
Fターム[5F031JA17]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 1つの検出対象物に対し複数のセンサを設置 (451)
Fターム[5F031JA17]に分類される特許
41 - 60 / 451
XYステージ
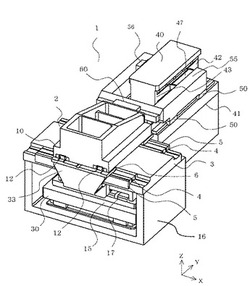
【課題】長ストローク化、小型化及び振動を抑制することが可能な半導体製造装置用のXYステージを提供する。
【解決手段】X軸リニアモータとY軸リニアモータとを有し、X軸リニアモータ及びY軸リニアモータは、移動部としての3相のコイルからなるコイル部及び固定部としてのヨーク部を有し、ヨーク部は、長手方向の中心線に対してその上部及び下部に開口部が設けられており、上部の開口部の上面及び下部の開口部の下面には複数の永久磁石の表面がN極、S極となるように交互に配列され、ヨーク上部の開口部の永久磁石と垂直方向におけるヨーク部下部の開口部の永久磁石は、同じ極となるように配列され、中心付近のヨークに3相のコイルが挿入された構成を成し、ヨーク部をコイル部と同一軸方向に移動可能なヨーク部ガイドを介してベース上に固定し、コイル部の移動時の反力を吸収するように構成し、移動テーブルの下部にX軸リニアモータを配する。
(もっと読む)
リソグラフィ装置および投影アセンブリ

【課題】 能動型制振の安定的な作動範囲を拡大することである。
【解決手段】 リソグラフィ装置が、放射ビームを調整するように配置構成される照明システムと、パターニングデバイスを支持するように構築される支持体とを備える。さらに、リソグラフィ装置は、基板を保持するように構築される基板テーブルと、基板のターゲット部分上にパターン付けされたビームを投影するように配置構成される投影システムとを備える。能動型制振システムが、投影システムの少なくとも一部の振動を減衰するために提供される。能動型制振システムは、投影システムの位置量を測定するセンサおよび、センサにより生成される信号に依拠して投影システムに力を加えるアクチュエータの組合せを備える。能動型制振システムは、制振構造体に連結され、制振構造体は、投影システムに連結される。
(もっと読む)
真空処理装置、電子部品の製造方法及び真空処理プログラム
【課題】 基板搬送用ロボットのフィンガーの変形を精度よく検出する。
【解決手段】 基板を保持可能なフィンガーを有した基板搬送用のロボット、及び、前記ロボットにより基板を搬出入させるための基板搬送口を備えた搬送チャンバと、前記基板搬送口に着脱可能に接続され、前記搬送チャンバ内部に連通する開口を有し、外部に対して密閉された内部空間を形成する筐体、及び、前記内部空間に挿入される前記フィンガーの変形を検出するための変位センサを備えたセンシングポートと、前記搬送チャンバに設けられる排気口を介して、前記搬送チャンバ及び前記筐体内部を排気する排気手段と、前記排気手段により前記搬送チャンバ及び筐体内部を減圧させた状態で、前記筐体の内部空間に挿入されたフィンガーの形状の前記変位センサによる検出結果を取得する制御手段と、を備える。
(もっと読む)
処理装置及び方法、パターン形成装置、露光装置及び方法、並びにデバイス製造方法
【課題】物体表面の面位置情報を取得することなく、物体の上面の面位置制御が可能にする。
【解決手段】処理装置は、移動体WTBに光を照射してその光の照射点における移動体表面のXY平面に直交するZ軸方向の位置情報を計測する複数の面位置センサ(72a〜72d等)を含み、移動体のZ軸方向及びXY平面に対する傾斜方向の位置情報を計測する面位置計測システムと、移動体上に載置されたウエハWに対して検出ビームを照射してウエハW表面の複数の検出点における面位置情報を検出する面位置検出装置(90a、90b)と、面位置計測システムと面位置検出装置とを同時作動の状態にし、面位置検出装置による複数の検出点での検出結果を、同時作動により得られた面位置計測システムでの計測結果を基準としたデータ(Z1〜Zk)に換算する制御装置と、を備える。
(もっと読む)
ステージ装置、基板貼り合せ装置、積層半導体装置の製造方法及び積層半導体装置
【課題】基板貼り合わせ装置構造を簡略化して、基板位置合せ精度を高める。
