
Fターム[5C054HA05]の内容
閉回路テレビジョンシステム (47,623) | 用途 (7,416) | 分析、測定、検査 (176)
Fターム[5C054HA05]の下位に属するFターム
着順判定 (13)
Fターム[5C054HA05]に分類される特許
1 - 20 / 163
検査装置
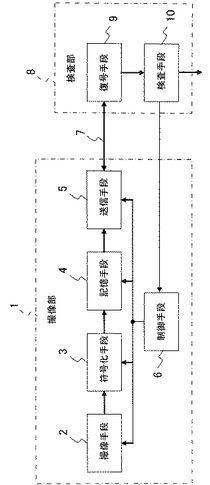
【課題】検査に必要な画像データを、撮影条件を変更しながら複数回撮影することにより、適正な画像データを用いた高精度な検査装置を得る。
【解決手段】撮影条件の異なる複数の画像を撮影する撮像手段2と、撮像手段2の撮影画像を複数の領域に分割して符号化する符号化手段3と、符号化手段3の符号化データを複数画像分だけ格納する記憶手段4と、記憶手段4に格納された符号化データを送信する送信手段5と、送信手段5からの符号化データを復号する復号手段9と、復号手段9により復号された画像から被写体の検査を行う検査手段10と、検査手段10からの検査命令および送信命令に応答して記憶手段4内の符号化データを検査手段10へ送信する制御手段6とを備える。検査手段10は、記憶手段4に格納された符号化データのうち、複数の画像データの中から任意の領域を指定して送信させる。
(もっと読む)
内視鏡装置、内視鏡装置の制御方法、およびプログラム

【課題】計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供する。
【解決手段】先端部21は、光学系によって領域S1に結像される2つの像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部25と、領域S1に結像された第1の像に基づく第1画像および領域S1に結像された第2の像に基づく第2画像を生成する撮像素子22とを有する。制御部30は、撮像素子22に複数枚の第1画像を生成させると共に、複数枚の第1画像に基づいて、ぶれの有無を判定した後、撮像素子22に第2画像を生成させる。続いて、制御部30は、撮像素子22に第1画像を生成させると共に、第2画像の生成の前および後に生成された第1画像に基づいて、ぶれの有無を判定する。制御部30は、2回のぶれの有無の判定で、ぶれがないと判定した場合に、計測部31に計測を行わせる。
(もっと読む)
電子顕微鏡遠隔表示装置
【課題】電子顕微鏡本体に付属するコンピュータなどを直接ネットワークに接続することなく、電子顕微鏡の画像を遠隔地に表示可能な電子顕微鏡遠隔表示装置を提供する。
【解決手段】電子顕微鏡12の画像表示部16aに表示される画像データをキャプチャ可能なキャプチャ手段18を備えたキャプチャ部20と、キャプチャ部20にネットワーク26を介して接続され、キャプチャ手段18によってキャプチャされた画像データを表示可能な遠隔画像表示手段22aを備えた遠隔表示部22とを備えた電子顕微鏡遠隔表示装置10である。
(もっと読む)
ステレオカメラ及びステレオカメラの校正方法
【課題】障害物までの距離を測距するステレオカメラが取り付けられたガラスに歪みが発生しても、光軸のずれによる測距精度の低下を抑制する。
【解決手段】フロントガラス10の上部内面に、独立した左右一対のカメラ12L及び12Rを取り付けると共に、カメラ12L及び12Rの間に位置するフロントガラス10の内面に、歪み検出方向が異なるように配置された2つの歪みセンサ16及び18を取り付ける。そして、制御装置20は、歪みセンサ16及び18で検出した歪みA及びBと補正値とを関連付けた補正マップを参照し、カメラ12L及び12Rで撮像された一対の画像について、矩形領域の部分画像を切り出す位置を補正値だけずらすことで、光軸のずれを校正して測距精度の低下を抑制する。
(もっと読む)
画像処理システム及び画像処理方法
【課題】 特に人間の運動の適否を判断するのに適した画像処理システム及び画像処理方法を提供すること。
【解決手段】 トレッドミル4と、トレッドミル4上で行われる利用者5の運動を撮影する撮影装置2と、撮影装置2により得られた利用者5の運動を示す動画データを処理する画像処理装置1と、画像処理装置1により得られた画像処理結果Rを利用者5がトレッドミル4上にて見ることができるように表示するモニタ3と、からなる画像処理システムであって、画像処理装置1は、利用者5の過去の運動を撮影したオリジナル動画データから得られる左足軸の運動又は右足軸の運動の開始時から終了時までの動画データのうち、いずれか一方の軸足による動画データの左右を反転させた反転動画データと、他方の軸足による運動の開始時から得られる現在の動画データとを重ね合わせた重畳動画データをモニタ3に表示する画像処理システム及び画像処理方法。
(もっと読む)
撮像方法
【課題】可視光を散乱させる微粒子が分散した気体又は液体の向こう側にある対象物を鮮明に撮像する。
