
Fターム[5C122DA13]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | 測定 (460)
Fターム[5C122DA13]に分類される特許
121 - 140 / 460
距離取得装置

【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
画像処理装置、画像処理方法、および電子装置

【課題】異なる複数の波長の光を用いた肌検出技術において、外光の撮像部への入射を抑制する光学フィルタの最適な分光特性と照射光の最適な波長λ1,λ2を提案する。
【解決手段】LED13−1,13−2による波長λ1,λ2の光は被写体に反射され、光学フィルタ14を介して撮像部15に入射される。光学フィルタ14は、吸収端波長λcutよりも長波長側の光を撮像部15に透過させる。波長λ1の照射光により第1の画像が、波長λ2の照射光により第2の画像が生成される。次に、画像処理部17は、第1の画像と第2の画像との対応する画素の輝度Y1,Y2の差分である反射率差検出信号S=Y1−Y2を算出し、反射率差検出信号Sを所定の閾値と比較することにより2値化し、2値の一方の領域を肌領域として検出する。本発明は、例えば、人の手の動きを検出する検出装置に適用できる。
(もっと読む)
カメラ付き携帯電子機器
【課題】照度センサを必要とせず、カメラを利用して周囲の明るさを検知し、端末の置かれた状況を特定して必要な音量設定を行うことが可能なカメラ付き携帯電子機器を提供する。
【解決手段】本発明にかかるカメラ付き携帯電子機器100は、筐体122と、筐体の対向する面にそれぞれ配置され、被写界の光量を測定して光量に応じたレベルのインカメラ輝度信号・アウトカメラ輝度信号をそれぞれ出力するインカメラ124およびアウトカメラ126と、筐体のうちアウトカメラ126と同一の面に配置され音声を出力するスピーカ128と、インカメラ輝度信号・アウトカメラ輝度信号のレベルに応じてスピーカ128の音量を制御する音量制御部130と、を備えることを特徴とする。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
撮像装置
【課題】複数台の撮像装置を使用して、カラーの合成画像と距離情報を得ることができる撮像装置において、解像度の低下を招くことなく感度を向上し、さらには多くの色情報の取得が可能な撮像装置を提供する。
【解決手段】カラー画像を取得するとともに、被写体までの距離情報を取得するために、入射した光を光電変換して画像信号を出力する2系統の撮像素子と、2系統の画像信号に基づき被写体までの距離情報を求める距離情報取得部と、2系統の画像信号を合成してカラー画像を得る合成部とを備える撮像装置であって、撮像素子のうち第1の撮像素子は透明画素と光の3原色のうち第1の原色画素と第2の原色画素とを一組とした画素構成を有し、第2の撮像素子は透明画素と光の3原色のうち、第3の原色画素と、第1または第2のいずれかの原色画素とを一組とした画素構成を有している。
(もっと読む)
カメラモジュールの組立て方法及びカメラモジュール
【課題】歩留まりの向上を図ることができるカメラモジュールの組立て方法及びカメラモジュールを提供する。
【解決手段】 発明のカメラモジュール2は、レンズを支持するレンズ支持体7とレンズ支持体7を駆動する駆動機構とを有するカメラモジュール本体1と、カメラモジュール本体1の下端に固定する調整枠4とを備えており、カメラモジュール本体1を検査用撮像素子21の上方で検査用撮像素子21との間に空間をあけて保持し、カメラモジュール本体1のレンズに上方から検査用光を当てることにより生じた検査用撮像素子21からの画像信号に基づいて、カメラモジュール本体1の位置を三軸方向及び傾斜について調整した後、水平に保持した調整枠4の上端にカメラモジュール本体1を固定してある。
(もっと読む)
撮像装置
【課題】予期した明るさの画像が容易に得られるようにした撮像装置を提供すること。
【解決手段】撮像素子に設定される画像信号1フレーム当りの露光時間が任意に設定できるようにした撮像装置において、縦方向の寸法と横方向の寸法により面積が決まる方形の図形G1が表示可能な画像表示用のモニタを設け、露光時間の設定値と撮像レンズの絞り値により図形G1の縦方向の寸法が決り、画像信号のフレームレートにより図形G1の横方向の寸法が決るようにしたもの。露光量が図形G1の大きさに置き換えて表現されているので、感覚的に露光量がどの程度のものか容易に把握できる。
(もっと読む)
フリッカー測定方法およびその装置
【課題】簡単な構成で容易に画像に重畳するフリッカーを測定できるフリッカー測定方法を提供する。
