
Fターム[5F031JA17]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 1つの検出対象物に対し複数のセンサを設置 (451)
Fターム[5F031JA17]に分類される特許
101 - 120 / 451
搬送室および基板処理装置
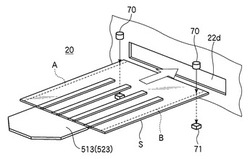
【課題】 大型の矩形基板の位置ずれや欠けなどの異常を確実に検出できる搬送室およびそのような搬送室を備えた基板処理装置を提供する。
【解決手段】 搬送装置50のスライドピック513に基板Sを載置し、搬送室20内からゲート開口22dを介してプロセスチャンバ10bへ搬入する際に、ゲート開口22dに対応して搬送室20内におけるその近傍に、基板Sとの相対的な位置関係が同じになるように基板Sの幅よりも狭い間隔で左右に配備された一対のセンサ70,70によって基板Sの両端部からそれぞれ5〜10mm内側の部位に光線を照射し、その反射率または透過率から、基板Sの位置ずれや欠陥などの検出を行う。
(もっと読む)
計測装置、露光装置およびデバイス製造方法

【課題】エンコーダシステムを用いたステージを位置決めする場合、スケール間に存在する幾何学的誤差に起因する計測誤差を低減する。
【解決手段】可動体に配置された複数のセンサと、構造体に取り付けられた複数のスケールとを有し、前記可動体の変位を検出することによって前記可動体の位置を計測する計測装置であって、前記複数のスケールは、第1方向における前記可動体の変位を検出するための2つの第1スケールと、前記第1方向とは異なる第2方向における前記可動体の変位を検出するための2つの第2スケールとを含み、2つのセンサによる検出値とが等しくなるように前記可動体を前記第1位置から前記第2位置に移動させたときに前記2つの第1スケールに対向している2つのセンサによってそれぞれ検出される変位の間の差に基づいて、前記2つの第1スケールの間に存在する幾何学的誤差に起因する計測誤差を低減する制御部とを備える。
(もっと読む)
スケール体、位置検出装置、ステージ装置、及び露光装置
【課題】スケール用のパターンが形成されたパターン形成面の法線方向の位置情報を高精度に計測する。
【解決手段】スケール体28eは、Yスケール39Y2が形成されたパターン板4eと、パターン板4eに設けられ、Yスケール39Y2を覆うカバーガラス5と、カバーガラス5の表面に形成され、互いに異なる波長域の第1の光及び第2の光に対して波長選択性を有する波長選択膜7と、を備え、波長選択膜7を介してカバーガラス5を透過する第1の光の透過率は、カバーガラス5のみを透過する第1の光の透過率より低く、波長選択膜7を介してカバーガラス5を透過する第2の光の透過率は、波長選択膜7で反射する第2の光の反射率より高い。
(もっと読む)
物体処理装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】基板の対する処理を高精度で行う。
【解決手段】 基板Pの下方には、基板Pの下面にエアを噴出する複数のエア浮上ユニット50が配置され、基板Pは、概ね水平となるように非接触支持される。また、基板Pは、定点ステージ40により被露光部位が下方から非接触保持され、その被露光部位の面位置がピンポイントで調整される。従って、基板Pに高精度で露光を行うことができ、かつ基板ステージ装置PSTの構成を簡単にすることができる。
(もっと読む)
真空処理装置及び基板搬送装置並びに成膜方法
【課題】パーティクルの発生を抑制するとともに交換部品及び交換回数の低減を図ることができる真空処理装置及び基板搬送装置並びに成膜方法を提供する。
【解決手段】基板搬送装置2は、基板Gを垂直姿勢で保持して、搬送レール6上を搬送可能なキャリア部材4を備えており、キャリア部材4に取付けられたキャリア側ガイドマグネット15,16,17,18が、搬送レール側6に取付けられたレール側ガイドマグネット21,22,23,24から水平方向の斥力を常時受けることで、キャリア部材4は左右の搬送レール6側と非接触状態で移動できる。また、レール側ガイドマグネット21,23を、搬送空間Tとプロセス空間Pとの境界部分に配置することでパーティクルの除去を行う。
(もっと読む)
ステージ装置、露光装置及びデバイス製造方法
【課題】気化熱による温度変化を抑制できるステージ装置を提供する。
