
Fターム[5C122DA13]の内容
スタジオ装置 (397,422) | スタジオ装置の用途/種類 (48,563) | カメラ (47,519) | 測定 (460)
Fターム[5C122DA13]に分類される特許
41 - 60 / 460
寸法測定装置、寸法測定方法および寸法測定プログラム
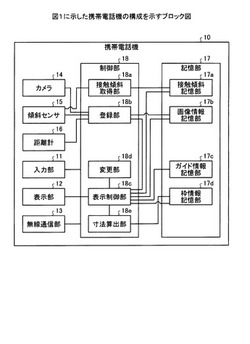
【課題】対象物の寸法を簡易かつ高精度に測定する寸法測定装置を提供する。
【解決手段】寸法測定装置は、取得部18aと、登録部18bと、表示制御部18cと、寸法算出部18eとを備える。取得部は、撮像部14により撮像される対象物と自装置とが接触した状態における撮像部の傾斜である接触傾斜を取得する。登録部は、撮像部により対象物の画像が撮像される際に、撮像部から対象物までの距離と撮像部の傾斜とを取得し、取得した距離および傾斜を対象物の画像ごとに対応付けて画像情報記憶部17bに登録する。表示制御部は、接触傾斜に対応する対象物の画像および距離を画像情報記憶部から抽出し、抽出された対象物の画像とともに対象物の画像に重畳される一対の枠を表示部12に表示させる。寸法算出部は、表示制御部により表示部に表示された枠の表示位置および接触傾斜に対応する距離に基づいて対象物の寸法を算出する。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置

【課題】高価で大きく重く複雑な調整が必要な赤道儀を使用せず、高精度に制御が必要なアクチュエーターも用いず、無駄な演算処理を省いてCPUの負担を低減し、天体を見かけ上静止した状態で明るく撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮像素子の撮像領域の一部を電子的にトリミングしたトリミング領域を移動させながら撮影する天体自動追尾撮影方法であって、前記撮像領域上での天体像の移動情報を取得するステップ;取得した前記天体像の移動情報に基づき、前記トリミング領域の移動データを設定するステップ;及び設定した前記トリミング領域の移動データに基づいて前記トリミング領域を移動させながら、各移動後のトリミング領域上で撮影を行うステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】非力なCPUでも、撮像エリアがその可動域を超えない範囲内で、なるべく長い撮影時間をリアルタイムかつ高精度に設定する。
【解決手段】撮像面の撮像エリア上での天体像の移動情報に基づいて、撮像エリアの所定時間あたりの光軸直交方向の理論平行移動量及び光軸と平行な軸回りの理論回転角度量を算出し、撮像エリアの可動域における、撮像エリアの基準姿勢位置からの光軸直交方向の実平行移動可能量及び光軸と平行な軸回りの実回転可能角度量を対応付けて保持する移動可能量テーブルを取得し、算出した撮像エリアの所定時間あたりの理論平行移動量及び理論回転角度量と、取得した移動可能量テーブルが保持する実平行移動可能量及び実回転可能角度量とを比較して、撮像エリアを該撮像エリアの可動域の範囲内で移動させながら天体自動追尾撮影を完了させるための撮影時間を設定する天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】追尾条件に応じて、無駄な演算処理を省いてCPUの負担を低減しながら、最適な駆動周期で撮像素子を駆動して天体を点像として撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮影装置に内蔵する所定の追尾手段を駆動させながら追尾撮影する天体自動追尾撮影方法であって、前記撮影装置の撮像素子の撮像面上に形成される天体像の、日周運動による所定時間あたりの撮像面上での移動距離を算出するステップ;及び算出した前記天体像の所定時間あたりの撮像面上での移動距離と、前記撮像素子の画素ピッチとに基づいて、前記追尾手段の駆動周期を設定するステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
撮像装置およびこれを備える顕微鏡システム
【課題】撮影に要する時間を短縮可能としながら、色再現性のより高い画像を生成することができる技術を提供する。
【解決手段】撮像装置100は、被写体の分光特性を計測する分光計測部120と、被写体像を複数の色に色分解して撮影し、複数セットの分光画像を生成可能な分光画像撮像部101と、分光画像撮像部101で色分解して撮影する際の色分解特性を、分光計測部120で計測して得られた被写体の分光特性に基づいて決定する色分解特性決定部であって、分光画像撮像部101で色分解して撮影する際の色分解数と、色分解それぞれに対応する分光帯域とを決定する、色分解特性決定部134とを備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】可視光と非可視光の分光特性を向上させ、可視光成分の少ない非可視光成分画像を生成する構成を実現する。
