
Fターム[5B057DB05]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 白黒 (782)
Fターム[5B057DB05]に分類される特許
281 - 300 / 782
パターン測定方法、パターン測定装置およびプログラム
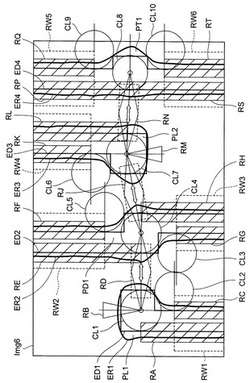
【課題】パターンの寸法測定に際して寸法測定範囲(ROI)を自動的に設定する。
【解決手段】実パターンの輪郭ER1〜EDRの像と、実パターンの設計図形とのマッチングを実パターンの画像上で行い、設計図形の輪郭線ED1〜ED4に内接または外接する円CL1〜CL10を設計図形に当てはめ、円CL1〜CL10と輪郭線ED1〜ED4との接点を基準に寸法測定範囲(ROI)RA〜RH,RJ〜RQ,RS,RTを決定する。
(もっと読む)
収差挿入部材により波収束を最適化する方法
本発明は、媒体(4)の関心領域(6)における波収束を最適化する方法に関し、前記波は、初期には未決定である位相偏差を挿入する収差挿入部材(5)を介して媒体(4)にソース・ネットワーク(3)によって放射される。本発明の方法は、放射波のM−1回の連続修正を使用することを含み、各々は、阻害をもたらす。本発明によれば、M回の阻害は、位相および/または振幅分布の各修正で、関心領域(6)において測定され、これらの測定値は、関心領域(6)において生成された阻害を最大化する最適収束特性を引き出すために使用される。  (もっと読む)
(もっと読む)
画像処理装置及び画像処理プログラム

【課題】所望の対象組織を評価するための三次元の関心領域を再現性高く設定することができる。
【解決手段】医用画像撮影装置で撮影された画像データを基に再構成された三次元画像を取得し、取得した三次元画像から特定の組織を3次元の参照領域として抽出する。抽出された参照領域の形状又は濃度に関する特徴である特徴量を算出し、その特徴量と方向及び距離に関する情報である境界条件とに基づいて、3次元の関心領域を設定する。これにより、三次元の関心領域を再現性高く設定することができる。なお、3次元の関心領域から画像診断の対象となる解析領域を抽出することもできる。
(もっと読む)
指紋画像の回転角度算出装置、指紋画像回転装置、指紋照合装置、指紋画像の回転角度算出プログラム、指紋画像回転プログラム及び指紋照合プログラム
【課題】指紋センサのばらつきや指紋画質に影響され難い指紋画像の傾き角度を算出する指紋画像の回転角度算出装置及び指紋画像の回転角度算出プログラムを提供する。
【解決手段】入力指紋画像100から塗りつぶし画像200を作成する。塗りつぶし画像200における指紋領域202を近似した直線である領域近似直線221に基づいて回転角度θを算出する(説明図220)。回転角度θを補正した方がよい場合には補正する。そこで、塗りつぶし画像200において指紋領域202と背景領域201との境界線401,402を抽出する(境界線画像400)。境界線401,402の一部を近似した直線である境界線近似直線411,412を求める(説明用境界線画像410)。2本の近似直線の信頼性が判定され、信頼性のある近似直線がある場合には、信頼性のある近似直線を用いて角度を算出し(説明用境界線画像420)、回転角度θをこの角度に補正する。
(もっと読む)
電子透かしによる画像処理方法および画像処理装置
【課題】電子透かし埋め込みによる画質劣化の防止を可能にする切れ補正装置を提供する。
【解決手段】本発明の切れ補正装置は,既存の電子透かし技術を用いた電子透かし挿入装置に付加されて機能する装置である。切れ補正装置は,補正パラメータ,電子透かし挿入装置への入力画像,および透かし画像を入力として受け付け,補正された透かし画像を出力する。透かし画像の補正処理は,透かし画像のラベリング処理と,透かし挿入による変更画素の近傍領域のラベル数の計数に応じた画素値変更処理から成る。