【解決手段】表示装置10で表示される画像のフリッカーを測定するフリッカー測定方法であって、測定対象のフリッカーの周期より所定の追加時間分(露光時間)長い時間間隔で、撮像部100にて画像を撮像させて撮像信号を取得する画像撮像制御工程と、取得した撮像信号における光の強さを、追加時間(露光時間)毎のデータとしてフリッカーの波形を演算するフリッカー波形演算工程と、を実施する。
(もっと読む)
距離画像取得装置
【課題】新たな構成の付加なく、温度変化の影響を受けず高精度距離検出が可能となるよう、基線長変動量を検知する。
【解決手段】被写体に対向するレンズがアレイ配列されステレオレンズペア1',1''を構成するレンズアレイ1と、レンズアレイの像面側に複数のレンズにより結像される被写体の縮小像(個眼像)集合の複眼像を撮像する撮像手段4と、ステレオレンズペアによる個眼像ペアから距離画像を算出する距離画像演算器20と、撮像手段と略平行な平面内、かつステレオレンズペアの配列方向に略垂直の任意一断面において、レンズアレイと接触しレンズアレイを保持する保持部材6と、1つの個眼像ペアの視野を制限する視野制限手段と、視野が制限された個眼像ペアから算出した輝度値と、視野が制限されない個眼像から算出した輝度値との比に基づき、ステレオレンズペアの基線長変動量を検知し、距離画像演算器の距離出力値を補正する演算器を備える。
(もっと読む)
着順判定用画像作成装置
【課題】着順判定用画像を確実に作成することができると共に、撮影場所や撮影対象の変更が容易な着順判定用画像作成装置20を提供する。
【解決手段】本発明の着順判定用画像作成装置20は、ゴール付近に設けられた基準物体の画像を予め格納している基準物体画像格納部26と、カメラ23に画像を連続撮影させ、撮影されたそれぞれの画像について基準物体画像格納部26を参照し、基準物体が含まれる画像内の領域を切り出して部分画像を作成する画像切出部22と、切出された部分画像を撮影された順に並べて着順判定用画像33を作成し、作成した着順判定用画像33を表示装置11に表示する着順判定用画像作成部21とを備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、及び電子機器
【課題】ユーザを撮像して得られる撮像画像に基づいて、ユーザまでの距離を精度良く検出する。
【解決手段】LED21aは、被写体に対して第1の波長の光を照射し、LED21bは、被写体に対して第1の波長とは異なる第2の波長の光を照射し、カメラ22は、第1の波長の光が照射されている被写体を撮像して第1の撮像画像を生成し、第2の波長の光が照射されている被写体を撮像して第2の撮像画像を生成し、2値化部43は、第1及び第2の撮像画像に基づいて、被写体の肌領域を検出し、座標検出部44は、第1及び第2の撮像画像上の肌領域における、対応する画素の輝度値どうしの差分絶対値に基づいて、被写体までの距離を算出する。本発明は、例えば、ユーザを撮像して得られる撮像画像から、ユーザまでの距離を算出するコンピュータ等に適用できる。
(もっと読む)
拡大撮像装置
【課題】 ピントの調整をほとんどする必要がなく、かつ、簡単に倍率の変更ができる拡大撮像装置を提供すること。
【解決手段】 受光面31を有する撮像素子3と、読取対象Dc側から進行してきた光を各々が受光面31に結像させる複数の光学系5a,5b,5c,5dと、撮像素子3に対し相対移動可能であり、且つ、複数の光学系5a,5b,5c,5dを保持する保持部材6と、を備え、複数の光学系5a,5b,5c,5dの読取対象Dc側における合焦範囲Ra,Rb,Rc,Rdはそれぞれ、互いに重なる。
(もっと読む)
無線装置、無線システム、およびアンテナ追尾方法
【課題】高指向性のアンテナを使用するミリ波無線システムにおいて、リアルタイムにアンテナの方向を調整し、より安定した通信を確保する。
【解決手段】ミリ波を受信可能な無線装置であって、アンテナ13、23と、アンテナと常に同方向に向いた通信相手の他の無線装置を撮影するビデオカメラ11、21と、ビデオカメラから出力されるカメラ画像から他の無線装置の対象物の位置を検出する位置検出手段16、26と、位置検出手段が検出した位置と、最大受信感度が得られるアンテナ方位の場合に対象物のカメラ画像内における理想位置との差分を算出する算出手段16、26と、算出手段が算出した差分に基づいて、カメラ画像内における対象物の位置が理想位置となるように雲台15、25を制御させる制御情報を生成し、雲台に出力する生成手段16、26と、を有する。
(もっと読む)
画像撮影装置
【課題】照明光の強度が時間的に変動する場合であっても測定対象物の画像を高精度に得ることができる画像撮影装置を提供する。