【解決手段】屋内に、撮像対象の対象物Xがある。対象物Xは黒体放射する。対象物Xを遠赤外線を撮像できる赤外線カメラ1にて撮像する。照明光源4の手前にはフィルタ5があり、照明光源4からの照明光は遠赤外線が遮断される。対象物Xと赤外線カメラ1の間には霧状の水滴が存在する。この状態で赤外線カメラ1で撮像を行うと、対象物Xからの遠赤外線のみによって対象物Xが撮像されるので、得られる画像は鮮明である。
(もっと読む)
表面パターンの検出方法及び装置
【課題】本実施形態では、検査対象物が各種のものであっても、柔軟に対応して検査目的を達成できる表面パターンの検出方法及び装置を提供する。
【解決手段】この実施例では、予め撮像した参照用検査対象物の撮像信号に基づく参照用パターンデータを用意し、検査用対象物を撮像した撮像信号に基づくリアル撮像パターンデータを取得し、前記リアル撮像パターンデータを前記検査用対象物のリアル速度情報に基づき圧縮及び又は伸張して修正パターンデータを生成し、前記修正パターンデータと前記参照用パターンデータを比較して、類似か非類似を判定し、判定結果を示す信号を出力する。
(もっと読む)
画像処理装置
【課題】異常動作の原因の特定やメンテナンス等に必要なデータを容易に取得可能になる画像処理装置を提供する。
【解決手段】画像処理装置1は、処理部10の異常を監視する診断部として機能する中央処理装置14を備えている。診断部としての中央処理装置14は、処理部10の異常動作を検知する異常検知部18と、処理部10が保持しているデータの少なくとも一部を、抽出データとして外部装置に出力するデータ抽出部19とを有している。異常検知部18は、処理部10の異常動作の内容を所定の判定基準に基づいて「階層1」、「階層2」、「階層3」の3段階のエラーレベルに分類する。データ抽出部19は、エラーレベルが、予め定められたあるレベルに達すると、処理部10が保持しているデータの少なくとも一部を抽出データとして自動的に外部装置としての外部記憶装置3に出力する。
(もっと読む)
画像処理装置
【課題】検査タクトが速い場合などでも、全ての画像を出力することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、第1の出力部131から一部の出力画像を出力できない混雑状態にあるか否かを判断する判断部51と、判断部51の判断結果に応じて画像出力部13における出力画像の出力先を第2の出力部132へ切り替える退避処理部52とを有している。退避処理部52は、判断部51で混雑状態にないと判断されれば、出力画像の出力先を第1の出力部131とする通常モードを選択し、判断部51で混雑状態にあると判断されれば、出力画像の出力先を第2の出力部132とする退避モードを選択する。つまり、画像処理装置1は、混雑状態では出力画像を第1の出力部131ではなく第2の出力部132から外部記憶媒体4に出力することによって、出力画像を外部記憶媒体4に退避させる。
(もっと読む)
画像管理装置、画像管理方法、画像管理プログラム及び記録媒体
【課題】監視画像の閲覧された回数に応じた表示態様で、表示部へ表示させ、監視画像を適切に管理する装置及び方法等を提供する。
【解決手段】記憶部14は、監視画像がユーザによって閲覧された回数を、当該画像と対応付けて記憶し、制御部15は、監視画像を、当該監視画像が閲覧された回数に応じた表示態様で、ディスプレイ2へ表示させる。
(もっと読む)
遠隔タイムシフト監視システム
【課題】現場における作業の作業シークエンスにおいて、監視項目となる部分をチェックポイントとしてマーキングを行い、マーキングにより作成したマーク情報を参照してチェックポイントの画像を抽出し、監視モニターに表示した一画面に抽出した複数画像を表示するマルチビューを実現することが一つの課題である。
また、作業員への監視結果の通知および監視結果に基づく指示を通知することにより、作業員に現在進行中の作業の状態や評価、あるいは適切な作業をするための指示をフィードバックして現場の作業を安全かつ効率的なものとする監視システムを提供することも課題となる。
【解決手段】作業現場A1001、作業現場B1002、ネットワーク1003、以下に説明する各種機能を制御するサーバとして構成される画像管理手段1004、監視所1005という構成である。
(もっと読む)
外因パラメータのみのサラウンドビューカメラ自動較正
【課題】複数のカメラを備えているカメラシステムを較正する方法を提供すること。
【解決手段】所定の固有較正を有する複数のカメラを備えているカメラシステムを較正する方法であって、カメラは、車両などの物体に備え付けられ、物体の周囲をカバーする、方法は、(a)既知の寸法だけ間隔を空けて置かれ、物体の周囲およびカメラの視野内における単一の平面に位置を定められる一セットのマーカの位置を決めるステップと、(b)カメラのためのそれぞれのセットのマーカからカメラの外因パラメータを計算するステップと、(c)複数のカメラのうちのその他のカメラの各々に対してステップ(a)および(b)を繰り返すステップとを包含する、方法。
(もっと読む)
画像処理装置及びその制御方法、プログラム
【課題】 撮像画像中の被写体の身長を好適かつ精度良く測定する。