【解決手段】主に可視光成分を撮り込んだ可視光成分画素と、主に非可視光成分を撮り込んだ非可視光成分画素からなるモザイク画像を入力して、各画素の分光特性を補正した分光特性補正画像を生成し、さらに、生成した非可視光成分からなる分光特性補正画像に対してコントラスト強調処理を実行してコントラストを強調した非可視光成分画像を生成する。分光補正部は、理想の分光特性情報を適用して生成される分光特性補正行列Mを適用した行列演算により分光特性補正画像を生成する。
(もっと読む)
画像センサー深度計を内蔵した一体型ボアホールスキャン画像記録装置
【課題】 この発明に係る一体型ボアホール画像記録装置は制御機と深度計をプローブと一体化し、ボアホール画像観測記録システムを小型化し且つ経済的なものとすることを目的とする。
【解決手段】本発明の一体型画像記録装置は、ユーザ命令の入力と記録されたデータの出力を行うユーザインターフェース部と、本装置全体への給電を行うバッテリー部と、本装置全体の動作を制御し且つ画像解析から深度変化量を逐次測定するメイン制御部と、方位情報データを取得する3次元方位計センサーと、孔壁を撮像するカメラと、孔壁内を照らす照明部、から構成される。
(もっと読む)
テラヘルツ波発生装置、カメラ、イメージング装置および計測装置
【課題】容易にテラヘルツ波の出射方向を変更することができるテラヘルツ波発生装置、カメラ、イメージング装置および計測装置を提供すること。
【解決手段】テラヘルツ波発生装置1は、パルス光を発生する複数の光源3と、前記複数の光源3で発生したパルス光が照射されることによりテラヘルツ波を発生するアンテナ2とを備え、前記アンテナ2は、ギャップ23を介して対向配置された1対の電極22を複数有しており、前記複数の光源3の各々は、前記複数の1対の電極22のうちそれぞれ異なる前記1対の電極22間に前記パルス光を照射し、前記複数の1対の電極22のうち少なくとも2つの前記1対の電極22間に、互いにタイミングをずらしてパルス光を照射するよう構成されている。
(もっと読む)
スピーカ装置及び電子機器
【課題】スピーカの指向性を高める。
【解決手段】このスピーカ装置は、人数検出部110、周波数設定部120、変調部130、及びパラメトリックスピーカ140を有している。パラメトリックスピーカ140は、音声信号を超音波帯域に変調した変調信号が入力される。人数検出部110は、スピーカ装置の周囲に位置する人の人数を検出する。周波数設定部120は、人数検出部110が検出した人数に基づいて、変調信号の周波数を設定する。変調部130は、周波数設定部120が設定した周波数の変調信号を生成する。この変調信号は、パラメトリックスピーカ140に入力される。
(もっと読む)
車載用表示装置
【課題】給電装置と充電器とが接近した場合においても、給電装置と充電器との位置合わせをする際の案内を行うこと。
【解決手段】車載用表示装置100は、地上の給電装置より非接触方式で車載蓄電池を充電する充電器を有する車輌に搭載される。カメラ101は、車輌の周囲の画像を撮影する。給電装置位置検出部102は、カメラにより撮影した周囲の画像における給電装置の相対位置を検出する。表示部105は、充電器の絶対位置及び給電装置位置検出部102により検出した給電装置の相対位置を、カメラ101により撮影した画像と共に一画面に表示する。
(もっと読む)
熱画像撮像方法および熱画像撮像装置
【課題】赤外線撮像素子の熱応答速度によらず高い応答速度で熱画像を表示することの出来る熱画像撮像方法を提供することを目的とする。
【解決手段】本発明の熱画像撮像方法によれば、『「第一検出値と第二検出値との差」と、「赤外線撮像素子の熱応答速度」とから赤外線検出値を推定すること』とのことから、1スキャンタイム前と現スキャンタイムとの赤外線撮像素子の検出値の変化速度から現スキャンタイム時の赤外線撮像素子の赤外線検出値を推定し、現スキャンタイム時の対象物の温度を推定することが出来る。よって、赤外線撮像素子の熱応答速度によらずスキャンタイム毎に対象物の温度を推定することが出来、熱画像を高い応答速度で撮像することができる。
(もっと読む)
ステレオカメラ装置、視差画像生成方法
【課題】広い視野角と視野内の特定領域では高い測距精度を両立したステレオカメラ装置を提供すること。