【解決手段】画像撮影装置1は、光源部10、レンズ21、ハーフミラー22、レンズ23、液晶チューナブルフィルタ24、レンズ25、基準反射板31、基準反射板32、撮像部40、演算部50および表示部60を備える。基準反射板31および基準反射板32は、照明光学系により導かれた照明光が照射される位置であって撮像部40の視野の一部に設けられる。演算部50は、撮像部40による撮像により得られた画像のうち基準反射板31,32の画像部分の値を用いて測定対象物2の画像部分の値を補正する。
(もっと読む)
内視鏡装置およびプログラム
【課題】ユーザに対応点の確認を促すことができる内視鏡装置およびプログラムを提供する。
【解決手段】カーソル位置算出部18aは、入力装置を介して入力される指示に基づいて、画像データに基づく被写体の第1の画像において第1の位置を指定する。対応点算出部18bは、画像データに基づく被写体の第2の画像において、第1の画像における第1の位置に対応する第2の位置を算出する。表示処理部18cは、第1の位置が指定されたときに第1の位置に目印を表示し、続いて第1の位置と異なると共に第2の位置と異なる第3の位置に目印を表示し、続いて第2の位置に目印を表示する制御を行う。
(もっと読む)
移動装置及び方法
【課題】カメラ画像から段差や障害物を認識することにより遠距離でも認識できると共に、床色や模様等に拘わらず正確に認識することが可能な移動装置及び方法を提供する。
【解決手段】AF駆動部3によりレンズ2を移動させて焦点距離を変化させながら撮像素子5で撮像を行う。また、カメラ撮像画面を複数のエリアに分割し、焦点距離を変化させながら撮像素子5で得られた画像データ及び焦点距離に基づいてエリア毎にコントラストピークを計測する。そして、エリア毎のカメラと各エリアの対象物との距離を検出し、エリア毎に得られた対象物との距離データに基づいて3次元データ化を行い、地図データを作成する。
(もっと読む)
分布系の電気ネットワーク表現
【課題】多重材料物体を電気ネットワークの形で表現し解析する方法を提供すること。
【解決手段】多重材料物体の特性を決定するための方法(12)を提供する。本方法は、多重材料物体を取り囲む電極に個々の電気信号パターンをもつ印加電気信号組を提供することによって回転電界を発生させるステップ(122)を含む。本方法はさらに、印加した各電気信号パターンに対応する電極から電気信号の計測電気信号を取得するステップ(124)を含む。電気ネットワークは、印加電気信号組、計測電気信号組及び印加電気信号組の逆行列に基づいて決定される。本方法はさらに、電気ネットワークを解析することによって多重材料物体の特性を決定するステップ(128)を含む。
(もっと読む)
工業用小型電子撮像カメラ
【課題】外部インターフェイスケーブルの接続機構を備えた工業用小型電子撮像カメラにおいて、経済的に有利な構成で外部インターフェイスケーブルの引出方向を任意に選定して容易に組立ることができるとともに、カメラ機能を集約化し、信頼性の高い回路動作を期待できる。
【解決手段】レンズマウント10と基板実装フレーム20と三面カバー30と外部インターフェイスコネクタ50を取り付けたコネクタ取付金具40とにより、前面を除いた5面を対象に任意の面に外部インターフェイスコネクタを設けることのできる4ピース構造の箱形カメラ筐体1を構成し、かつ、カメラ筐体1内の撮像室2に、センサ基板15の他に、センサ基板を制御する制御基板21およびセンサ基板と制御基板の動作用電源を供給制御する電源基板22を収容してカメラ機能を集約化した。
(もっと読む)
位置分解測定結果を可視化する方法、および、相応の測定装置
本発明は、測定ユニット(1)を備えた測定装置(8)に関する。本発明では、測定ユニット(1)により対象物(16)について検出された位置分解測定結果が偽色画像へ変換され、この偽色画像が表示ユニット(3)によって対象物(16)へ戻るように投影される。 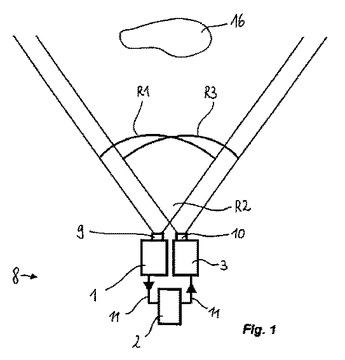 (もっと読む)
(もっと読む)
計測システム、画像補正方法、及びコンピュータプログラム
【課題】照明系及び撮像系の双方の測定対象物との位置関係が可変である場合の撮像画像による3次元計測を正確に行う。
【解決手段】照明系101の偏角、撮像系102の偏角を考慮して輝度を補正した場合に想定される空間変調器上の輝度分布(照明系101と撮像系102の双方を考慮した輝度分布補正値)を生成する。この輝度分布補正値と、位置関係に起因しない静的な輝度分布補正値とから、3次元計測システムにおける輝度分布の補正値を生成し、この輝度分布の補正値に基づいて、照明パターン画像の階調変換をし、階調変換した照明パターン画像に従った照明を行う。また、動径の情報と、測定対象物103の反射率とを基に、3次元システムの光量減衰率を求め、この3次元システムの光量減衰率と、基準とする光量減衰率との比較結果から、光源の強度を調整する。
(もっと読む)
121 - 140 / 460
[ Back to top ]