
Fターム[5F031JA17]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 1つの検出対象物に対し複数のセンサを設置 (451)
Fターム[5F031JA17]に分類される特許
21 - 40 / 451
ステージ装置及び処理装置
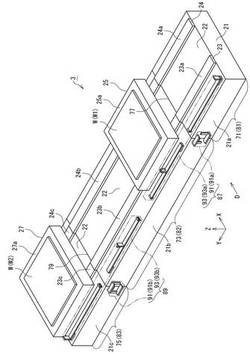
【課題】従来のステージ装置では、ワークに対する処理精度を維持することが困難である。
【解決手段】ワークWを支持するワークテーブル25と、ワークテーブル25の移動を案内する第1ガイド部81と、第1ガイド部81につなぎ合わされており、ワークテーブル25の移動経路を延長する第2ガイド部82と、つなぎ合わされた第1ガイド部81と第2ガイド部82との間の精度を監視する監視装置87と、を有する、ことを特徴とするステージ装置。
(もっと読む)
荷電粒子線装置および静電チャック装置

【課題】反りのある試料に対しても正常な保持動作を行う荷電粒子線装置を提供する。
【解決手段】前記課題を解決するために、本発明の荷電粒子線装置1は、試料ステージ21に保持された試料101に電子線12を照射し、試料101の画像を生成する荷電粒子線装置1であって、試料101の反り量を計測する反り量計測部35と、試料101を吸着する複数の吸着部221を有する静電チャックと、複数の吸着部221のそれぞれの下部に設けられた昇降可能な昇降部222と、反り量計測部35が計測した試料101の反り量に合わせて昇降部222を昇降させる昇降制御部633と、を備えることを特徴とする。
(もっと読む)
プリアライメント装置及びプリアライメント方法
【課題】露光ユニット全体を小型化することができ、また、タクトタイムの短縮を図ることができ、且つ高精度に異物を検出することが可能なプリアライメント装置及びプリアライメント方法を提供する。
【解決手段】プリアライメント装置20は、精密温調プレート22に載置された基板Wの温度を調整する基板温調機構、精密温調プレート22に載置された基板の異物を検出する異物検出機構34を有することで、プリアライメント装置20と基板温調機構と異物検出機構が単一の装置となり、また、搬送用ロボットの数も削減でき、露光ユニット全体を小型化することができる。また、温度の調整が行われている基板にプリアライメント、異物検出を行うことで、タクトタイムの短縮を図ることができる。また、複数のカメラ30のY方向一方側に配置された複数の第1の光源31Aは、隣接する第1の光源31A同士の両端部をY方向から見てオーバーラップさせた状態で、X方向に沿って千鳥状に配置されるので、精度良く異物を検出することが可能となる。
(もっと読む)
半導体ウエハマウント方法および半導体ウエハマウント装置
【課題】収納容器内の搬出対象物を精度よく判別してリングフレームと半導体ウエハの両裏面にわたって支持用の粘着テープを貼り付けてマウントフレームを作成する。
【解決手段】ウエハ収納容器からワークを持ち上げて取り出し、表面側を第1識別センサで検出し、ワークがウエハまたはスペーサのいずれであるかを判別する。ワークがウエハの場合、当該表面における保護テープの有無も判別する。表面に保護テープが無い場合、さらにウエハ収納容器の外周近傍に配備された第2識別センサによってウエハ裏面を検出し、保護テープの有無を判別する。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】電磁石と吸引ターゲットとの間のギャップの大きさの変動による位置決め精度の低下を防止する。
【解決手段】位置決め装置は、第1部材と第2部材との相対位置を制御するように構成され、前記第1部材に固定された電磁石と、前記電磁石によって吸引されるように前記第2部材に固定された吸引ターゲットと、前記電磁石が発生する磁束値を検出する磁束センサと、前記電磁石と前記吸引ターゲットとの間のギャップの大きさに応じて磁束指令値を補正することによって得られた補正磁束指令値と前記磁束センサによって検出された磁束値との偏差に応じて前記電磁石を駆動する駆動部とを備える。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
基板搬送方法、基板搬送装置、及び塗布現像装置
【課題】基板搬送装置のバキューム機構に用いられるパッドからの基板のずれを検出可能な基板搬送方法を提供する。
【解決手段】この基板搬送方法では、複数の載置部のうちの一の載置部の基板を保持部で受け取って保持し、保持部に保持される基板を一の載置部から搬出し、保持部に保持される基板の保持部に対する位置(第1の位置)を検出し、保持部に保持される基板を他の載置部に臨む場所まで搬送し、その場所において、保持部に保持される基板の保持部に対する位置(第2の位置)を検出し、第1の位置及び第2の位置に基づいて、搬送前後において生じた、基板の保持部に対する位置ずれ量を算出し、算出された位置ずれ量が所定の範囲に入るか否かを判定する。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