【解決手段】移動可能な第1ステージと、第1ステージ上に配され、第1ステージに対して移動可能であって、基板を支持する第2ステージと、第1ステージに配され、基板を誘導加熱する誘導加熱部とを備えるステージ装置が提供される。本体に対する第1ステージ可動範囲は、第1ステージに対する第2ステージの可動範囲よりも大きくてもよい。第2ステージは、第1ステージに駆動されるステージ本体と、ステージ本体に対してエアギャップを有して保持され、誘導加熱部の電磁誘導により加熱されて基板に伝熱する発熱体とを有してもよい。
(もっと読む)
保護テープ剥離方法および保護テープ剥離装置
【課題】ウエハ表面から保護テープを精度よく剥離する保護テープ剥離方法および保護テープ剥離装置を提供する。
【解決手段】バックグラインド域を囲焼する環状凸部を裏面に残存形成されたウエハWの当該環状凸部を第1保持テーブル6aで吸着保持するとともに、環状凸部の内壁に近接する外周壁を有する第2保持テーブル6bを環状凸部内側の扁平凹部に挿入し、その扁平面を吸着保持した状態で、ウエハWの表面の保護テープに剥離用の粘着テープTを貼付け、当該粘着テープTを剥離することにより,ウエハWの表面から保護テープを一体にして剥離する。
(もっと読む)
基板処理装置のデータ取得方法及びセンサ用基板
【課題】基板処理装置の各モジュールのデータを効率よく取得すると共に精度高い検査を行うこと。
【解決手段】
モジュールの情報を収集するためのセンサ部と、前記センサ部に電力を供給するための受電用コイルとを備えたセンサ用基板を前記保持部材に保持する工程と、次いで前記保持部材を前進させて前記センサ用基板を前記モジュールに受け渡す工程と、記基台と共に移動する送電用コイルに電力を供給して磁界を形成すると共に、この磁界中で当該送電用コイルと前記受電用コイルとを共鳴させ、前記送電用コイルから前記受電用コイルに電力を供給する工程と、前記センサ部によりモジュールに関するデータを取得する工程と、を含む基板処理装置のデータ取得方法を実行する。
(もっと読む)
位置決めデバイスのためのコントローラ、位置決めデバイスを制御する方法、位置決めデバイスおよび位置決めデバイスを備えるリソグラフィ装置
【課題】ノイズ増幅への感度がより低い可変利得コントローラの提供が望まれている。
【解決手段】位置決めデバイスのためのコントローラは、位置決めデバイスの位置を示す位置信号を受信し、エラー信号を得るために位置信号を位置決めデバイスの所望の位置を示すセットポイント信号と比較し、変更されたエラー信号を得るためにエラー信号の振幅成分および周波数成分に基づいてエラー信号を選択的に変更し、位置決めデバイスを制御するための制御信号を変更されたエラー信号に基づいて生成するように構成される。このコントローラは、リソグラフィ装置の位置決めデバイスの制御に適用されてもよい。
(もっと読む)
真空処理システム
【課題】真空処理室において高温で処理されたウェハを微小異物や汚染が問題にならない温度に効率良く冷却できる真空処理システムを提供する。
【解決手段】複数の試料が収納されたカセットを設置したカセット台と、前記試料を搬送する大気搬送室と、前記大気搬送室から搬送された前記試料を収納し大気雰囲気もしくは真空雰囲気に切り替え可能なロック室と、前記ロックに連結された真空搬送室と、前記真空搬送室を介して搬送された前記試料を処理する真空処理室とを備える真空処理システムにおいて、少なくとも1つの前記真空処理室で処理された前記試料を第一の温度に冷却する冷却室と、前記冷却室で冷却された前記試料を第二の温度に冷却する冷却部とを備え、前記冷却部は、前記大気搬送室に配置され、前記冷却室で冷却された前記試料を前記第二の温度に冷却する冷却手段を有することを特徴とする真空処理システムである。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のアライメント方法、及び表示用パネル基板の製造方法
【課題】マスクのアライメントマークの位置及び基板の下地パターンのアライメントマークの位置を迅速に精度良く検出して、マスクと基板との位置合わせを短時間で高精度に行う。
【解決手段】マスク2と基板1とのギャップ合わせを行う間、第1の画像取得装置51の焦点位置をギャップ合わせ後のマスク2の下面の高さへ移動し、第2の画像取得装置52の焦点位置をギャップ合わせ後の基板1の表面の高さへ移動する。第1の画像取得装置51によりマスク2のアライメントマーク2aの画像を取得して、マスク2のアライメントマーク2aの位置を検出し、第2の画像取得装置52により基板1の下地パターンのアライメントマーク1aの画像を取得して、基板1の下地パターンのアライメントマーク1aの位置を検出する。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】基板の周縁部に切欠きがある基板をフォークにより保持し、搬送するときに、基板位置のずれ量を精度よく検出でき、そのずれ量を容易に補正できるとともに、フォークの状態を同時に確認して補正できる基板搬送装置を提供する。
