該部品の特徴を抽出して画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を作成する。
(もっと読む)
21 - 40 / 913
[ Back to top ]