プラズマ処理装置及びプラズマ処理方法
【課題】プラズマ処理装置において、シングルアーム型の搬送装置を採用しつつ高スループットを実現する。
【解決手段】ドライエッチング装置1の搬送装置15は、処理前のトレイ3をストック部13のカセット62の主棚部67b,68bから回転ステージ33に搬送し、回転ステージ33でのアラインメント処理後のトレイ3をカセット62の仮置き棚部67c,68cを経てプラズマ処理部11へ搬送する。また、搬送装置15は、処理後のトレイ3をプラズマ処理部11からストック部13のカセット62の主棚部67b,68bに搬送する。
(もっと読む)
気相成長装置
【課題】サセプタの交換の際にサセプタの位置ずれの問題が生じない気相成長装置を得る。
【解決手段】本発明に係る気相成長装置は、サセプタ3が着脱可能に設置されて気相成長を行う反応炉5と、サセプタ3を搬送する搬送ロボット7と、搬送ロボット7及び反応炉5が収容されるグローボックス9と、グローボックス9内に設置されてサセプタ3の交換時にサセプタ3を一時的に載置する交換テーブル11と、グローボックス9の側壁に設けられてサセプタ3の交換を行う交換ボックス13とを備えた気相成長装置1であって、交換テーブル11は、サセプタ3が載置されると回転して所定の回転位置で停止することでサセプタ3の回転方向の位置を決める位置決め装置15を備えてなることを特徴とするものである。
(もっと読む)
露光装置、露光方法、デバイス製造方法、プログラム、及び記録媒体
【課題】露光不良の発生を抑制できる露光装置を提供する。
【解決手段】露光装置は、液体を介して露光光で基板を露光する。露光装置は、露光光が射出される射出面を有する光学部材と、基板を保持する第1保持部15と、第1保持部15の周囲の少なくとも一部に配置され、射出面が対向可能なスケール部材Tと、を有し、所定面内を移動可能な基板ステージ2Pと、所定面内を移動するスケール部材Tの表面が対向可能な位置に配置され、スケール部材Tの表面の異物を除去可能な除去部材を有する除去装置と、を備える。
(もっと読む)
ウエハ検査装置及びプローブカードのプリヒート方法
【課題】ウエハ検査装置の設置スペースを削減することができると共に設置コストを低減することができるウエハ検査装置を提供する。
【解決手段】本発明のウエハ検査装置10は、ウエハを一枚ずつ搬送するように第1の搬送領域S2に設けられた第1のウエハ搬送機構12と、第1の搬送領域の端部にあるアライメント領域S3内でウエハ保持体15を介して第1のウエハ搬送機構12によって搬送されるウエハWを検査位置にアライメントするアライメント機構14と、第1の搬送領域S2及びアライメント領域S3に沿う第2の搬送領域S4内でウエハ保持体15を介してウエハWを搬送する第2のウエハ搬送機構16と、第2の搬送領域に沿う検査領域S5に配列され且つウエハ保持体15を介して第2のウエハ搬送機構16によって搬送されるウエハWの電気的特性検査を行う複数の検査室17と、を備え、検査室17ではアライメント後のウエハの電気的特性検査を行う。
(もっと読む)
基板処理装置及び基板処理方法
【課題】スループットを低下させることなく、時間のロス無しに基板のアライメントを可能とした基板処理装置を提供する。
【解決手段】本発明の基板処理装置は、基板2を出し入れする仕込/取出室3と、前記基板に対して所定の真空処理を行う処理室と、前記仕込/取出室と前記処理室との間における前記基板の受け渡しを行う搬送室と、を備えた基板処理装置であって、前記仕込/取出室は、真空排気可能なチャンバ11と、前記チャンバ内に配され、前記基板が載置される支持部12と、前記支持部上に載置された前記基板の位置ずれ量を検出する測定部と、前記測定部によって検出された前記基板の位置ずれ量に応じて、前記基板の位置を修正するアライメント部と、を有することを特徴とする。
(もっと読む)
真空処理装置および真空処理方法
【課題】トレイに対するマスクの位置ずれをより正確に検知する。
【解決手段】真空処理装置は、基板を真空処理する真空処理室と、前記基板と、前記基板を載置可能なトレイと、前記トレイに載置されるマスクと、からなる組体と、前記組体を前記真空処理室内に搬送する搬送アームと、前記真空処理室内に設置され、前記組体を支持する支持台と、前記真空処理室内に設置され、前記搬送アームと前記支持台の間で前記組体を移動させるリフタと、を備え、前記組体の状態を検出可能な複数の検出手段を有し、前記検出手段からの複数の検出結果によって前記マスクと前記トレイとの位置がずれた状態と判断する判断手段が設けられている。
