
Fターム[5F031GA04]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669) | 複数のフォークを備えたもの (468) | 各フォークを独立して動かせるもの (148)
Fターム[5F031GA04]に分類される特許
21 - 40 / 148
基板処理装置及び半導体装置の製造方法
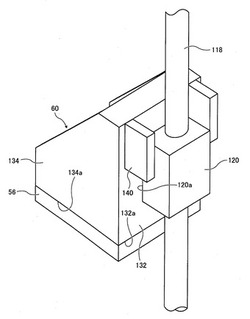
【課題】圧力差によって基板保持具を支持する支持部が傾斜するのを抑制することができる基板処理装置及び半導体装置の製造方法を提供する。
【解決手段】基板処理装置は、ロードロック室と、ロードロック室内の雰囲気を制御するガス供給部及びガス排気部と、ロードロック室内でウエハを保持するボートと、ボートを支持するシャフト及び固定台56と、これらシャフト及び固定台56を昇降する昇降装置と、固定台56に固定され昇降装置と面で接続する接続部材60と、を有し、ロードロック室は、大気圧雰囲気下でウエハを搬送するEFEM、及びウエハを処理する処理室に隣接し大気圧より圧力の低い真空雰囲気下でウエハを搬送する搬送室これらに隣接する。
(もっと読む)
真空処理装置

【課題】搬送チャンバー内にシリコン基板を搬送したときに、シリコン基板が面内温度分布に起因して反ることがない真空処理装置の提供。
【解決手段】真空雰囲気でシリコン基板26に回路を形成する複数の処理を、それぞれ順次実行する為の複数のプロセスチャンバー2〜5と、複数のプロセスチャンバー2〜5に隣接し、シリコン基板26をプロセスチャンバー2〜5内へ搬入しプロセスチャンバー2〜5内から搬出する搬送機構19を有する搬送チャンバー1とを備える真空処理装置。ガスを吹き出す吹出口22〜25と、搬送チャンバー1内のガスを外部へ排気する排気口31とを搬送チャンバー1内に備え、搬送機構19がプロセスチャンバー22〜25から搬出し停止させたシリコン基板26へ吹出口22〜25からガスを吹出させる構成である。
(もっと読む)
接合装置、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合装置700は、被処理ウェハW、支持ウェハS、重合ウェハTを受け渡すための受渡部720と、被処理ウェハW又は支持ウェハSの表裏面を反転させる反転部721と、被処理ウェハWと支持ウェハSとを押圧して接合する接合部101と、被処理ウェハW、支持ウェハS、重合ウェハTを搬送する搬送部722とを有している。反転部721は、支持ウェハS又は被処理ウェハWを保持する保持部材と、前記保持部材に保持された支持ウェハS又は被処理ウェハWを水平軸周りに回動させると共に鉛直方向及び水平方向に移動させる移動機構と、前記保持部材に保持された支持ウェハS又は被処理ウェハWの水平方向の向きを調節する位置調節機構770と、を有している。
(もっと読む)
基板処理装置及び基板処理方法
【課題】基板搬送ロボットの搬送速度を向上させ、処理効率を向上させることが可能な基板処理装置を提供する。
【解決手段】基板処理装置が、基板に熱処理を施す処理室と、第1基板支持部を有し該第1基板支持部で基板を支持して搬送する第1搬送ロボットが設けられ、該第1搬送ロボットが、前記処理室から基板を取り出すことのない搬送ロボットである第1搬送室と、第2基板支持部を有し該第2基板支持部で基板を支持して搬送する第2搬送ロボットが設けられ、該第2搬送ロボットが、前記処理室から基板を取り出す搬送ロボットである第2搬送室とを備えるように構成し、前記第1搬送ロボットに設けられた第1基板支持部の摩擦力を、前記第2搬送ロボットに設けられた第2基板支持部の摩擦力よりも大きくする。
(もっと読む)
接合システム、基板処理システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合システム1は、接合処理ステーション3に対して、被処理ウェハW、支持ウェハS又は重合ウェハTを搬入出する搬入出ステーション2と、被処理ウェハWと支持ウェハSに所定の処理を行う接合処理ステーション3とを有している。接合処理ステーション3は、被処理ウェハWに接着剤を塗布する塗布装置40と、被処理ウェハWを第1の温度に加熱する第1の熱処理装置41〜43と、被処理ウェハWを第2の温度にさらに加熱する第2の熱処理装置44〜46と、支持ウェハSの表裏面を反転させる反転装置34〜37と、被処理ウェハWと支持ウェハSを接合する接合装置30〜33と、各装置に対して被処理ウェハW、支持ウェハS又は重合ウェハTを搬送するためのウェハ搬送領域60とを有する。