【解決手段】
基台と、基台から進退自在に設けられ、基板Wを保持する保持部3Aと、保持部3Aが基板Wを保持した状態で後退しているときに、保持部3Aが保持している基板Wの周縁部の位置を、それぞれ異なる位置で検出する4個以上の検出部5と、検出部5が周縁部の位置を検出した検出値に基づいて、検出部5のいずれかが基板Wの周縁部の切欠きが設けられた部分WNを検出したか否かを判定し、一の検出部5が切欠きが設けられた部分WNを検出したと判定したときに、一の検出部5以外の3個の検出部5の検出値に基づいて、次の処理ユニットに搬送するときに処理ユニットの基板Wの受渡し位置に補正する、制御部とを有する。
(もっと読む)
カセットアダプタ、及びアダプタ本体ロック装置
【課題】300mmのウエハを収容する第1カセットに対応のロードポートを使用して、200mmのウエハを収容する第2カセットを設置してロック可能にするアダプタ本体ロック装置を提供する。
【解決手段】300mmのウエハを収容する第1カセットをキャリアベース5にロックするロック用エアシリンダ14を備えたロードポートPに、200mmのウエハを収容する第2カセットK2を設置してロック可能にするために、キャリアベース5に取付けられるカセットアダプタは、キャリアベース5にセットされるアダプタベースVと、アダプタベースVを介して回動可能に装着されるL字形のアダプタ本体Dとから成り、アダプタ本体Dを構成するアダプタプレートEの裏面に、ロック用エアシリンダ14のロッド13の先端のロック爪12に対して解除可能に係合されて、キャリアベース5にアダプタ本体Dを固定可能とする被ロック部材35を一体に設ける。
(もっと読む)
カセットアダプタ、及び着座センサ機構
【課題】直径300mmのウエハを収容する第1カセットに対応のキャリアベースにカセットアダプタを取付けて、直径200mmのウエハを収容する第2カセットの正しい位置への着座を検出する着座センサ機構を提供する。
【解決手段】300mmのウエハを収容可能なロードポートPのキャリアベース5に装着する200mmのウエハを収容可能な第2カセットK2を設置するカセットアダプタであって、アダプタ本体DのアダプタプレートEの裏面には、該アダプタ本体Dがカセット受台Bの傾斜配置位置から(90°−θ)だけ回動されて該アダプタプレートEを水平配置させるストッパボルト33と、前記アダプタプレートEの水平配置を検出するセンサ作動ボルト34が取付けられ、前記アダプタプレートEの上面には、第1カセット用着座センサS1を除き残りを無効にした状態で、第2カセットK2の正しい位置への着座を検出する第2カセット用着座センサを設ける。
(もっと読む)
基板検知装置及び方法
【課題】基板に電圧を印加して基板にダメージを及ぼすことなく、当該基板における、大型基板において特に顕在化する複雑な態様の反りの発生部位及び発生状態を容易且つ正確に特定する。そして、大型基板でも確実なチャッキングに供することを可能とする。
【解決手段】センサ部2は、搭載面1aの中央部分に設けられた第1のセンサ群11と、第1のセンサ群11を囲む第2のセンサ群12と、第2のセンサ群12を囲む第3のセンサ群13とを有する。第1のセンサ群11は、基板面の中央部分に対応して設けられた1つの静電容量センサ10aから、第2のセンサ群12は、第1のセンサ群11を同心状に囲む複数の静電容量センサ10aから、第3のセンサ群13は、第2のセンサ群12を同心状に囲み、搭載面1aの周縁の近くに設けられた複数の静電容量センサ10aを有する。
(もっと読む)
マスクの位置決め装置及びマスクの回転中心算出方法
【課題】マスクステージの回転中心の座標を精度良く求め、これによりマスクと基板との位置決めを高精度で行うことができるマスクの位置決め装置及びマスクの回転中心算出方法を提供する。