【解決手段】 撮像画像に含まれる等高線指標に基づいて作成された等高線データを記憶する。記憶された等高線データを、撮像画像中に表示させる。
(もっと読む)
画像処理方法及び装置
【課題】画像の高周波成分を維持しつつノイズ成分を除去する。
【解決手段】実施形態によれば、画像処理方法は、N(Nは3以上の整数)枚の入力画像の平均画像を平滑化し、平滑化画像を得ること(S203)と、N枚の入力画像から平滑化画像をそれぞれ減算し、N枚の高周波画像を得ること(S204)とを含む。画像処理方法は、N枚の高周波画像に対して因子分析を行い、N枚の高周波画像にそれぞれ対応する因子負荷量を算出すること(S205)と、因子負荷量に基づいてN枚の高周波画像を合成し、合成画像を得ること(S206)とを含む。画像処理方法は、平滑化画像と合成画像とを加算し、出力画像を得ること(S207)を含む。
(もっと読む)
放射線撮像装置
【課題】 簡易画像処理表示の高速化を図る。
【解決手段】 放射線撮像装置は、撮像素子で撮像された電荷信号をデジタル信号に変換するための信号処理回路と、その変換された信号データを間引き転送レートに従い、信号データを間引き制御するセレクター回路と、その信号処理回路により変換された撮像素子の暗電流に対する信号データと、間引き制御された信号データとに基づき暗電流補正を施した画像データを簡易表示画像として表示する表示制御部と、を備える。
(もっと読む)
顕微鏡写真装置および顕微鏡写真装置制御方法
【課題】複数の撮影範囲に対して多点タイムラプス撮影を行なう際、撮影間隔時間等に制限される事なく、各々の被検物の撮影を行なえる顕微鏡写真装置および制御方法を提供すること。
【解決手段】被検物を保持するためのステージと被検物に集光するための対物レンズとが相対的に3次元方向に移動可能な顕微鏡本体と、被検物を撮影して被検物画像を取得する手段と、ステージ等が相対的に移動することにより顕微鏡本体の視野範囲を設定し、これに対応するステージの位置情報を記憶する手段と、視野範囲における顕微鏡本体および撮影手段の設定情報を記憶する手段と、視野範囲をタイムラプス撮影する際の撮影条件を記憶する手段と、記憶された位置情報、設定情報および撮影条件に基づいて、視野範囲ごとのタイムラプス撮影像を取得する手段と、撮影された最新のタイムラプス撮影画像を視野範囲ごとに一括表示する手段とを備える。
(もっと読む)
トンネル壁面の展開画像取得システム
【課題】トンネル壁面の展開画像を取得するシステムについて、得られた立体視可能な展開画像が現実の壁面の状態を正確に反映できるようにし、その反映の度合いを簡単に判定できるようにする。
【解決手段】システム10は、トンネルを走行する車両11と、車両11に搭載されたビデオカメラ12と、各ビデオカメラ12が撮像した画像データを処理可能な画像処理部13とからなる。画像処理部13は、画像データの各コマ上の第1および第2ラインから短冊形の第1および第2視差画像をサンプリングし、両ラインの中間から短冊形の直視画像をサンプリングする。各画像を横方向に配列してカメラ12ごとに第1および第2視差連続画像、直視連続画像を合成する。各連続画像を縦方向に配列して、第1および第2視差展開画像、直視展開画像を合成する。第1および第2視差展開画像を赤または青の着色画像として出力して立体視可能とする。これとフルカラー画像として出力した直視展開画像を比較可能とする。
(もっと読む)
内視鏡画像再生装置
【課題】 汎用性の高い検査を行うことができる内視鏡画像再生装置を提供すること。
【解決手段】 被検査対象物の関心領域に基づいて設定されたテンプレートを記憶するための記憶部と、複数のフレームで構成される前記被検査対象物の検査動画をモニタに再生するための画像信号処理部と、前記検査動画中から前記関心領域と一致する箇所を特定する演算部と、前記検査動画を再生する際に、前記フレームを表示すると共に、前記演算部で特定された箇所を、前記フレームに対して強調する表示制御部と、を備えたことを特徴とする内視鏡画像再生装置。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
動画追尾装置、動画追尾方法および動画追尾プログラム
【課題】線上での追尾点の動きを容易に把握することができるとともに、動画中での任意の時点の追尾点の状態を容易に観察することが可能な動画追尾装置、動画追尾方法および動画追尾プログラムを提供する。
【解決手段】複数フレームの画像データに基づいて表示部20の画像表示領域Taに画像が表示される。画像表示領域Taの画像内で追尾点および追尾線が設定されると、設定された追尾線上での追尾点の位置を識別する追尾動作が各フレームの画像において実行される。また、複数フレームの画像における追尾動作により識別された追尾点の位置の時間変化を示す追尾結果時間変化線が表示部20の画像表示領域Tbに表示される。画像表示領域Tbに表示される追尾結果時間変化線の時間軸方向の位置が現在表示位置バーLにより指定されると、指定された位置に対応するフレームの画像が画像表示領域Taに表示される。
(もっと読む)
1 - 20 / 163
[ Back to top ]