(もっと読む)
基板処理装置及び基板移載方法
【課題】枚葉移載と一括移載を切り替える際に、パーティクル発生を抑制することのできる基板処理装置を提供する。
【解決手段】複数の基板が収容される基板収容器と、複数の基板が積載されるボートと、複数の基板が積載されたボートを収容し前記ボート上の複数の基板を処理する処理室と、前記基板収容器と前記ボートとの間で基板の移載を行う基板移載装置とを備え、前記基板移載装置は、1枚の基板を移載するための枚葉移載用プレートを駆動する第1の駆動部と、複数枚の基板を移載するための一括移載用プレートを駆動する第2の駆動部とを備え、1枚の基板を移載する場合は、第1の駆動部により枚葉移載用プレートを駆動し、複数枚の基板を移載する場合は、第1の駆動部と第2の駆動部により、枚葉移載用プレートと一括移載用プレートを同期して駆動するように、基板処理装置を構成する。
(もっと読む)
基板処理システム
【課題】移送モジュールが設けられた複数の工程設備の間に基板を処理するシステムが提供される。
【解決手段】基板処理システムは、複数の工程設備とバッファーステーションとを有する。各々の工程設備は、内部に搬送ロボットが設けられた移送モジュールとこれに連結される処理モジュールとを有する。バッファーステーションは、複数の隣接する移送モジュールの間に位置し、これらの間に基板を移送するために設けられる。前記複数の工程設備は、移送モジュールとバッファーステーションとが配置される方向に沿って設けられる連結ラインを基準として処理モジュールが連結ラインの第1側に位置する第1設備と連結ラインを基準として処理モジュールが前記連結ラインの第2側に位置する第2設備とを有する。第1設備に設けられる移送モジュールは、第2設備に設けられる移送モジュールに比べ連結ラインを基準として第1側に向かってさらに突出するように設けられる。
(もっと読む)
基板搬送ロボット
【課題】 位置決め精度を向上するとともに、外部の物体との干渉を防ぐことができる基板搬送ロボットを提供する。
【解決手段】 第1および第2アーム部36,37は、互いに相対的に旋回可能に設けられる。第1および第2アーム部36,37間の関節には、第2旋回駆動手段42が設けられる。第2旋回駆動手段42は、第2モータ76と、第2動力伝達部77とを有する。第2モータ76は、第1アーム部36に固定される固定部78と、固定部78に対して、第1アーム部36の延在方向に略平行な回転軸線L22まわりに回転する回転部79とを有する。第2動力伝達部77は、第2モータ76と第2アーム部37との間に介在し、第2モータ76の動力を、第2モータ76の回転部79から第2アーム部37に伝達する。このような第2旋回駆動手段42によって、第1および第2アーム部36,37が互いに相対的に旋回駆動される。
(もっと読む)
把持装置、搬送装置、処理装置、および電子デバイスの製造方法
【課題】機構が簡易かつ軽量な把持装置、搬送装置、処理装置、および電子デバイスの製造方法を提供すること。
【解決手段】把持装置1は、ワークの周縁に当接させる第1の把持体25bを有した第1の把持板26と、周縁に当接させる第2の把持体25aを有した第2の把持板24と、を有し、第1の把持体25bと、第2の把持体25aと、が互いに接離するように、第1の把持板26および第2の把持板24の少なくとも一方を移動させる把持部27を備えている。またさらに、把持装置は、把持部を昇降させる昇降部28と、把持部による開閉動作と、昇降部による昇降動作と、を制御する動作制御部14と、を備えている。そして、動作制御部は、第1の昇降動作、開閉動作、第1の昇降動作と同じ方向に昇降させる第2の昇降動作をこの順で機械的に制御する。
(もっと読む)
基板処理装置および基板搬送方法
