
Fターム[5F031JA17]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 1つの検出対象物に対し複数のセンサを設置 (451)
Fターム[5F031JA17]に分類される特許
121 - 140 / 451
物品保持装置
【課題】大量の気体を必要とすることなく、非接触で物品を保持できるようにする。
【解決手段】物品保持装置20は、ガラス基板Sに対向可能な物品対向部42及び内部に設けられた空間を有するケース22と、少なくとも1つのファン24と、吸い込み口26と、吹き出し口28と、を備えている。ファン24は、ケース22の空間に配置され、気体を吸い込んで吹き出す。吸い込み口26は、物品対向部42に配置され、ファン24の吸い込み側と連通する。吹き出し口28は、吸い込み口26と異なる位置で物品対向部42に対向して配置され、ファン24の吹き出し側と連通する。
(もっと読む)
浮上装置

【課題】ワーク中央領域に搬送方向への空気流が当たることを回避しつつ、ワークの浮上と搬送の両者を良好に行うことができる浮上装置を提供する。
【解決手段】浮上装置11は、浮上ユニット10Mと、その両側にそれぞれ配置された浮上ユニット10A、10Bと、を有する。浮上ユニット10Aは、正圧室を形成するチャンバー36と、チャンバー36の天井壁に固定されワーク搬送面を上面に形成する多孔質板76と、チャンバー36のサイド側であって浮上装置11のサイド側に設けられたサイド搬送部80Aと、を備えている。チャンバー36の天井壁には、溝部と、溝部の溝底を貫通し正圧室と連通する通気孔と、が形成されている。サイド搬送部80Aには、ワーク搬送方向斜め上方に気体を噴き出す気体噴出ノズル90が配置されている。浮上ユニット10Bも同様の構成である。
(もっと読む)
露光装置、露光方法およびデバイス製造方法
【課題】基板上のマークの位置をより短い時間で検出し、基板へのパターンの転写のために要する時間を削減する。
【解決手段】原版のパターンを基板の複数のショット領域に順に転写する。各ショット領域は、チップ領域102aとそれを取り囲むスクライブライン領域S1とを含む。露光装置は、走査方向に駆動されている基板における隣接する第1スクライブライン領域S1、第2スクライブライン領域S2を同時に観察し、前記第1スクライブライン領域、前記第2スクライブライン領域にそれぞれ配置されている第1マーク104a、第2マーク104bからの光を検出する検出器と、前記検出器から出力される検出信号を処理して前記第1マーク、前記第2マークの位置を決定する処理部とを備える。前記基板は、前記第1マークおよび前記第2マークの位置に基づいて位置決めされ、露光される。
(もっと読む)
露光装置、及びそれを用いたデバイスの製造方法
【課題】エンコーダ等の位置計測装置を使用した基板ステージの位置決めを行う際に、スケールの形状に依存する誤差を最小限に抑える露光装置を提供する。
【解決手段】基板5を保持する基板ステージ6と、該基板ステージ6の位置を計測する光学式計測部7と、該光学式計測部7からの計測光の反射対象となるスケール8とを備える露光装置50であって、基板ステージ6が設置された空間内を温度調節するための温調エアを供給する供給系と排気する排気系を有し、供給系は、基板ステージの走査部周辺に温調エアを供給する第1の供給系11、排気系14と、スケール8の設置部周辺に温調エアを供給する第2の供給系13、排気系15とを備える。
(もっと読む)
ウェハアライメント装置及びウェハアライメント方法
【課題】短時間で正確にウェハの位置合わせを行う。
【解決手段】ウェハアライメント装置は、1枚目のウェハの位置を基に2枚目以降のウェハを補正する補正処理と、予め定めた2つの低倍率アライメントパターンと基準位置とのズレ量から前記2枚目以降のウェハに対するXYθ方向の補正を行う低倍率補正処理と、予め定めた2つの高倍率アライメントパターンと基準位置とのズレ量から前記2枚目以降のウェハに対するXYθ方向の補正を行う高倍率補正処理とを具備する制御部を備える。ウェハアライメント方法は、ウェハアライメント装置の処理と同様の処理機能によって、複数のウェハを連続的に入れ替えて処理する際に当該ウェハの位置決めを行う。