【解決手段】液体LQを用いた液浸露光が実施される基板Pを保持して移動する基板ステージ2であって、保持された基板Pの周囲に設けられて液体LQを回収する第2溝部42と、第2溝部42の底部42aに設けられ、第2溝部42で回収した液体LQを、第2溝部42の外部に排出する排出孔45と、液体LQよりも比重の小さい材料で形成され、第2溝部42に配置されて第2溝部42に貯溜した液体LQの液位に応じて浮沈することにより排出孔45を開閉するフロート弁51とを有するという構成を採用する。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 移動体RSTのY軸方向の位置情報を、干渉計16yと、該干渉計に比べて計測値の短期安定性が優れるエンコーダ((24A,26A1)、(24B,26B1))とを用いて計測し、その計測結果に基づいてエンコーダの計測値を補正する補正情報を取得するための所定の較正動作を実行する。これにより、干渉計の計測値を用いて、その干渉計に比べて計測値の短期安定性が優れるエンコーダの計測値を補正する補正情報が取得される。そして、エンコーダの計測値と前記補正情報とに基づいて、移動体をY軸方向に精度良く駆動する。
(もっと読む)
搬送装置および搬送方法
【課題】被搬送物を搬送先にまで高精度に搬送することができる搬送装置および搬送方法を提供する。
【解決手段】基板トレイ搬送装置は、基板3を載せた基板トレイ17を搬送アーム26によって把持し、載置台5まで搬送する。搬送アーム26の先端部には、反射型光ファイバーセンサー25を有している。搬送アーム26は縁に到達する直前に減速する。その際、センサー25は載置台5の縁を検出する。搬送アーム26が減速しているので、センサー25による縁位置の検出は安定化する。制御装置37は、センサー25による縁位置の検出結果に基づき、載置台5の縁から載置台5の中心までの距離と、基板トレイ17からセンサー25までの距離とを加えた距離だけ、載置台5の縁から搬送アーム26を移動させるように、第一の移動機構28を制御する。
(もっと読む)
エンドエフェクタ、ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】ウェーハの搬送時において、エンドエフェクタにウェーハを載置している間に、エンドエフェクタに対するウェーハの載置位置を検出することができるエンドエフェクタ及びそれを用いたウェーハ搬送ロボット、並びにそれを備えたウェーハ搬送装置を提供する。
【解決手段】ウェーハを搬送するウェーハ搬送ロボットのアームに取り付けられウェーハを保持するエンドエフェクタにおいて、エンドエフェクタに対するウェーハの位置ずれを検出するために、エンドエフェクタのひずみを検出するひずみセンサを少なくとも1つ備えた。特に、ひずみセンサは3つ設けられ、そのうち1つのひずみセンサは、エンドエフェクタの中心線上に配置され、他の2つのひずみセンサは、中心線に対して互いに線対称となる位置に配置される構成とした。
(もっと読む)
移動体装置及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 駆動系により、アーム部材71から移動体WFSのXY平面に平行な一面に配置されたグレーティングRGに対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果に基づいて移動体が駆動される。この場合、アーム部材からグレーティングRGに計測ビームを照射する構成が採用されているので、ステージ定盤にエンコーダシステムを設ける場合とは異なり、移動体の駆動に起因する悪影響はない。従って、移動体を精度良く駆動することが可能になる。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報を高精度で計測する。
【解決手段】 露光ステーション200では、ウエハを保持するステージWFS1の位置情報は、計測アーム71Aを含む第1の微動ステージ位置計測系により計測され、計測ステーション300では、ウエハを保持するステージWFS2の位置情報は、計測アーム71Bを含む第2の微動ステージ位置計測系により計測される。露光装置100は、ステージWFS2が計測ステーション300から露光ステーション200へ搬送される際、このステージWFS2の位置情報を計測可能な第3の微動ステージ計測系を有する。第3の微動ステージ計測系は、複数のYヘッド96,97を含むエンコーダシステムとレーザ干渉計76a〜76dを含むレーザ干渉計システムとを含む。
(もっと読む)
露光装置、露光方法およびデバイス製造方法
【課題】
位置決め基準の異なる露光装置間での位置決めのエラーを防止し、プリアライメントのエラーによるダウンタイムを低減し、半導体製造工程における生産性を向上する露光装置および露光方法を提供する。
【解決手段】
基板の外周位置を検出する検出部と、前記検出部の出力にもとづいて前記基板の外周形状に関するデータを算出する算出部と、前記算出部の出力にもとづいて前記基板の位置を調整する調整部と、前記調整部によって位置調整された前記基板をステージ上に搬送する搬送部とを備える露光装置において、前記ステージ上で、基板に形成されたマークの位置を検出するマーク検出部と、前記マーク検出部の出力にもとづいて前記算出部の算出条件または算出方法を変更する変更部と、を備えることを特徴とする。
(もっと読む)
搬送方法及び装置、並びに露光方法及び装置
【課題】例えば可撓性を持つ長尺のフィルム状部材を目標とする経路に沿って高精度に搬送する。