(もっと読む)
指紋画像の回転角度算出装置、指紋画像回転装置、指紋照合装置、指紋画像の回転角度算出プログラム、指紋画像回転プログラム及び指紋照合プログラム
【課題】指紋領域の輪郭が欠けている場合でも、指紋画像の基準位置からの傾きの角度を正しく算出する指紋画像の回転角度算出装置を提供する。
【解決手段】入力指紋画像100から塗りつぶし画像200を作成する。塗りつぶし画像200において、指紋領域202と背景領域201との境界線401,402抽出される(境界線画像400)。境界線401,402の一部を近似した直線である境界線近似直線411,412が求められる(説明用境界線画像410)。境界線近似直線411,412に基づいて回転角度θが算出される(説明用境界線画像420)。2本の近似直線の信頼性が判定され、信頼されない近似直線は使用されずに、信頼された近似直線に基づいて回転角度θが算出される。2本とも信頼されない場合、塗りつぶし画像200における指紋領域202を近似した直線である領域近似直線221に基づいて回転角度θが算出される(説明図220)。
(もっと読む)
画像形成装置
【課題】ジャギーの発生を防止しつつ階調性の低下を防止し、また、スクリーンの境界部において違和感の生じ得ないスクリーン処理を行うことができる画像形成装置を提供する。
【解決手段】画像取得部110は原画像を取得する。スクリーン記憶部131は高解像度スクリーンと低解像度スクリーンとを記憶する。エッジ度算出部121は、画像取得部110により取得された原画像にエッジ抽出処理を施し、原画像の各画素のエッジの強さを示すエッジ度を算出する。閾値算出部122は、エッジ度が強くなるにつれて高解像度スクリーンの閾値の比率が高まり、エッジ度が弱くなるにつれて低解像度スクリーンの閾値の比率が高まるように、高解像度スクリーンの閾値と低解像度スクリーンの閾値とを混合して、原画像をスクリーン処理する際の各画素の閾値を算出する。スクリーン処理部123は、閾値算出部122により算出された閾値を用いて原画像をスクリーン処理する。
(もっと読む)
視線推定装置
【課題】車両運転者の視線を精度良く推定することができる視線推定装置を提供する。
【解決手段】車両運転者Dの顔画像から顔向きと目向きを検出してカメラ2を基準とした視線方向を推定するとともに、このカメラ2を基準とした視線方向の時系列変化から車両運転者Dが正面と認識していると仮定される基準正面を推定し、この基準正面を用いてカメラ2を基準とした視線方向を補正した上で視線信号として出力する。
(もっと読む)
画像処理装置、画像処理方法およびコンピュータプログラム
【課題】印刷文書上に不可読の形式で埋め込まれた情報を更新することの可能な画像処理装置を提供する。
【解決手段】微細な地紋パターンからなる透かしで情報が埋め込まれた画像を処理する画像処理装置100は、画像から、透かしで表される第1の情報を検出する透かし検出部120と、第1の情報に対して復号および誤り訂正を行った後、再度符号化して第2の情報を取得する符号化部130と、第2の情報に基づいて透かしを構成する地紋パターンの位置を特定し、透かしを除去した透かし除去画像を生成する透かし除去部140と、を備えたことを特徴とする。誤り訂正した第2の情報に基づいて地紋パターンの位置を特定することで、スキャン等して変形した地紋パターンを特定して消去を行い、その後、新しい情報をもつ透かしの地紋パターンを埋め込むことで、情報の更新が可能となる。
(もっと読む)
医用画像生成装置、方法およびプログラム
【課題】観察対象組織とその周辺組織との位置関係を把握しつつ、観察対象組織の状態をコントラストの低い部分まで明確に観察し得る観察用画像を作成することが可能な医用画像生成装置、方法およびプログラムを得る。