【課題】搬送ロボットの待機時間を短縮できるとともに、装置の大型化が抑制または防止された基板処理装置および基板搬送方法を提供すること。
【解決手段】インデクサロボットIR1は、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入する。その後、3個の基板保持部27は、回転軸線L1まわりに180度回転する。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。メイン搬送ロボットTR1は、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板Wを搬出する。その後、インデクサロボットIR1は、再び上側の2個の基板保持部27に基板Wを一枚ずつ搬入する。
(もっと読む)
基板処理装置及び基板処理方法並びに基板処理プログラムを記録した記録媒体
【課題】基板処理のスループットを向上させることのできる基板処理装置を、提供する。
【解決手段】基板受渡台11と、基板を1枚ずつ処理するための基板処理室15、16、との間における搬出入を行うための基板搬送機構36に、前記基板を1枚ずつ保持するための基板保持具をN個(Nは3以上の整数。)設けた、基板処理装置、及び前記基板処理装置で用いる基板処理方法並びに基板処理プログラムにおいて、前記N個の基板保持具のうちの2個〜N−1個の基板保持具で複数枚(2枚〜N−1枚)の前記基板を同時に保持して、前記基板処理室に1枚ずつ前記基板の搬出入を行うことにした。
(もっと読む)
基板搬送用ハンドおよび基板搬送ロボット
【課題】簡易な構成により、異なる載置部を使い分けて互いに異なる位置で基板を支持可能な基板搬送用ハンドを提供する。
【解決手段】この基板搬送用ハンドは、ハンド本体部51と、互いに異なる位置で基板を載置可能な下段載置部521および上段載置部522と、下段載置部521に載置された処理済基板10aを下段載置部521と共に支持する載置部531と、ハンド本体部51に移動可能に設けられ、ハンド本体部51の第1の位置に移動された場合に、処理済基板10aとは異なる位置で上段載置部522に載置された未処理基板10bを上段載置部522と共に支持する載置部とを備える。
(もっと読む)
搬送装置
【課題】安定した昇降位置精度を確保することができるとともに、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる搬送装置を提供する。
【解決手段】搬送装置1においては、第1のアーム10の駆動軸310A及び旋回軸310Bと同軸上に第1のアーム10を昇降させる昇降軸52が配置されている。昇降軸52がとく同軸310A及び旋回軸310Bと同軸上に配置されているため、昇降軸52が搬送装置1の重心またはその近傍に位置する。さらに、同一平面内における第1のアーム10及び第2のアーム20の占有範囲を90度よりも小さい角度範囲に収めることで、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる。
(もっと読む)
塗布、現像装置
【課題】基板に対して反射防止膜を形成する工程、レジスト膜を形成する工程、露光後の基板に対して現像を行う工程を実施する塗布、現像装置において、装置の奥行き寸法を抑えること。
【解決手段】基板にレジスト膜を形成するためのCOT層B4と、レジスト膜の下側に反射防止膜を形成するためのBCT層B5と、レジスト膜の上に反射防止膜を形成するためのTCT層B3と、現像処理を行うためのDEV層B1,B2とを互に積層する。これら積層体の前後に各層に対応する受け渡しステージを積層した受け渡しステージ群を設け、受け渡しステージを介して各層の間で基板の受け渡しができる。またレジスト液を基板に塗布するユニットなどの薬液ユニットについては、横並びの3連カップを共通の処理容器内に配置し、これらカップ内でレジスト塗布などの液処理を行う。
(もっと読む)
搬送機構
【課題】アーム部自体の温度上昇を抑制して搬送精度を高く維持することが可能な搬送機構を提供する。