【解決手段】フィルム状基板Pを搬送するラダー式ステージ装置28であって、フィルム状基板Pを支持するために、フィルム状基板Pの移動方向に直交する方向に長手方向が配置される複数のロッド30A〜30Lと、ロッド30A〜30Lを閉じたループ状の軌跡に沿って連結するチェーン32A,32Bと、チェーン32A,32Bを介してそのループ状の軌跡に沿ってロッド30A〜30Lを移動する駆動モータ36Aとを備える。
(もっと読む)
脆性物位置決め装置及び脆性物位置決め方法
【課題】安価で単純な機構で脆性物にストレスを与えず短いサイクルタイムで位置決めする脆性物位置決め装置を提供すること。
【解決手段】脆性物位置決め装置は、脆性物30を支持する第1の球状駆動伝達手段1及び第2の球状駆動伝達手段2と、X軸Y軸に対応して互いに90°離れて並び各々第1,第2の球状駆動伝達手段1,2に加圧接触して回転力を付与する第1組、第2組のX軸駆動ローラー3,5及びY軸駆動ローラー4,6と、脆性物30の縁部の接触または接近を検出して出力する複数の検出手段11〜16と、X軸駆動ローラー3,5及びY軸駆動ローラー4,6の回転量を制御して、脆性物30のX軸、Y軸方向の移動及びZ軸回りの回転の複合動作を行う制御手段20とを備えている。
(もっと読む)
基板搬送装置
【課題】 本発明は、カセットに収納された半導体ウエハ等の基板を所定の場所に移載する基板搬送装置に関し、カセット内へのハンド部の挿入時に、変形しているウエハにハンド部が接触するのを防止することを目的とする。
【解決手段】 カセットに上下方向に間隔を置いて水平に収容される基板の先端の上下位置を検出する検出手段と、前記基板の間に水平に挿抜され、下側の前記基板までの距離を測定する距離センサを備え、上面に上側の前記基板を保持する保持部を有するハンド部を備えた搬送手段と、前記検出手段および前記距離センサの検出情報に基づいて前記搬送手段を駆動し前記ハンド部を前記基板の間に挿抜させる制御手段と、を有することを特徴とする。
(もっと読む)
半導体処理装置
【課題】ウェハの直径が大きくなる傾向にある近年、ウェハのウェハホルダに対する着脱、ウェハホルダの各装置に対する着脱を正確、高速かつ安定的に行うことが困難になってきている。
【解決手段】基板を保持する基板ホルダと、基板ホルダを載置するステージとを含む半導体処理装置であって、基板ホルダは、基板を保持するための静電吸着部と、基板を保持する保持面に設けられた貫通孔とを備え、ステージは、一端の開口が基板ホルダを載置する載置面において貫通孔と接続される第1吸引導管と、一端の開口が載置面において貫通孔とは接続されずに基板ホルダに対向する第2吸引導管とを備える。
(もっと読む)
真空処理装置用基板クランプ装置
【課題】
真空処理チャンバ内の寸法を真空処理に必要な寸法まで縮小でき、しかも基板や基板を載せるトレーを操作しやすく、基板又は基板を載せたトレーを制御可能に保持できる真空処理装置用基板クランプ装置を提供する。
【解決手段】
真空処理チャンバ内で処理されることになる基板又は基板を載せたトレーを基板又は基板を載せたトレーの周縁部の少なくとも二つの相対した部位に対して係合する少なくとも二つのクランプ本体を設け、各クランプ本体に接続されて該クランプ本体を昇降させる少なくとも一つの昇降ピンンにより基板又は基板を装着したトレーを基板ホルダー上に独立して調整可能な押圧力で保持する構成される。
(もっと読む)
多軸ワーク移載方法およびその装置
【課題】 多軸ワーク移載装置のテーブルの停止位置決め精度を向上する方法と装置を提供する。また、当該発明によって、移載装置の制御精度を高め、溝加工したテーブルの溝と搬送装置からのワークを搭載したフォークの幅とのはめあい精度を高めチャックピンからなるテーブルに付随の支柱を不要とする。
【解決手段】 ワーク移載用多軸ワーク移載装置において、設定された各移動軸の停止位置にて、停止する位置を設定するセンサが、各停止位置ごとに2個配備された停止位置用フォトセンサを用いる。フォトセンサーは、ライトON制御とダークON制御を用い、且つ両制御のAND判定処理を含めて位置決めする。当該位置決め技術を溝加工したテーブルの溝幅とフォークの幅の寸法差を制御可能な範囲の最小幅とする精度向上に適用する。
(もっと読む)
物品保持装置
【課題】大量の気体を必要とすることなく、非接触で物品を保持できるようにする。
【解決手段】物品保持装置20は、ガラス基板Sに対向可能な物品対向部42及び内部に設けられた空間を有するケース22と、少なくとも1つのファン24と、吸い込み口26と、吹き出し口28と、を備えている。ファン24は、ケース22の空間に配置され、気体を吸い込んで吹き出す。吸い込み口26は、物品対向部42に配置され、ファン24の吸い込み側と連通する。吹き出し口28は、吸い込み口26と異なる位置で物品対向部42に対向して配置され、ファン24の吹き出し側と連通する。
(もっと読む)
101 - 120 / 451
[ Back to top ]