
Fターム[5C122FB06]の内容
スタジオ装置 (397,422) | 光学要素/光学系 (18,652) | 光学要素 (17,835) | レンズ (7,757) | 広視野角レンズ(複数のレンズで構成されるものを含む) (309)
Fターム[5C122FB06]に分類される特許
21 - 40 / 309
撮像装置及び撮像方法
【課題】 第1の処理領域では、第2の処理領域に対して相対的な拡大処理を行いつつ、撮像した画像に比べて解像度の低下を抑止する撮像装置及び撮像方法等を提供すること。
【解決手段】 撮像装置は、撮像光学系により結像される被写体像から画像信号を生成する複数の画素を有する撮像素子240と、複数の画素分の画像信号からなる原画像に対して変倍処理を施す変倍処理部340と、変倍処理後の画像を変倍画像として出力する出力部350と、を含み、変倍処理部340は変倍画像上の注目画素の位置に応じて異なる変倍率で変倍処理を行い、撮像素子240は、複数の画素として、変倍画像の画素数よりも多い画素を有する。
(もっと読む)
電子機器及び情報伝達システム

【課題】適切な音声装置の制御が可能な電子機器を提供する。
【解決手段】対象者を含む画像を撮像可能な撮像装置の撮像結果を取得する取得装置と、前記撮像装置による撮像結果から前記対象者の大きさ情報を検出する第1検出装置と、前記第1検出装置が検出した前記大きさ情報に基づいて、指向性を有する音声装置の位置及び/又は姿勢を調節する駆動制御装置と、を備えている。
(もっと読む)
カメラシステム
【課題】魚眼レンズ使用に伴う画像歪みを補正し動画像を効率良く圧縮すること。
【解決手段】カメラ装置2は、魚眼レンズを使用するレンズ部21と、魚眼レンズで撮影した歪曲収差のある画像を歪曲収差が小さくなるように歪補正処理を行う歪補正部24と、歪補正部24から出力された画像を圧縮符号化するエンコード部25を備える。表示装置4は、カメラ装置2のエンコード部25で圧縮符号化された画像を伸長復号化するデコード部42と、デコード部42から出力された画像を表示する表示部43を備える。
(もっと読む)
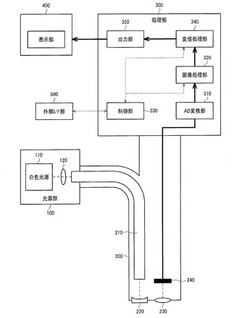
放射線環境下監視用カメラ装置
【課題】カメラの放射線劣化を抑えることが出来、これによりカメラとしてCCDイメージセンサ やCMOSイメージセンサ等の固体撮像素子を使用したものを利用することが出来、さらにレンズとして視野角の広いレンズを使用して広範囲なエリアの撮影を可能とする。
【解決手段】
【0012】監視用カメラの光学部分は、レンズ15と、このレンズ15を通して画像を撮影するカメラ17と、このカメラ17、18の撮像素子にレンズ15を通して画像を結ぶようにレンズ15とカメラ17の撮像素子とを光学的に接続する長尺なリレーレンズ16とを有する。これを放射線遮蔽壁30を貫通するように設置した保護ケース1の中に収る。そして前記レンズ15のみを保護ケース1の中の遮蔽体7、8の前方に配置し、前記カメラ17は、保護ケース1の中の遮蔽体7、8の後方に配置し、前記リレーレンズ16を保護ケース1の中の遮蔽体7、8を貫通するよう設ける。
(もっと読む)
撮影処理システム及び方法、管理装置及びプログラム
【課題】生体認証により算出される類似度に応じて撮像装置による撮影処理を制御し、セキュリティを向上させるようにした撮影処理システム及び方法、管理装置及びプログラムを提供する。
【解決手段】撮影処理システムは、人物から読み取られた生体情報と予め記憶された生体情報との類似度を判定する判定部と、判定部により判定された類似度が、認証の成否を判定するための認証閾値よりも高く、録画するか否かを判定するための録画閾値よりも低い場合、前記類似度の生体情報が読み取られた人物を含む撮影画像の録画を行う制御部とを有する。
(もっと読む)
全方位撮影装置及びその撮影条件調整方法
【課題】撮影条件を適切に調整する。
【解決手段】全方位撮影装置は、回転対称形状の凸面鏡1と、凸面鏡1の頂部周辺に配置された基準被写体である基準被写体部2a,2bと、凸面鏡1と基準被写体部2a,2bからの光を結像させるレンズ3と、レンズ3で結像した光を画像信号に変換する撮像素子4と、撮像素子4からの画像信号のうち基準被写体部2a,2bが撮影されている領域に応じて撮影条件を調整する調整部53,63とを備える。
(もっと読む)
撮影方法、撮影機、撮影装置、3次元画像形成方法、全方位3次元画像形成方法、投影装置、通信システム、表示装置、遠隔操作方法、及び監視方法
【課題】カメラ自身が写りこんでいる部分をステレオ画像の組合せ処理により取り除くことができ、よってカメラによる死角が生じず、低コストでありながら、広範囲な3次元画像をリアルタイムで撮影することができる撮影方法、撮影機、撮影装置、3次元画像形成方法、全方位3次元画像形成方法、並びにかかる技術を用いた投影装置、通信システム、表示装置、遠隔操作方法、及び監視方法を提供する。