(もっと読む)
搬送室
【課題】、組み立ての自由度が高く、メンテナンス作業等の容易化を図ることができる搬送室を提供すること。
【解決手段】少なくとも処理室が接続される複数の側壁を有する筐体51と、筐体51の上部開口を塞ぐ蓋部材52とを具備し、蓋部材52は、筐体51内の搬送装置をメンテナンスするための開口73が設けられた固定蓋71と、固定蓋71の開口73を開閉可能に設けられた開閉蓋72とを有し、開閉蓋72は、上面が平坦であるとともに、内部に空間77を有し、空間77内に、筐体51内部の検出動作を行うセンサー80が取り付けられてユニット化されている。
(もっと読む)
露光装置及びデバイスの製造方法
【課題】露光不良を抑制できる露光装置及びデバイスの製造方法を提供すること。
【解決手段】基板を用いて露光処理を行う露光装置であって、ダウンフローが供給される所定空間を、前記基板を保持して移動するステージと、前記ステージに位置検出用の光を照射する照射装置と、前記ステージの移動に応じて前記ステージの移動経路上の気体を前記光の光路から外れた位置に移動させる気体移動装置とを備える。
(もっと読む)
リソグラフィ装置
【課題】液浸リソグラフィ装置中に液浸液が残存することに関連した問題を軽減し、適切なデバイス製造方法を提供する。
【解決手段】液浸リソグラフィ装置の対象物W、基板テーブルWT、又はその両方から能動的に液体を除去するための能動型乾燥ステーションADSが投射システムと基板露光後処理モジュールとの間に設けられ、基板テーブルWTは該能動型乾燥ステーションADSに対象物Wを搬送し、該能動型乾燥ステーションADSがガス流手段を有する。
(もっと読む)
基板保持機構、およびこの基板保持機構を備える基板処理装置
【課題】基板の搬送や、基板の回転を確実に行うことができる基板保持機構、およびこの基板保持機構を備える基板処理装置を提供すること。
【解決手段】基板処理装置は、基板を保持して回転させるスピンチャックを備えている。スピンチャックは、開位置と閉位置との間で変位可能であり、開位置と閉位置との間の当接位置で基板の周端面に当接して当該基板を保持するための可動ピンと、可動ピンの変位量に応じた変位量で可動ピンと連動し、開位置および閉位置にそれぞれ対応する開検知位置および閉検知位置の間で変位する磁石62と、開検知位置と閉検知位置との間における磁石62の位置に応じて変化する磁界を検知するセンサ64と、センサ64の検出値に基づいて、開位置と閉位置との間における可動ピンの位置を検出する制御部63とを含む。
(もっと読む)
カセットを位置合わせするための方法と装置
【課題】自動ワーク取扱システムにおけるワーク用のカセットを位置合わせするための方法および装置を得ることを目的とする。
【解決手段】この方法では、ワーク取扱システムにおいて、カセットハンドラをロボットブレードに位置合わせする。カセットハンドラは、ワークを担持するための複数のスロットを有するワークカセットを支持するための支持面を有する。この方法は、フレームを前記カセットハンドラ支持面に配置するステップと、ロボットブレードによって担持されるワークを移動するステップと、フレームに対するロボットブレードによって担持されるワークの動作をマッピングするステップとを有する。
(もっと読む)
載置台構造及び処理装置
【課題】被処理体の周辺部における温度分布を個別的に、且つ簡単な構成で制御することが可能な載置台構造を提供する。
【解決手段】被処理体Wに対して熱処理を施すために被処理体を載置する載置台構造において、載置台本体62と、載置台本体内に設けられ、複数のゾーンに分割されて給電ラインLに接続された抵抗加熱ヒータ群88を有する加熱手段86と、電力をゾーン毎に制御するヒータ制御部92とを備え、最外周に位置する最外周ゾーンの抵抗加熱ヒータである最外周抵抗加熱ヒータの周方向に沿った複数の位置に給電ラインL1〜L4を接続することによって最外周抵抗加熱ヒータ100を複数の領域に区分して区分ヒータ100A〜100Dとし、ヒータ制御部は、最外周抵抗加熱ヒータに対応する給電ラインである最外周給電ラインの状態を制御することによって区分ヒータ毎に供給電力を制御する。