【解決手段】処理容器56内で被処理体Wに熱処理を施す処理装置に対して被処理体を搬出入させる搬送機構において、複数のアーム94、96、98を有して屈伸及び旋回が可能になされたアーム部36A、36Bと、アーム部の先端に連結されて被処理体を保持するフォーク部38A、38Bと、アーム部の内で処理容器内に侵入する部分に設けた熱遮蔽板104とを備える。これにより、アーム部自体の温度上昇を抑制して搬送精度を高く維持する。
(もっと読む)
基板処理装置及び基板処理方法
【課題】マルチモジュールを構成するモジュールが使用不可モジュールとなったときにおいて、基板の搬送を速やかに行ない、製品不良の発生を抑えること。
【解決手段】基板を搬送先モジュールに搬送する前に、当該搬送先モジュールが使用不可となったときには、基板の搬送先を、当該基板の次の基板が搬入されるべきモジュールに変更する。使用不可モジュールが発生したときに、前記搬送手段が例えば搬送サイクルの上流端のモジュールに対してアクセスする前であるときには、変更後の搬送先モジュール内にて前の基板が搬出できる状態となるまで搬送サイクルを進めるように制御を行う。また使用不可モュールが発生したときに、前記搬送手段が搬送サイクルにおいて前記使用不可モジュールよりも上流側に位置しているときには、変更後の搬送先モジュール内にて前の基板が搬出できる状態となるまで、搬送手段の搬送動作を待機するように制御を行う。
(もっと読む)
露光装置ユニット及びその基板交換方法
【課題】プリアライメント装置での基板の交換を効率的に行うことができる露光装置ユニット及びその基板交換方法を提供する。
【解決手段】搬送用ロボット15が、プリアライメント装置12でプリアライメントされた基板W1を第1のハンド31で受け取る動作と、第2のハンド32に支持されたプリアライメントされる基板W2をプリアライメント装置12に受け渡す動作と、を同時に行う。
(もっと読む)
検査装置および検査方法
【課題】半導体検査装置において装置のロット所要時間にはレシピ情報が必須となっている。(レシピ情報を指定しない場合に装置は予測時間を計算しない。)
【解決手段】検査パターンをDBとしてメモリに所持し、レシピ情報指定無しで処理ウエハ枚数のみを入力とした場合でも最短・最長のロット所要予測時間を提供する。また、レシピが指定された場合は特定された検査パターンによるロット所要予測時間を提供する。さらに、既にロット処理中の場合は処理済み時間を減算したロット所要予測時間を提供する。
(もっと読む)
被処理体の搬送方法および被処理体処理装置
【課題】 各種処理における処理時間を短縮しても生産性が頭打ちになる事情を抑制できる被処理体の搬送方法を提供すること。
【解決手段】 処理室を、被処理体をn枚同時に処理可能に構成し(ただし、nは2以上の自然数とする)、搬送装置を、被処理体を前記n+1枚以上保持可能に構成し、搬送装置を用いて、ロードロック室から搬送室に対し、処理前の被処理体をn枚搬出する工程と、(1)搬送装置を用いて処理室から搬送室に対し、処理済の被処理体を少なくとも1枚搬出する工程と、(2)搬送装置を用いて搬送室から処理室に対し、搬送装置に保持された処理前の被処理体を少なくとも1枚搬入する工程と、を備え、(1)及び(2)の工程を、処理室に収容された処理済の被処理体が、搬送装置に保持された処理前の被処理体に全て交換されるまで繰り返す(工程2)。
(もっと読む)
被処理体の搬送方法及び被処理体処理装置
【課題】 各種処理における処理時間を短縮しても生産性が頭打ちになる事情を抑制できる被処理体の搬送方法を提供すること。
【解決手段】 複数のロードロック室41a、41bを、被処理体Wを複数収容可能に構成し、ロードロック室41a、41bに、処理前の第1の被処理体を搬入し、搬送装置33を用いて複数の処理室32a、32bから搬送室31に対し、処理済の第2の被処理体を同時に搬出し、搬送室31からロードロック室41a、41bに対し、処理済の第2の被処理体を同時に搬入し、搬送装置33を用いてロードロック室41a、41bから搬送室31に対し、処理前の第1の被処理体を同時に搬出し、搬送室31から処理室32a、32bに対し、処理前の第1の被処理体を同時に搬入する。
(もっと読む)
21 - 40 / 148
[ Back to top ]