【解決手段】カメラC1〜C3で、同期して撮影すると、カメラC1で撮影する領域と、カメラC2で撮影する領域とが一部重なることとなる。かかる場合、カメラC1から得られた画像を左目用の画像とし、カメラC2から得られた画像を右目用の画像とすれば、重複した撮影領域(第1の撮影領域)では3次元画像を撮影できることとなる。
(もっと読む)
全周囲観察光学系及びそれを備えた全周囲観察システム
【課題】先端部の径を大型化させずに、側方の全周囲にわたる観察対象の画像を、同時に、歪ませることなく高解像に取得可能な全周囲観察光学系及びそれを備えた全周囲観察システムの提供。
【解決手段】軸Oに対して対称な角錐面をなし、且つ、夫々が軸Oに対して夫々対称な側方観察用の第1の瞳位置P1の近傍に配置され、側方の全周にわたる観察対象からの光を側方の3つ以上の領域ごとの光に分割して後方に反射する3面以上の反射面1aと、軸O上に配置され、軸Oに対して夫々対称な側方観察用の第2の瞳位置P2に瞳位置P1における瞳を拡大してリレーするリレー光学系2と、瞳位置P1と共役な瞳位置に配置された3つ以上の側方観察用の開口絞り3aと、開口絞り3aに対応して配置された3組以上の側方観察用の結像光学系3bと、結像光学系3bに対応して配置された3つ以上の側方観察用の撮像素子3cを有する。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
撮像装置
【課題】明るく、MTF劣化を抑え、且つ、信頼性に優れた広角複眼像の撮像が可能な撮像装置を提供する。
【解決手段】被写体に対向する位置に設けられた、複数のレンズがアレイ配列されたレンズアレイ1と、レンズアレイ1の像面側に設けられた、複数のレンズのそれぞれにより結像される被写体の個眼像の集合である複眼像を撮像する撮像素子6とを有する撮像装置において、レンズアレイ1を被写体側に対して凸状に湾曲にするとともに、レンズアレイ1と撮像素子6の間に、レンズアレイ1と対向する面が凹状に湾曲した三角プリズム7を設けて、レンズアレイ1の各レンズの光軸が撮像素子6の受光面に対して垂直になるようにする。
(もっと読む)
撮像装置
【課題】均一な偏りの無いスペクトルのぼけ像を得る。
【解決手段】多眼カメラ10は、ボディ12前面に二次元状に配列されている複数の撮影開口11を持っている。撮影開口11の背後には、撮影レンズと、撮影レンズにより結像する被写体像を撮像する撮像素子とがそれぞれ内蔵され、各撮像素子から取り込んだ複数の画像データを合成して焦点面以外をぼけ像とした合成画像データを生成する。撮影開口11のx、y方向の間隔は、2値の疑似ランダム系列であるM系列に従った周期パターンにそれぞれ設定されている。つまり、各撮影開口11をx、y方向に配置する点列を0,1の2値に対応させてなる各撮影開口のx、y方向の配列パターンが、自己相関関数が略デルタ関数となる点列の個数を周期として周期的疑似ランダム系列をなす。
(もっと読む)
画像処理装置
【課題】歪補正処理装置のコストの増加を抑制しつつ、歪みを有する画像に対し、その歪みを適切に補正する技術を提供する。
【解決手段】入力画像に含まれる画像歪を補正して出力画像を生成する演算部(11)と、入力画像を示す入力画像信号をAD変換して得られた入力画像データを保持する入力側メモリ(12)と、出力画像に対応する出力画像データを保持する出力側メモリ(14)と、画素データを記憶する記憶領域を有する演算用メモリ(13)と、画像歪を補正するときに参照される補正処理メモリコピーテーブルデータ(15)とを具備する画像処理装置(4)を構成する。
演算部(11)は、処理対象画素情報(25)に複数の処理対象画素が示されているとき、複数の処理対象画素に対応する画素データを1回のデータ処理で処理する。
(もっと読む)
撮像装置及び撮像システム
【課題】天候等の影響によらずに常に画質が一定レベル以上の画像を撮像することが可能な撮像装置を得る。
【解決手段】撮像装置としての監視装置3は、撮像部12と、撮像部12による撮像のための補助光を照射する照射部13A,13Bと、照射部13A,13Bを制御する制御部14と、を備え、照射部13A,13Bは、第1の波長帯の赤外光を発光する照射部13Aと、第1の波長帯よりも大気中の水分によって吸収されにくい第2の波長帯の赤外光を発光する照射部13Bと、を有し、制御部14は、補助光を得るための照射部として、照射部13A及び照射部13Bを選択的に使用する。
(もっと読む)
検知装置、及び、検知方法
【課題】カメラが撮影した車外画像のみに基づいてカメラの位置ズレを簡易に検知できる技術を提供する。