(もっと読む)
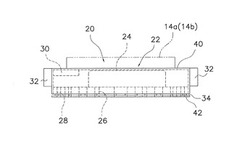
ウエハ保持装置、半導体製造装置およびウエハ吸着方法
【課題】歪みのあるウエハを受け取り、且つ平面に保持するウエハ保持装置、半導体製造装置およびウエハ吸着方法を提供する。
【解決手段】支柱34は下部にフランジを備えた略凸状の断面をもち、カバー38でブロック36上に保持されている。チップ30、リング32、支柱34は何れもチューブ状の中空構造であり、チップ30の先端(上端)には吸着穴が開口している。カバー38は穴42に支柱34が挿通されるようにフランジをブロック36の上に保持している。フランジとカバー38との間には圧電素子40が設けられており、チップ30が引っ張られる方向に外力が作用すると、支柱34がブロック36からフランジを離間させるように動き、カバー38内部でフランジが圧電素子40をカバー38に向けて押圧する構成とされている。
(もっと読む)
基板検出装置およびそれを備えた基板搬送装置
【課題】最小限の数のセンサでカセットに収納されている基板の飛び出しを早く検出することができる基板検出装置を提供すること
【解決手段】水平な状態で上下多段にカセット内に収容された基板Wを検出する基板検出装置において、センサ支持体6a,6bと、光軸が水平になるようセンサ支持体に設置される第1のセンサ9a,9bと、光軸が水平よりも一定角度傾斜するようセンサ支持体に設置される第2のセンサ9c,9dと、センサ支持体を基板Wの周縁に対して前後及び上下させるセンサ支持体駆動手段5と、を備え、第1と第2のセンサの光軸を上下させて基板Wによって光軸H,Sを遮光させ、そのときの第1と第2のセンサの光軸が遮光された間隔によって、少なくとも基板の有無と、基板の斜め状態と、基板の飛び出しと、を検出する。
(もっと読む)
反力補償システム
【課題】半導体ウェハ搬送および/または加工装置で用いられる反力補償システムを提供する。
【解決手段】レーザビームが、ビーム軸に沿って伝播して、支持部に置かれた加工表面に入射する。支持部は、加工表面上の選択した位置にあるレーザビームの位置まで、レーザビームと目標試料の少なくとも1つを互いに対して移動させる位置決めシステムに動作可能に接続されている。少なくとも1つの反力補償モータは、対応するステージモータの共通力面、およびそれに出来るだけ近く位置している。補償モータと対応するステージモータの間のモーメントアームは、低減または除去されて、補償モータが、実施的ステージ力に直接結合し、実質的にゼモモーメントアームでステージ力と反応することができる。各補償モータが、対応するステージモータに直接結合し、一列に整列しているので、4つのモータのみで6自由度を制御することができる。
(もっと読む)
位置検出装置及び露光装置
【課題】高精度又は短時間で検出を行う位置検出装置及びそれを有する露光装置を提供する。
【解決手段】平面エンコーダを用いた位置検出装置を有する露光装置を提供する。位置検出装置の可動部材は、基板ステージの微動可動部24に設けられたXスケール45、46とYスケール47、48、Xエンコーダヘッド51、52とYエンコーダヘッド53、54を有する。位置検出装置の固定部材は、Xスケール、Yスケールを検出するX検出ヘッドユニット25、26、Y検出ヘッドユニット27、28、Xエンコーダヘッド51、52とYエンコーダヘッド53、54が検出するグレーティング31〜34を有する。
(もっと読む)
ステージ装置、露光装置及びデバイス製造方法
【課題】天板の弾性振動による影響が低減され、位置決め精度が向上したステージ装置を提供する。