(もっと読む)
基板搬送装置の位置調整方法、及び基板処理装置
【課題】調整治具を使用することなく搬送位置調整を行うことが可能な基板搬送装置の位置調整方法を提供する。
【解決手段】基板を搬送する基板搬送部により基板を保持し、基板の位置を検出する第1検出ステップと、基板搬送部により保持される基板を、基板を保持して回転する基板回転部へ搬送するステップと、基板回転部に保持される基板を、基板回転部により所定の角度だけ回転するステップと、基板回転部により回転された基板を、基板搬送部から受け取るステップと、基板搬送部が受け取った当該基板の位置を検出する第2検出ステップと、第1検出ステップで求めた基板の位置と、第2検出ステップで求めた基板の位置とに基づいて、基板回転部の回転中心位置を把握するステップと、把握された回転中心位置に基づいて、基板搬送部の位置を調整するステップとを含む基板搬送装置の位置調整方法が提供される。
(もっと読む)
研削装置
【課題】保持テーブルの回転によるワークの位置ずれを抑制でき、ワークの位置を精度よく検出できる研削装置を提供すること。
【解決手段】研削装置の検出手段における保持テーブル8aは、上面中央に吸引口8lを有する基台部8gと、基台部8g上に吸引口8lを囲むように配設された環状部材8hと、基台部8g上の環状部材8hの内側に配設された中央部材8iと、を有し、環状部材8hは非通気性と弾性とを有しワークW表面に貼着された保護テープの凹凸を吸収できる厚みであり、中央部材8iは通気性と弾性とを有する構成とした。
(もっと読む)
加熱処理装置、およびこれを備える塗布現像装置
【課題】気流制御を通して基板を均一に加熱することが可能な加熱処理装置およびこれを備える塗布現像装置を提供する。
【解決手段】基板を収容可能で、前記基板Sが通過する第1の搬入口62Iおよび第1の搬出口62Oを有する筐体と、前記第1の搬入口62Iから前記第1の搬出口62Oへ向かう方向に前記基板Sを搬送する第1の搬送機構と、前記第1の搬送機構により前記筐体内を搬送される前記基板Sを加熱するヒータ72と、前記筐体に設けられる排気口であって前記第1の搬入口62Iおよび前記第1の搬出口62Oから前記排気口に至る気流を形成可能な当該排気口と、前記第1の搬入口62Iおよび前記第1の搬出口62Oの一方または双方に臨んで設けられ、吸気により前記気流を調整する当該吸気口とを備える加熱処理装置が開示される。
(もっと読む)
搬送装置
【課題】板状部材を搬送する際の当該板状部材の外周部垂れ下がり打ち消して搬送することのできる搬送装置を提供すること。
【解決手段】先端にウエハWの吸着アーム14を備えた多関節型ロボットからなる搬送装置10であり、当該搬送装置10は、前記ウエハWを保持したときの重さで吸着アーム14が撓んでウエハWが垂れ下がったときに、ウエハWの外周部における垂れ下がり量及び基準線L方向のずれ量を打ち消すように吸着アーム14を角度調整してウエハWを略水平姿勢に保つように構成されている。ウエハWの垂れ下がり量は、第1及び第2の測長器40,41による測長によって求めることができる。
(もっと読む)
コントローラ、リソグラフィ装置、オブジェクト位置の制御方法及びデバイス製造方法
【課題】改良型の制御システムを提供する。
【解決手段】オブジェクト上に作用するように配置された複数のアクチュエータを有するアクチュエータシステムを制御するコントローラが提供される。該コントローラは、ゲインバランシングマトリクスを用いてオブジェクトの重心に提供されることが望まれる一組の力を表す第1の制御信号を前記複数のアクチュエータによって提供される同等の力の組を表す第2の制御信号に変換する。システムは、第1の周波数帯域で第1のゲインバランシングマトリクスが使用され、第2の周波数帯域で第2のゲインバランシングマトリクスが使用されるようにさらに構成される。
(もっと読む)
露光方法及び露光装置
【課題】 本体構造体の弾性変形を計測するレーザ干渉計を追加することなく、本体構造体の弾性変形により発生するステージ間の相対位置誤差を補正する露光装置を提供すること。
【解決手段】 露光装置1は、マスク2を保持するマスクステージ4と、基板3を保持するプレートステージ5と、マスクステージ4とプレートステージ5の位置を計測するレーザ干渉計と、レーザ干渉計の計測結果に基づいてマスクステージ4とプレートステージ5の位置を制御する制御演算器16および駆動装置と、マスク2に描画されたパターンを基板3に投影する投影光学系6とを有する。本体構造体7上のレーザ干渉計支持台と投影光学系6の傾き量を傾斜角計17(a),17(b),17(c)により計測して、該計測結果からマスクステージ4とプレートステージ5の相対位置誤差を補正する。
(もっと読む)
21 - 40 / 451
[ Back to top ]