【解決手段】カメラが撮影した時間的に連続する複数の車外画像の夫々に含まれる他の車両の像に基づいて、他の車両の停車を判断するため、検知装置はその停止を車外画像のみで簡易に判断することができる。更に、他の車両の停車を判断した場合に、導出した車外画像中の他の車両の像の停止位置と基準停止位置とを比較した結果に基づいてカメラの光軸の位置ズレを検知するため、検知装置は車外画像のみに基づいてその位置ズレを簡易に検知することができる。
(もっと読む)
画像補正方法、および関連する画像補正システム
【課題】魚眼レンズまたは超広角レンズのカメラで撮影した画像について、画像の幾何学的な歪みを軽減し、ユーザの要求に幾何学的に合わせるように補正する。また、メモリ割り当て技術によって画像補正計算の処理性能をさらに向上させる。
【解決手段】補正画像を同じサイズをもつ複数の補正ピクセルブロックに分割し、補正ピクセルブロックを補間計算で処理することにより、各補正ピクセルブロックのそれぞれにある各ピクセルのピクセル値を1つずつ生成する。
(もっと読む)
会議システム、監視システム、画像処理装置、画像処理方法及び画像処理プログラム等
【課題】広範囲な画角で撮像された魚眼歪画像等に基づいて正確かつ実効的な物体認識を行うことが可能な会議システム、監視システム、画像処理装置、画像処理方法及び画像処理プログラム等を提供する。
【解決手段】魚眼レンズによって撮像された魚眼歪画像Sに基づいて生成された二次元的に視認可能な平面正則画像等の任意の点任意の点Ci(ui、vi)の選択指示を受け付けると、Ci(ui、vi)の対応座標としての魚眼歪画像S上の点Si(xi、yi)を算出し、Ci(ui、vi)を中心として、当該魚眼歪画像Sを構成する画素情報群に基づいて、平面正則画像を構成する画素情報群を新たに生成する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】必要な領域を高解像度で表示しかつ画像歪みを補正可能とする画像処理装置を提供する。
【解決手段】レンズと撮像素子を含み、被写体を撮像する広角度のカメラと、カメラで撮像した画像をもとに特定の領域が広く見えるように歪ませた第1の画像を取得する画像処理部と、カメラによって複数の向きの方眼画像を取得する方眼画像取得手段と、方眼画像の格子点を取得し、取得した複数の格子点を用いて、画像処理部からの第1の画像をn次式で引き伸ばし補正する歪補正手段と、歪補正手段によって補正した画像を表示する表示部と、を具備する。
(もっと読む)
広角撮影画像へのスーパーインポーズ方法および装置
【課題】魚眼撮影で得られる全方位画像から、閲覧者の視線方向の一部分を表示する際に、単純かつ効率的にテロップなどの補助情報をスーパーインポーズする。
【解決手段】魚眼レンズで全方位外景を撮影し、歪曲円形画像Dを包含する矩形の撮影画像を得る。スーパーインポーズの対象となる補助画像Aを4分割して分割画像α,β,γ,δを作成し、撮影画像の4隅の余白領域に埋め込み、統合画像Cを作成する。再生時には、閲覧者が指定した視線方向に基づいて、歪曲円形画像Dから特定の表示対象部分画像Eを切り出し、これを正則矩形画像Tに変換する。一方、四隅の余白領域から4枚の分割画像α,β,γ,δを抽出して元の補助画像Aを復元し、正則矩形画像Tに重畳してスーパーインポーズし、表示用画像Sを作成する。動画コンテンツを作成する場合は、フレームごとに統合画像Cを作成し、フレーム単位で上記処理を実行する。
(もっと読む)
撮像モジュール、撮像装置および製造方法
【課題】像面倒れによる結像特性への影響を低減すること。
【解決手段】撮像モジュールは、光軸位置が同一直線上にない3以上のレンズを少なくとも含む複数のレンズを有するレンズ部と、複数のレンズがそれぞれ被写体像を形成する同一の撮像平面上の受光領域に、それぞれ複数の受光素子が形成された受光部と、3以上のレンズの光軸に対する撮像平面の傾きに基づく画像処理パラメータを用いて、複数のレンズの少なくともいずれかを通じて撮像された撮像画像に、撮像平面の傾きに応じた画像処理を施す画像処理部とを備える。
(もっと読む)
画像処理装置、及び、画像処理方法
【課題】ユーザが車両を一旦停車させた後に後進させながらハンドルを操舵して駐車させる縦列駐車をする場合に、車両を適切な位置に一旦停車させることによって適切な駐車をさせることができる技術を提供する。
【解決手段】画像処理装置は、表示画像において、車両が縦列駐車される場合の駐車開始位置において車両の側面と他の物体との間隔として必要な間隔を示す指標を表示画像に重畳してディスプレイへ表示させるため、ユーザは車両を縦列駐車させる際に、ディスプレイへ表示された表示画像の指標を参考にすれば駐車開始位置において車両の側面と他の物体との間隔として必要な間隔をとることができ、車両を適切に縦列駐車させることができる。
(もっと読む)
21 - 40 / 309
[ Back to top ]