【解決手段】二つの撮像手段C0、C1と、画像データを等距離射影画像に投影する二つの光学系21と、二つの等距離射影画像から第一の変形画像データ及び第二の変形画像データを生成する第一の画像生成手段31,33と、二つの等距離射影画像の所定領域から第三の変形画像データ及び第四の変形画像データを生成する第二の画像生成手段32,34と、第一の変形画像データと第二の変形画像データから第一の視差画像を生成する第一の視差画像生成手段35と、第三の変形画像データと第四の変形画像データから第二の視差画像を生成する第二の視差画像生成手段36と、第一の変形画像データと第三の変形画像データの倍率により定まる第一の視差画像の画素の画素値を、第二の視差画像の画素の画素値で置き換える画像合成手段37と、を有する。
(もっと読む)
画像処理装置
【課題】必要な領域について輝度範囲を最適化した合成画像を生成できる画像処理装置を提供する。
【解決手段】被測定物のうち高精度に表示したい領域や高精度に検査、計測を行ない領域が撮影範囲と比較して小さい場合には、全領域の合成画像を表示して領域の指定を受付け、当該領域に含まれる画素の輝度を最適化する合成処理を行った全領域の画像を生成する。そのために、画像データに対して指定領域の設定を受付ける入力部を含み、指定領域内における規格化された輝度分布値の大きさに基づいて合成輝度分布を算出し、合成画像データを生成する。
(もっと読む)
注目度検出システム、注目度判定装置、注目度判定装置用のプログラム、及び画像配信システム
【課題】対象者が画像を見ているときに、当該対象者が画像のどの部分を意識的に見ているかを自動的に特定可能にする。
【解決手段】注目度検出システム10は、画像を表示する表示装置12と、表示装置12に表示された画像を見ている対象者の眼球運動データを所定時間毎に取得する眼球運動計測装置13と、眼球運動計測装置13で取得した眼球運動データから、画像における対象者の注目度を判定する注目度判定装置14とを備えている。注目度判定装置14では、予め記憶された数式を用い、眼球運動データとして画像内の注視点の位置と瞳孔径を取得した時刻単位で、当該時刻から過去の時間における前記注視点及び前記瞳孔径に関する経時的変化に基づいて前記注目度が特定される。
(もっと読む)
撮像装置
【課題】撮像光学系を交換せずに解像度の異なる撮像を短時間でかつ適切な画像データ量で行うこと
【解決手段】第1の撮像素子1を撮像光学系300の像面に位置させた状態で標本を撮像する第1の撮像モードと、第1の撮像素子1よりも集積度が低い第2の撮像素子2を撮像光学系300の像面に位置させた状態で標本を撮像する第2の撮像モードとを実行可能な制御部600を有する。
(もっと読む)
撮像モジュール
【課題】 遮光機能を持たせるための部材を構成する部品の点数を減らし、部品コストや組み付けコストを抑える。
【解決手段】位置決め部18がレンズアレイ12の各レンズにおける有効面以外であるレンズの外周部に設けられている。この位置決め部18は撮像素子11とレンズアレイ12との間に配置される遮光部材13に設けられた開口部17に合致する。これにより、レンズアレイと遮光部材との位置決めが簡単に精度良く行われることになる。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
光学デバイス及びその製造方法
【課題】光学デバイス全体の小型化を図れるようにする。
【解決手段】光学デバイスは、第1の表面及び第1の表面とは反対側の第2の表面を有する光学素子2と、光学素子2における第1の表面の上方に配置された光学部材3と、光学素子2における第1の表面の上方に配置され、且つ、光学部材2の横側に配置された基板7とを備えている。光学部材3は、第1の表面と対向する第3の表面及び該第3の表面とは反対側の第4の表面を有し、平面視において、第2の表面の全てが第1の表面よりも内側に位置するか又は第4の表面の全てが第3の表面よりも内側に位置する。
(もっと読む)
撮像装置及び撮像システム
【課題】FAシステムが稼働する現場であっても、小さな設置スペースでレンズの絞り調整、フォーカス調整の程度を視認することができる撮像装置及び撮像システムを提供する。
【解決手段】少なくともレンズ及び絞りのうち1つを含む撮像光学系を介して検査対象物を撮像し、1次元又は2次元の多値画像を取得する撮像素子により取得した多値画像を画像処理装置へ送信する。撮像素子により取得した多値画像の明るさに関する情報を算出し、撮像素子により取得した多値画像の鮮鋭度に関する情報を算出する。算出した明るさに関する情報及び鮮鋭度に関する情報を表示する。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
41 - 60 / 460
[ Back to top ]