【解決手段】位置決め装置70は、回転機構16xを具備するマスクステージ10と、マスクM及び基板Wに設けられた複数のアライメントマークMm、Wmを検知するための複数のアライメントカメラ18と、アライメントカメラ18により得られた画像を用いて各アライメントマークMm、Wmの位置が合うようにマスクステージ10の動作を制御する制御装置71と、を備える。アライメントカメラ18は、各アライメントカメラ18にそれぞれ対応するアライメントマークMm、Wmを撮像し、マスクステージ10を回転させた後、各アライメントマークMm、Wmを再度撮影して、マスクステージ10の回転中心Eの座標を算出する。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】フォークに保持されている基板が正常な位置から位置ずれしているかを容易に検出でき、基板の保持状態に応じて適切な搬送制御を行うことができる基板搬送装置及び基板搬送方法を提供する。
【解決手段】
基板Wを搬送する基板搬送装置において、保持枠3Aと、保持枠3Aの内縁に沿って互いに間隔を隔てて設けられており、基板Wの周縁部が載置される保持部30と、保持部30の各々に設けられ、保持枠3Aに対する基板Wの相対位置を検出する検出部4A、4Bと、保持枠3Aを基板載置部73に進退駆動する駆動部33Aと、基板載置部73から保持部30に基板Wを受け取った際に、各々の検出部4A、4Bの検出値に基づいて、相対位置の補正の要否を判定し、相対位置の補正が必要と判定したときには、補正動作を行い、相対位置の補正が不要と判定したときには、駆動部33Aの駆動を停止するか、又は、基板Wの搬送を継続する、制御部5とを有する。
(もっと読む)
露光ユニット
【課題】専用のプリアライメント装置を設けることなく、短時間で且つ精度良く基板を基板ステージに搭載して、タクトタイムを短縮することができる露光ユニットを提供する。
【解決手段】露光ユニット1は、露光装置PEと、ロボット87と、制御部88と、処理ユニット84に供給された基板Wの位置情報を検出するセンサ100a,100b,100cと、を備える。制御部88は、センサ100a,100b,100cの検出結果と所定の基準位置とのズレ量を算出し、当該ズレ量に基づいてロボット87のアーム部90を処理ユニット84から基板ステージ20に移動しながら、基板Wを基準位置にプリアライメントする。
(もっと読む)
リソグラフィ装置
【課題】リソグラフィ装置の処理能力を大きく損なうことなく、重ね合わせ精度を向上させる方法及び装置を提供する。
【解決手段】露光条件を最適化するために基板の露光時に基板上の位置合わせ標識を検査する。基板10が露光及び位置合わせユニット15の真下で走査を受けるとき、基板のそれぞれの部分が最初に検出器ユニット16の下方を通過し、次いで露光ユニット17の下方を通過する。したがって、基板10のそれぞれの部分に関して検査器ユニット16によって測定された、直線位置、配向、及び膨張に関する情報が露光ユニット17に伝達可能であり、基板が露光ユニット17の真下を通過しながら基板が露光されるとき、基板の当該部分に関する露光条件を最適化することができる。
(もっと読む)
部品搬送方法、部品搬送装置及び部品実装装置
【課題】ベアチップを取出すためのヘッド等の位置決め精度を高度に保つ。
【解決手段】Y軸方向にのみ移動可能なウエハステージ20に支持されたベアチップを移動カメラ50により画像認識した後、X軸方向にのみ移動可能な突上げヘッド30により突上げ、このベアチップをウエハヘッド42a,42bにより保持して搬送する。この動作の前に、ウエハステージ20に設けられるマークを移動カメラ50により撮像する工程と、移動カメラ50を移動させるときのX軸方向の基準座標をその撮像結果に基づいて定める工程と、突上げヘッド30に設けられるマークを移動カメラ50により撮像する工程と、移動カメラ50を移動させるときのY軸方向の基準座標、及び突上げヘッド30を移動させるときの基準座標をその撮像結果に基づき定める工程と、ウエハステージ20を移動させるときの基準座標を前記両撮像結果に基づいて定める工程とを実行する。
(もっと読む)
露光装置及びデバイス製造方法
【課題】流出した液体による被害の拡大を防止し、露光処理及び計測処理を良好に行うことができる露光装置を提供する。
【解決手段】露光装置(EX)は、移動可能なテーブル(PT)と、テーブル(PT)の移動を案内する上面(41A)を有するベース部材(41)と、ベース部材(41)の上面(41A)に液体(LQ)が有るか否かを検出する検出装置(60)とを備えている。
(もっと読む)
41 - 60 / 451
[ Back to top ]