【解決手段】3次元画像モデルを構成する複数の画像構成要素の中から骨領域と対応する画像構成要素群を選択し、この選択された画像構成要素群に対してのみ、元々対応付けられていた各CT値を、元の値に対し1/4を乗算した値に付け替える。これにより、骨の度数分布を示す分布曲線34Aが、血管の度数分布を示す分布曲線33よりもCT値が低い領域に移動する。この信号値の付替えがなされた後の3次元画像データに基づき、最大値投影法による観察用画像を構成する。
(もっと読む)
画像形成装置
【課題】一部重複域を有する複数のレーザ露光部を備えた画像形成装置において、一部重複域に僅かな濃淡パターンができる場合でも、複雑な光変調器の変調調節を行うことなく、一部重複域の濃淡パターンを視認できないものにすることができる。
【解決手段】互いに隣接するレーザ露光部11、12、13を用いて各分担走査域に画像形成を行わせる画像形成手段(出力コントロール部205)と、一部重複域に形成された画像から得られる該一部重複域における濃淡パターンと同一の濃淡パターンを、一部重複域と同間隔で、かつ第1の方向と直交する第2の方向に設定するシェーディング補正手段とを備え、画像形成手段は、シェーディング補正手段によって設定された濃淡パターンに従って画像データを補正する。
(もっと読む)
癌検出のために確率的アトラスを使用する方法および装置
【課題】特徴を検出する方法および装置を提供すること。
【解決手段】一実施形態による方法は、対象を表すデジタル画像データにアクセスし、基本対象からの形状偏差に関して形状モデルを含む基準データと、基本対象内の特徴に関しての確率を含む確率的アトラスとにアクセスし、位置決め形状を取得するために、形状モデルを使用して対象の形状を表すことによって、対象に関して形状位置決めを実行し、確率的アトラスに関連する幾何学的要素と位置決め形状に関連する幾何学的要素との間に対応を生じさせることによって、対象内の特徴に関して確率を決定する。
(もっと読む)
画像認識方法および把持装置
【課題】分岐点を有するワークの形状を、迅速、且つ、簡易に認識することのできる画像認識方法および把持装置の提供。
【解決手段】分岐点を有するワークを撮像し、二値化し、二値化画像からワークの下端を検出し、ワークの下端からワークの輪郭を追い、輪郭線が急に方向変化する点を分岐点と判断する画像認識方法において、二値化画像から、X方向の最大値、X方向の最小値、Y方向の最大値、およびY方向の最小値を抽出し、これらを辺に有する方形領域を定め、方形領域に属する端点を候補点とし、候補点からワークの下端を判定することを特徴とする画像認識方法および当該方法を実施するための把持装置。
(もっと読む)
画像処理装置、画像処理装置の制御方法、および画像処理装置の制御プログラム
【課題】スキャン画像の文字領域を適切に補正することができる画像処理装置を提供する。
【解決手段】スキャン画像の中の文字が存在する領域に対して2値化処理を行ない(S305)、画像データD1を得る。その領域に対して文字認識処理(OCR)を行ない(S307)、文字のイメージデータD2を得る。イメージデータD2により画像データD1のがたつき補正を行ない、画像データD3を得る。
(もっと読む)
車載用ナビゲーション装置、路面標示識別プログラム及び路面標示識別方法
【課題】道路の走行環境が変わる中で、カメラで撮像された道路の路面の標示を的確に検出し、車両の進行方向の認識精度を向上する。
【解決手段】車載用ナビゲーション装置100は、車両に搭載されたカメラ6より撮像された車両の後方の映像の中で道路標示の認識に不要なライト照射部分の画像を検出し、検出された画像領域を避けた所定形状の画像領域を切り出し順次記憶部7bに記憶する。そして、新たに得られた切出画像と既に記憶部7bに記憶されている切出画像とを合成し、その合成画像から道路標示の画像を検出及び認識する。