【解決手段】移動可能な天板と、前記天板を駆動する駆動部とを備えたステージ装置で、前記ステージ装置の座標系を、前記天板の重心位置を原点、前記天板の厚み方向をz軸とする前記天板の慣性主軸に一致した右手座標系(x,y,z)とし、前記天板の質量をJ0、x軸回りの慣性モーメントをJx、y軸回りの慣性モーメントをJy、x0及びをy0をそれぞれx0=(3Jy/J0)1/2、y0=(3Jx/J0)1/2とするとき、前記駆動部は前記天板を前記z軸の方向に駆動する4つのzアクチュエータを含み、前記4つのzアクチュエータは、その前記天板に対する作用点の(x,y)座標がそれぞれ特定に配置されている。
(もっと読む)
ウェーハの偏心補正方法及びウェーハ搬送装置
【課題】、簡易型アライメント装置の設置位置の自在化を高め、設置面積を縮小することができるウェーハの偏心補正方法及びウェーハ搬送装置を提供する。
【解決手段】ウェーハの移動機構として回転機構のみ有する簡易型アライメント装置でウェーハの偏心量を検出し、一方向に往復走行可能な基台と、その基台上で旋回自在に設けられる旋回軸と、その旋回軸に設けられ伸縮自在なアーム部と、そのアームの先端に設けられウェーハを把持するハンドとを有するウェーハ搬送ロボットを用いて、ウェーハの偏心を補正するウェーハの偏心補正方法において、ウェーハの偏心量を、基台の移動量、旋回軸の回転角及びアーム部の伸縮量のうち2つを用いた補正量に換算し、補正量に基づいて、基台の移動、旋回軸の回転及びアーム部の伸縮のうちいずれか2つを行うことによりウェーハの偏心を補正する。
(もっと読む)
真空処理装置
【課題】入出力基板の構成や位置を変えずに制御機器の追加や変更に対応できるようにした真空処理装置を提供すること。
【解決手段】モジュールコントローラ113と入出力基板201の間で制御信号を送受信して真空処理装置の処理室に配置されたウエハを処理する際、モジュールコントローラ113の通信プログラム506と入出力基板201の通信プログラム601による第1のインターフェースと、モジュールコントローラ113の問の信号の送受信を専有する第1のインターフェースと、入出力基板201の通信プログラム601により、処理室にある制御対象の機器と接続された第2のインターフェースとを設け、入出力基板201は、制御対象の機器の動作指令信号の受信は第1のインターフェースにより行ない、制御対象の機器に対する受信した動作指令信号の送信は前記第2のインターフェースを介して行なうようにしたもの。
(もっと読む)
半導体ウエハ処理方法
【課題】 積層された半導体ウエハと保護シートとを取り違えることなく吸着して搬送することができるようにする。
【解決手段】 可撓性アーム26の先端部下面で保護シート22を吸着して持ち上げる。この場合、保護シート22の重さは1〜2gと比較的小さい。このため、保護シート22を持ち上げた可撓性アーム26の撓み量は比較的小さい。一方、可撓性アーム26の先端部下面で半導体ウエハ23を吸着して持ち上げた場合には、半導体ウエハ23の重さが保護シート22の重さの数十倍とかなり大きいので、可撓性アーム26の撓み量は比較的大きい。可撓性アーム26の撓み量は歪みゲージ27で検出される。そして、半導体ウエハ23と保護シート22との重さの相違から、今、可撓性アーム26で持ち上げているものが保護シート22および半導体ウエハ23のいずれであるか判別される。この後、保護シート22または半導体ウエハ23を吸着部材で吸着して別の箇所に搬送する。
(もっと読む)
ワークの中心位置合わせ装置
【課題】ウェーハの中心位置を回転ステージの実際の回転中心位置に正確に合わせることが可能なワークの中心位置合わせ装置を提供する。
【解決手段】ジグを用いて予め求められているアライメント用ステージ回転中心位置にウェーハ中心位置を合致させ得るようにウェーハを回転ステージ上に載せた状態で、アライメント用ステージ回転中心位置に対するウェーハの偏り量を測定するウェーハ偏り量測定手段52と、ウェーハの偏り量に基づいてアライメント用ステージ回転中心位置の補正量を算出するステージ回転中心位置補正量算出手段53と、アライメント用ステージ回転中心位置の補正量に基づいてアライメント用ステージ回転中心位置を補正するステージ回転中心位置補正手段54とを備えたウェーハ中心位置合わせ装置とした。
(もっと読む)
121 - 140 / 451
[ Back to top ]