(もっと読む)
地理空間モデルの地形データにおけるボイドの非線形な修復を提供する地理空間モデリングシステム及び関連する方法
地理空間モデリングシステム20は、地理空間モデルのデータベース21及びプロセッサ22を含む、プロセッサは、少なくとも1つのボイドの外から少なくとも1つのボイドに伝播する輪郭データに基づいて地理空間モデルの地形データ42aにおける少なくとも1つのボイド41aでデータを修復するため、地理空間モデルデータベース21と協働する。  (もっと読む)
(もっと読む)
車載霧判定装置
【課題】誤判定を低減することができる車載霧判定装置を提供する。
【解決手段】車載カメラ12によって撮像された画像の一部を霧判定に用いる判定画像として抽出する(S100)。その判定画像からランプなどの高輝度物が撮像されている領域をマスクする(S200)。このマスク処理後の判定画像を周波数解析し(S400)、周波数解析結果に基づいて霧判定を行う(S500)。マスク処理(S200)により、霧であるのに比較的はっきりと撮像されている箇所を解析してしまうことを防止できることから、霧であるのに霧でないと判定してしまうことを防止できる。
(もっと読む)
車載霧判定装置
【課題】誤判定を低減することができる車載霧判定装置を提供する。
【解決手段】車載カメラ12によって撮像された画像の一部を霧判定に用いる判定画像として抽出する(S100)。その判定画像からランプなど霧判定においてノイズ要因となる箇所をマスクする(S200)。このマスク処理後の判定画像から、周波数解析(S400)において用いる各入力信号に対して、マスク処理によって生じた不連続箇所の数を一次細分化度とし、さらに、全部の一次細分化度の中で、その一次細分化度が所定値よりも高いものの割合を全体細分化度とする(S300)。また、判定画像の全体の面積に対するマスクされた画像の面積の割合をマスク割合指標として算出する(S620)。そして、全体細分化度が基準値ST3よりも高い場合、または、マスク割合指標が基準値ST4よりも高い場合には、信頼性のある霧判定が行えないので、霧判定を行わない。誤判定が低減できる。
(もっと読む)
ラスタ化された画像の垂直成分と水平成分とを分離する方法
【課題】ラスタ化された画像の垂直成分と水平成分とを分離する方法を提供する。
【解決手段】画像を分離する方法であって、複数の画素を含む少なくとも1つの多角形のビットマップ画像を距離フィルタにかけ、モジュロ演算によるフィルタリングの後で形成された前記多角形をスケルトン化し、前記スケルトン化された画像と特定の頻度の1ビットの太さの水平線及び垂直線からそれぞれ成る2つのマスクとで論理的にAND演算を行って、水平エッジの画像及び垂直エッジの画像を形成し、得られた画像を2より大きいサイズの粒子を除去する粒子フィルタでフィルタリングするステップ、を含む。
(もっと読む)
画像検査装置および画像形成装置
【課題】従来よりも簡易的な方法で、且つ迅速に検査画像から事前印刷画像を除去した画像を生成し、検査画像の精度を求める。
【解決手段】まず、制御部は、原稿画像データに二値化を行う(SA1)。そして、赤外読取部は、原稿画像と事前印刷画像とが重畳して形成された検査画像に、赤外光源の光を照射して、検査画像の黒およびグレー以外の色を除去した読取画像を表す読取画像データを生成する(SA2)。次に、制御部は、当該読取画像データに二値化を行い、読取画像に含まれるグレーの事前印刷画像を除去する(SA3)。そして、制御部は、検査画像から事前印刷画像のみを除去した画像を表す画像データと、二値化後の原稿画像データとを照合し(SA4)、検査結果を出力する(SA5)。
(もっと読む)
281 - 300 / 782
[ Back to top ]